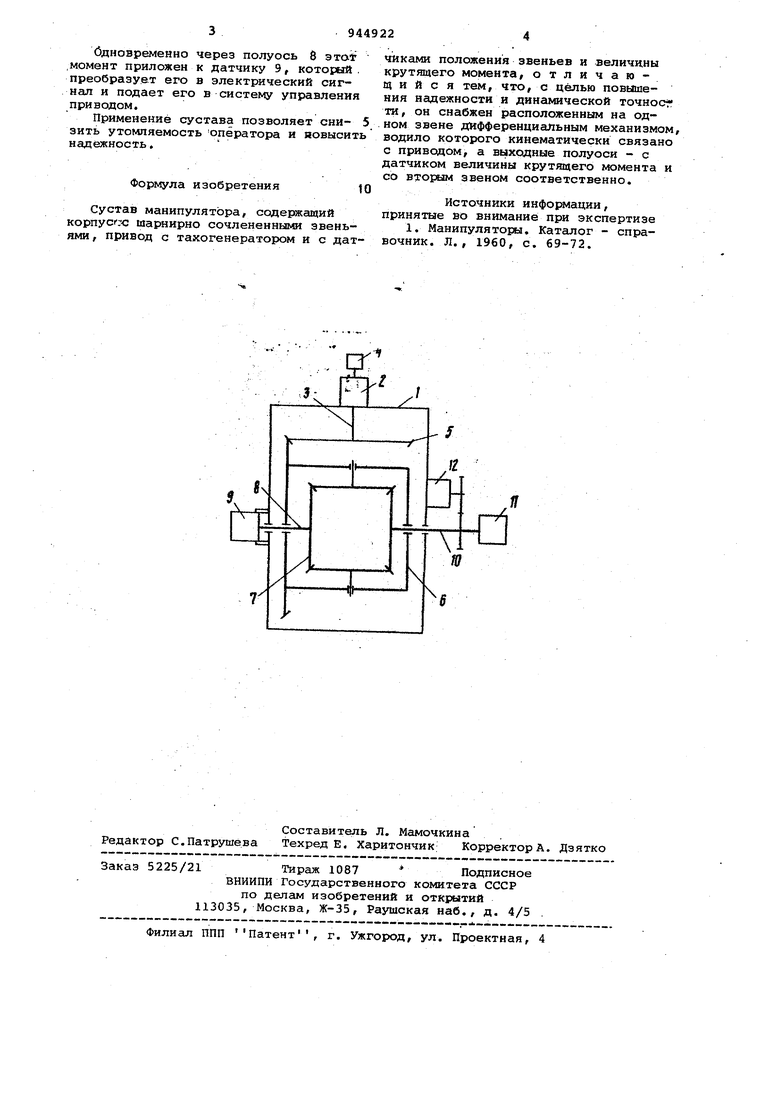
Изобретение относится к машиност роению и может быть использовано при создании исполнительных органов дис.танционно-управляемых манипуляторов. Известен манипулятор, содержшций корпус с шарнирно сочлененными звень ями, привод с тахогенератором и с да чиками положения и величины крутящего момента 1. Величина крутящего мо1яента данног сустава характеризуется закруткой уп ругого элемента датчика, которая пре образуется датчиком положения в элек трический, сигнал. Недостаток известного сустава манипулятора состоит в том, что датчик величины крутящего момента включен в основную кинематическую цепь. Для более точного измерения величины привода крутящего момента датчик должен обладать достаточно низким коэффициентом жесткости. Наличие частных деформаций датчика величины крутящего момента приводи - к частому выходу его из строя, что снижает надежность манипулятора в целом, а также его точность и быстродействие. Цель изобретения - повЕЛшение надежности и динамической прочности системы управления. Для достижения указанной цели сустав манипулятора снабжен расположенным на одном звене дифференциальным механизмом, водило которого кинематически связано с приводом, а выходные полуоси - с датчиком величины крутящего момента и со вторьш звеном соответственно. На чертеже изображен схематично сустав манипулятора. На корпусе неподвижного звена 1 сустава манипулятора размещен двигатель 2 с расположенным на его валу 3 тахогенератором 4 и шестерней 5, которая находится в зацеплении с шестерней водила 6 дифференциала 7. Полуось 8 дифференциала 7 связана с датчиком момента 9, а полуось 10 с подвижным звеном 11 и датчиком положения 12. Сустав работает следующим образом. При подаче на привод сигнала управления включается двигатель 2. Момент, развиваемый двигателем, передается через шестерню 5, водило 6, дифференциал 7 к подвижному звену 11 и датчику 12 положения. бдновременно через полуось 8 это-Чё ,момент приложен к датчику 9, который, преобразует его в электрический сигнал и подает его в систему управления приводом. Применение сустава позволяет сниэить утомляемость оператора и новысить надёжность. Формула изобретения Сустав манипулятора, содержащий корпусе шарнирно сочлененными звеньями , привод с тахогенератором и с датчиками положения звеньев и величины крутящего момента/ отличающийся тем, что, с целью повышения надежности и динамической точнос:г ти, он снабжен расположенным на одном звене дифференциальным механизмом, водило которого кинематически связано с приводом, а выходные полуоси - с датчиком величины крутящего момента и со вторым звеном соответственно. Источники информации, принятые во внимание при экспертизе 1. Манипуляторы. Каталог - справочник. Л. ,1960, с. 69-72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления блокируемым дифференциальным приводом колес транспортного средства и устройство для его осуществления | 1983 |
|
SU1130501A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ШУМАТОВА (ВАРИАНТЫ) | 2014 |
|
RU2577966C1 |
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| Кистевой узел манипулятора | 1979 |
|
SU835734A1 |
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| Механизм привода ведущих колес транспортного средства | 1984 |
|
SU1168440A1 |
| Система выключения блокировки дифференциала транспортного средства | 1973 |
|
SU500089A1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| Ведущий мост транспортного средства | 1990 |
|
SU1701578A2 |
S:
