(5) КАБЕЛЕУКЛАДЧИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Кабелеизвлекающая машина | 1983 |
|
SU1143809A1 |
| Кабелеукладчик | 1980 |
|
SU861501A1 |
| Кабелеукладчик | 1976 |
|
SU703631A1 |
| Кабелеизвлекающая машина | 1984 |
|
SU1187232A1 |
| Устройство управления кабелеизвлекающей машиной | 1988 |
|
SU1594251A1 |
| Металлоискатель | 1980 |
|
SU911416A1 |
| Устройство для управления движением тягового средства прицепного кабелеукладчика | 1985 |
|
SU1308989A1 |
| Способ регистрации кабельной трассы в грунте | 2021 |
|
RU2786685C1 |
| Устройство для управления движением самоходного кабелеукладчика | 1986 |
|
SU1368861A1 |
| Устройство для определения местоположения скрытых металлопроводов | 1979 |
|
SU859981A1 |
1
Изобретение относится к технике мсжтажа и демонтажа -кабельных линий, а ииенно к кабелеукладчикан, работаЮ8|им в режиме извлечения кабеля из грунта.
Известен кабелеукладчик, содержащий устройство для (этредепения глубины залегания кабеля и позволяснций извлекать кабель из грунта при сме(цениях рабочего органа на все ширину захвата вскрывапа(его корпуса.
Известный кабелеукладчик работает в режиме извлечения кабеля следую«(им образом. Кабелеукладчик устанавливают на трассе извлекаемого кабеля, подключают к нему один полюс генератора, а второй полюс заземляют. Далее заглубляют рабочий орган на глубину с обеспечением заданной величины защитного слоя грунта над кабелем и перемещают кабелеукладчик по трассе.
Рюбочий орган кабелеукладчИка удерживается на заданном расстоянии
от извлекаемого кабеля при помощи аппаратуры определения глубины по величине напряжения датчика, сравниваемого с напряжением опорного датчика. На заданном расстоянии напряжения выравнивают и на выходе получают разностный сигнал, равный нулю. В процессе движения при изменении расстояния мексду рабочим органом и извлекаемым кабелем появляется разностжж напряжение, пропорциональное изменению расстояния, с полярностью, определяемой направлением изменения. Это напряжение поступает на исполнительное устройство, которое изменяет величину заглубления рабочего органа так, чтобы разностный сигнал был равен нулю fl.
Недостатком известного кабелеукладчика является то, что при смещении рабочего органа с трассы происходит уменьшение уровня напряжения на выходе датчика глубины, что равносильно увеличению расстояния
между кабелем и рабочим органом, а это приводит к появлению ложного сигнала .на заглубление. Рабочий орган заглубляется на величину, превышающую глубину залегания кабеля, и при возвращении на трассу возможно повреждение извлекаемого кабеля.
Целью изобретения является исключение повреждения извлекаемого кабеля при сходах рабочего органа с трассы кабеля.
Поставленная цель достигается тем, что кабелеукладчик снабжен устройством автоматической блокировки рабочего органа, содержащим два индуктивных датчика, установленных вертикальной по обе стороны рабочего органа, два усилителя-ограничителя, сумматор, детектор и реле при этом выходы индуктивных датчиков соединены со входами усилителейограничи телей, выходы которых подключены ко 1входам сумматора, а выход сумматора через детектор соединен с обмоткой реле, контакты которого включены в систему управления гидроприводом перемещения рабочего органа по вертикали.
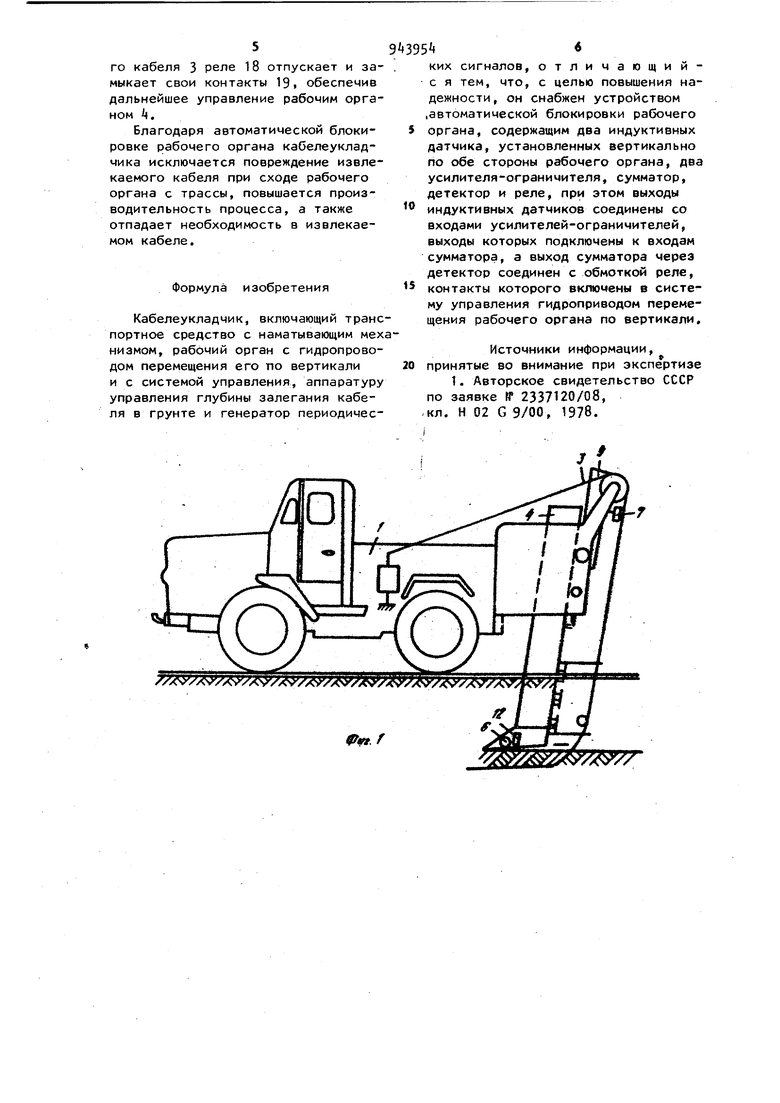
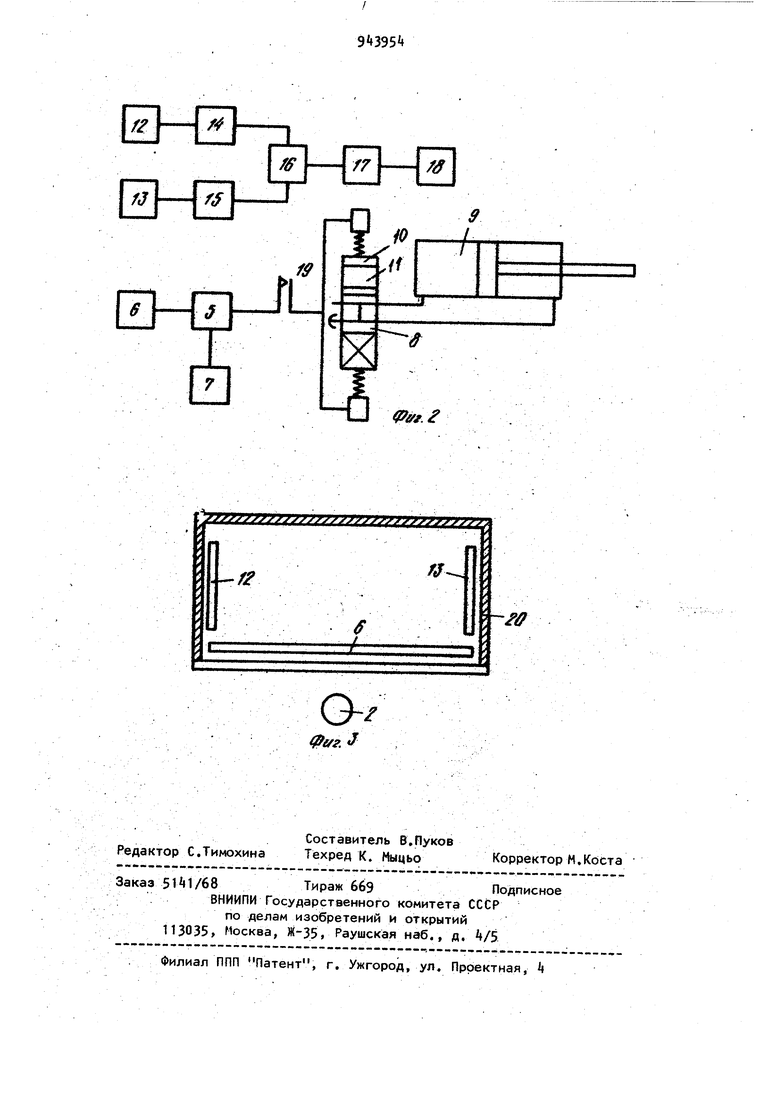
На фиг. V схематически изображен предлагаемый кабелеукладчик; на фиг. 2 - блок-схема аппаратуры определения глубины; на фиг. 3 - схема расположения датчиков относительно рабочего органа.
На кабелеукладчике 1 установлен генератор 2 периодических колебаний 2, подключенный к извлекаемому кабелю 3, и рабочий орган Ц.
Схема автоматической блокировки рабочего органа k включает аппаратуру определения глубины 5 индукционный датчик глубины 6, опорный индукционный датчик 7, электрогидрозолотник 8, гидроцилиидр 9 изменения положения по вертикали рабочего органа 4, гидронасос 10, гидрорезервуар 11, индукционные датчики 12, 13 усилители-ограничители Ik, 15 сумматор 16, выпрямитель 17, реле 18 с контактами 19. Рабочий орган k снабжен вскрывающим корпусом 20.
Кабелеукладчик работает следующим образом.
Перед извлечением кабелеукладчик 1 устанавливают на трассу извлекаемого кабеля 3, подключают к кабелю выход генератора 2, заглубляют рабочий орган 4 на требуемую глубину
и регулировкой усиления получают нулевое напряжение на выходе аппара туры определения глубины. После этого происходит передвижение кабелеукладмика по трассе.
Когда извлекаемый кабель находится под датчиком глубины 6 на вертикальных индукционных датчиках 12, 13, переменные напряжения, наводимые
током, протекающим по кабелю,
находятся в противофазе. После усиления и ограничения усилителями-ограничителями 1, 15 эти напряжения возникают на входах сумматора 16,
на выходе которого напряжение равно нулю. Реле 18 обеспечивается и контакты 19 этого реле замкнуты, напряжение с выхода аппаратуры определения глубины подключается к входу
электрогидрозолотника 8, который подключает верхнюю полость гидроцилиндра 9 к выходу гидронасоса 10, гидрожидкость из резервуара 11 поступает в ту или иную полость. Гидроцилиндр 9 своим штоком, соединенным с плавающим рабочим органом k, в зависимости от того, какая полость открыта, перемещает его до тех пор, пока напряжение на выходе аппаратуры
определения глубины не становится равным нулю. Электрогидрозолотник 8 возвращается в нулевое положение, перекрывает гидропроводы гидроцилиндра 9 и рабочий орган k останавливается.
Таким образом, рабочий орган 4 удерживается над извлекаемым кабелем 3 на заданном расстоянии. При смещении рабочего органа с трассы извлекаемого кабеля 3, например на крутых поворотах, вертикальные индукционные датчики 12, 13 находятся ло одну сторону от извлекаемого кабеля 3. Наводимые на них напряжения в этом случае находятся в фазе и после усиления ограничения и суммирования на выходе сумматора 16 получают напряжение удвоенной амплитуды. После детектирования это напряжение возникает на обмотке реле 18.
Реле 18 срабатывает и размыкает свои контакты 19, отключив выход аппаратуры определения глубины от
электрогидрозолотника 8, и рабочий орган остается в плоскости, лежа щей выше извлекаемого кабеля 3. После возвращения на трассу извлекаемо5го кабеля 3 реле 18 отпускает и замыкает свои контакты 19, обеспечив дальнейшее управление рабочим органом Ц. Благодаря автоматической блокировке рабочего органа кабелеукладчика исключается повреждение извлекаемого кабеля при сходе рабочего органа с трассы, повышается производительность процесса, а также отпадает необходимость в извлекаемом кабеле. Формула изобретения Кабелеукладчик, включающий транс портное средство с наматывающим мех низмом, рабочий орган с гидропроводом перемещения его по вертикали и с системой управления, аппаратуру управления глубины залегания кабеля в грунте и генератор периодичессигналов, отличающийкихс я тем, что, с целью повышения нас я дежности , он снабжен устройством .автоматической блокировки рабочего органа, содержащим два индуктивных датчика, установленных вертикально по обе стороны рабочего органа, два усилителя-ограничителя, сумматор, детектор и реле, при этом выходы индуктивных датчиков соединены со входами усилителей-ограничителей, выходы которых подключены к входам сумматора, а выход сумматора через детектор соединен с обмоткой реле, контакты которого включены в систему управления гидроприводом перемещения рабочего органа по вертикали. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2337120/08, кл. Н 02 G 9/00, 1978.
ffg
