Изобретение относится к обработке металлов давлением и может быть использовано в кузнечных цехах предприятий.
Известен высокоскоростной горизонтальный бесшаботный молот, содержащий размещенные на раме два силовых цилиндра со средствами синхронизации и блоками управления перемещением рабочих органов, а также устройство автоматической подачи заготовок р.
Недостатками известного молота являются его низкие КПД и качество поковок, что обусловлено наличием длинных трубопроводов, соединяющих следящие и взводящие камеры противоположных цилиндров синхронизации, а также выполнением силовых и синхронизирующих цилиндров в одном корпусе и связанной с этим возможностью попадания газа в гидросистему молота, что приводит к различию в скоростях перемещения рабочих органов, и смещению плоскости соударения инструментов.
Цель изобретения - повышение КПД и.качества поковок.
5 Поставленная цель достигается тем, что в высокоскоростном горизонтальном бесшаботном молоте, содержащем t размещенные на раме два силовых цилиндра со средствами синхронизации и
О блоками управления перемещением рабочих органов, а также устройство автоматической подачи заготовок, упомянутые средства синхронизации выполнены в виде закрепленных на раме симмет5 рично оси молота цилиндров с концентрично смонтированными в корпусе каж-дого из них и закрепленными на противоположных рабочих органах двумя штоками, один из которых выполнен
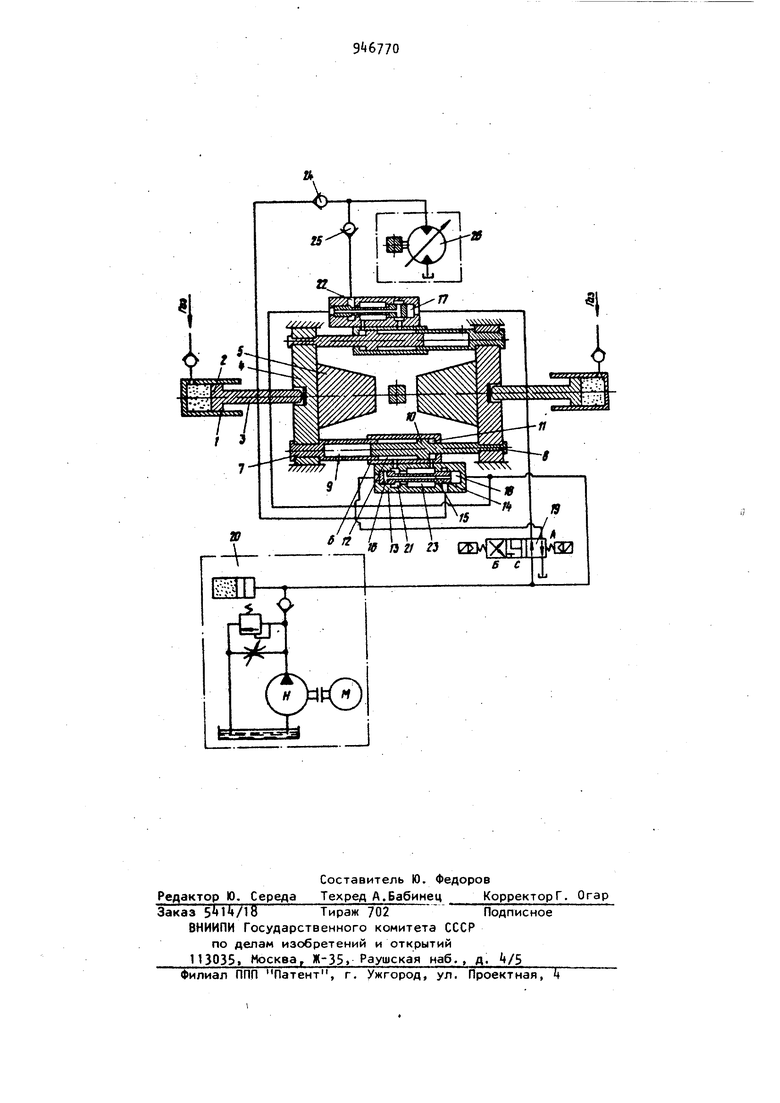
20 полым, а другой - с поршнем в средней части, разделяющим корпус цилиндра на взводящую и следящур камеры, при этом каждый блок управления перемещением рабочих органов, соединен соследящей и взводящей камерами соответствующего цилиндра синхронизации и с приводом устройства автома тической подачи заготовок. На чертеже изображено устройство общий вид . Высокоскоростной горизонтальный бесшаботный молот содержит смонтиро ванные на раме (не показана) силовы цилиндры 1 с установленными в них поршнями 2 со штоками 3 связанными с рабочими органами k, на которых установлены инструменты 5, а также корпусы 6 цилиндров синхронизации, в каждом из которых концентрично. установлены по два штока 7 и 8, закрепленных на противоположных рабочих органах. Штоки 7 выполнены полы ми и в них предусмотрены отверстия 9. для выхода воздуха. На штоках 8 в , средней части установлены поршни 10 разделяющие корпусы 6 на следящие. 11 и взводящие 12 камеры. В блоках 13 управления перемещением рабочих органов k расположены дифференциальные золотники I с осевыми 15 и радиальными 16 каналами, образующие с корпусами блоков 13 камеры 17и 18 управления, соединенныечерез распределитель 19 с напорной магистралью насосной станции 20, а также полости 21 и 22 и промежуточные камеры 23- Полости 21 соединены каналами со взводящими камерами 12, промежуточные камеры 23 со следящими камерами 11 , а полости 21 соединены обратные клапаны с.приводом 26 устройства автоматиче кой подачи заготовок. Высокоскоростной горизонтальный бесшаботный молот работает следующи образом. Жидкость от насосной станции 20 поступает одновременно в камеры 18управления блоков 13 и через рас пределитель 19 (положение А) в одну из камер 17 управления. Камера 17 управления другого блока через, распределитель 19 соединена со сливом. Давление в-камерах 17 и 18 вер него блока управления возрастает и, ввиду того, что площадь со стороны камеры 17 больше, золотник 1Д под действием результирующей силы перемещается, соединяя напорную магистраль насосной станции 20 через осеВОЙ 15 и радиальный 16 каналы и полость 21 с взводящей камерой 12 верхнего цилиндра синхронизации, а следящую камеру 11 через промежуточную камеру 23 и полость 22 с приводом 25 устройства автоматической подачи заготовок. Под действием давления в камере 18 золотник нижнего блока управления также перемещается, соединяя взводящую камеру 12 нижнего рабочего цилиндра через полость 21 и промежуточную камеру 23 со следящей камерой П. Жидкость от магистрали поступает во взводящую камеру 12 верхнего рабочего цилиндра, про- исходит разведение рабочих органов t, сопровождающееся дополнительным сжатием газа в силовых цилиндрах 1, а жидкость из следящей камеры 11 через промежуточную камеру 23 и по-. лость 22 того же цилиндра выталкивается в гидравлическую линию устройства автоматической подачи заготовок, которое перемещает заготовку в штамповое. пространство молота. Одновременно жидкость из следящей камеры 11 нижнего цилиндра синхронизации за счет жесткой связи рабо:чих органов Ц со штоками 7 через промежуточную камеру 23 и полость 21 выталкивается во взводящую камеру 12, осуществляя синхронизацию перемещения рабочих органов 4 в период взвода. После разведения рабочих органов if и окончания процесса подачи заготовки в щтамповре пространство .поступает сигнал управления на распределитель 19, который, перемещается в положение С и соединяет камеры 17 управления обоих блоков 13 управления со сливом. Под действием давле(ния жидкости в камере 18, дифференциальные золотники 14 и верхнего и нижнего блоков управления перемещаются и соединяют- взводящие 12 через полости 21 и промежуточные камеры 23 со следящими камерами 11. Под действием давления газа в силовых цилиндрах 1 рабочие органы разгоняются, а жидкость из взводящих камер 12 цилиндров синхронизации через полости 21 и промежуточные камеры 23 перетекает в следящие камеры 11, обеспечивая синхронизацию перемещения рабочих органов в период разгона. После выполнения рабочего хода, то есть после окончания процесса штамповки, поступает сигнал управления на распределитель 19,
который перемещается в положение Б и соединяет камеру 1 управления нижнего блока управления с напорной магистралью насосной станции 20, а камеру 17 управления верхнего блока управления со сливом, что позволяет в процессе работы молота обновлять жидкость в рабочих цилиндрах через цикл, исключая ее перегрев. Далее цикл повторяется.
Использование предлагаемого устройства позволит повысить КПД молота за счет исключения трубопроводов между следящими и взводящими камерами цилиндров синхронизации, а также качество поковок за счет выполнения цилиндров синхронизации и рабочих цилиндров раздельно, исключения возможности попадания газа в гидросистему устройства и, таким образом, улучшения синхронизации перемещения рабочих органов.
Кроме того, упрощается система управления предлагаемым устройством, что повышает его надежность. Формула изобретения
Высокоскоростной горизонтальный бесшаботный молот, содержащий размещенные Н.З раме два силовых цилиндра со средствами синхронизации и блоками управления перемещением рабочих органов, а также устройство автоматической подачи заготовок, отличающийся тем., что, с целью повышения КПД и качества поковок, упомянутые средства синхронизации выполнены в виде закрепленных на раме симметрично оси молота цилиндров с концентрично смонтированными в корпусе каждого из них и закрепленными на противоположных рабочих органах двумя штоками, один из которых выполнен полым, а другой - с поршнем в средней части, разделяющим корпус цилиндра на взводящую и следящую камеры, при этом каждый блок управления перемещением рабочих органов соединен со следящей и взводящей камерами соответствующего цилиндра синхронизации и с приводом устройства автоматической подачи заготовок.
Источники информации, п эинятые во внимание при экспертизе
1. Авторское свидетельство СССР № 659269, кл. В 21 J 7/28, 1977 (прототип)

| название | год | авторы | номер документа |
|---|---|---|---|
| Высокоскоростной горизонтальный штамповочный молот с двухсторонним ударом | 1977 |
|
SU732065A1 |
| Импульсный горизонтальный молот с двусторонним ударом | 1983 |
|
SU1110531A1 |
| ВЫСОКОСКОРОСТНОЙ МОЛОТ С ДВУСТОРОННИМ УДАРОМ | 2001 |
|
RU2185915C1 |
| Бесшаботный молот | 1983 |
|
SU1076174A1 |
| Высокоскоростной молот с двусторонним ударом | 1985 |
|
SU1263416A1 |
| Высокоскоростной горизонтальный молот с двухсторонним ударом | 1977 |
|
SU659269A1 |
| Бесшаботный молот | 1981 |
|
SU1152694A1 |
| Устройство управления бесшаботным молотом | 1986 |
|
SU1362557A1 |
| Горизонтальный бесшаботный молот | 1982 |
|
SU1038043A1 |
| ГОРИЗОНТАЛЬНЫЙ БЕСШАБОТНЫЙ МОЛОТ | 2000 |
|
RU2200072C2 |