РЬобретение относится к машиностроению и может быть использовано в дистанционно-управляемых манипуляторах.
Известно техничское устройство, содержащее ось с захватом, приводной механизм с дифферепп,иалом и механические .передачи, кинематически связывающие захват с дифференциалом fl.
Недостатком известного устройства является то, что оно не обеспечивает одновременного вращательного и возвратно-поступательного движений захвата, что сужает технологические возможности устройства.
Цель изобретения - расщир-ение технологических возможностей устройства, в частности кистевого узла манипулятора.
Цель достигается тем, что на оси выполнены виптовой и щлицевой участки, причем одна из полуосей дифференциала через одну механическую передачу кинематически связана с винтовым участком оси, а вторая полуось дифферсрщиала через вторую механическую передачу, выполненную в виде двустороннего зубчатого механизма и самотормозящего механизма, кинематически связана со щлицевым участком оси.
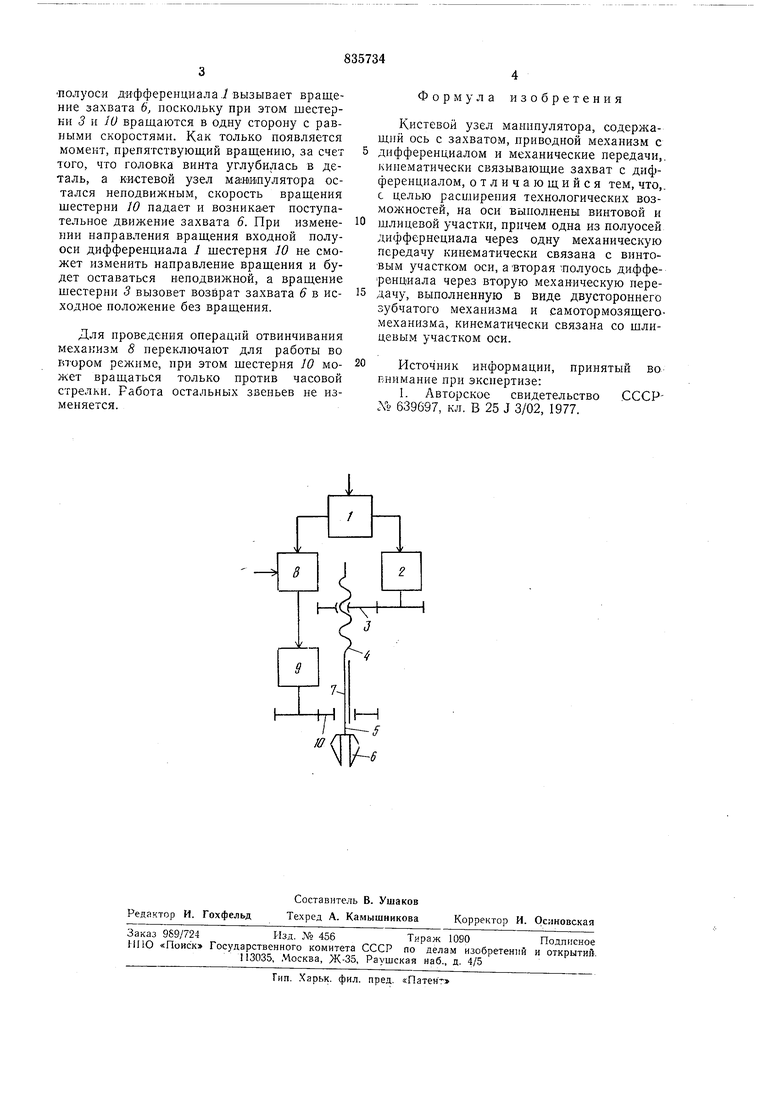
На чертеже показана схема кистевого узла манипулятора.
Кистевой узел манипулятора содержит приводной механизм с дифференциалом /,
одна из полуосей которого через первуюмеханическую передачу 2 и щестерпю 3 кинематически связана с винтовым участком 4 оси 5, на которой закреплен захват 6. Другая полуось дифференциала / кинематически связана со щлицевым участком 7 оси 5 через двусторонний зубчатый механизм 8, и самотормозящий механизм 9, представляющие собой вторую механическую передачу, и шестерню 10.
Кистевой узел манипулятора работает следующим образом.
Механизм 8 обеспечивает три режима работы кистевого узла. В первом режиме он обеспечивает свободное вращение щестерни 10 по часовой стрелке, во втором - против часовой стрелки, а в третьем - фиксацию шестерни 10. Этим положениям механизма 8 соответствуют режимы вращения захвата в противоположные стороны и возвратно-поступательного движения захвата, что соответствует выполнению операций завинчивания, отвинчивания и осевого перемещения захвата 6. Переключение режимов работы механизма 8 осуществляется рычагом (па чертеже не показан), выступающим за пределы кистевого узла. При выполнении операции завинчивания после захватывания винта (на чертеже не показан) губками захвата 6 вращение входной
полуоси дифференциала./вызывает вращение захвата 6, поскольку при этом шестерки 3 и Ш вращаются в одну сторону с равными скоростями. Как только появляется момент, препятствующий вращению, за счет того, что головка винта углубилась в деталь, а Кистевой узел манипулятора остался неподвижным, скорость вращения шестерни 10 падает и возникает поступательное движение захвата 6. При изменении направления вращения входной полуоси дифференциала 1 щестерня 10 не сможет изменить направление вращения и будет оставаться неподвижной, а вращение шестерни 3 вызовет возврат захвата 6 в исходное положение без вращения.
Для проведения операций отвинчивания механизм 8 переключают для работы во втором режиме, при этом щестерня 10 может вращаться только против часовой стрелки. Работа остальных звеньев не изменяется.
Формула изобретения
Кистевой узел манипулятора, содержащий ось с захватом, приводной механизм с
дифференциалом и механические передачи,, кинематически связывающие захват с дифференциалом, отличающийся тем, что,. с целью расширения технологических возможностей, на осн выполнены винтовой н шлицевой участки, причем одна из полуосей диффернециала через одну механическую передачу кинематически связана с винтовым участком оси, а вторая полуось дифференциала через вторую механическую передачу, выполненную в виде двустороннего зубчатого механизма и самотормозящегомеханизма, кинематически связана со шлицевым участком оси.
принятый во
Источник информации, внимание при экснертизе:
.СССР1. Авторское свидетельство Л 639697, кл, В 25 J 3/02, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU831615A1 |
| Захват манипулятора | 1974 |
|
SU503714A1 |
| Транспортное средство | 1979 |
|
SU829457A1 |
| Привод ведущих колес многоосного транспортного средства | 1984 |
|
SU1273274A1 |
| Протез руки | 1974 |
|
SU506410A1 |
| УПРАВЛЯЕМЫЙ ДИФФЕРЕНЦИАЛ | 2004 |
|
RU2276299C1 |
| Способ реверсирования направления движения при испытаниях транспортных средств | 1986 |
|
SU1383134A1 |
| ДИФФЕРЕНЦИАЛ В.П.ДЕМИНА | 1997 |
|
RU2129232C1 |
| Проходной мост (варианты) | 2015 |
|
RU2611856C1 |
| МЕХАНИЗМ ПРИВОДА НОЖА ПРИЦЕПНОЙ ЖАТКИ | 1969 |
|
SU247685A1 |
