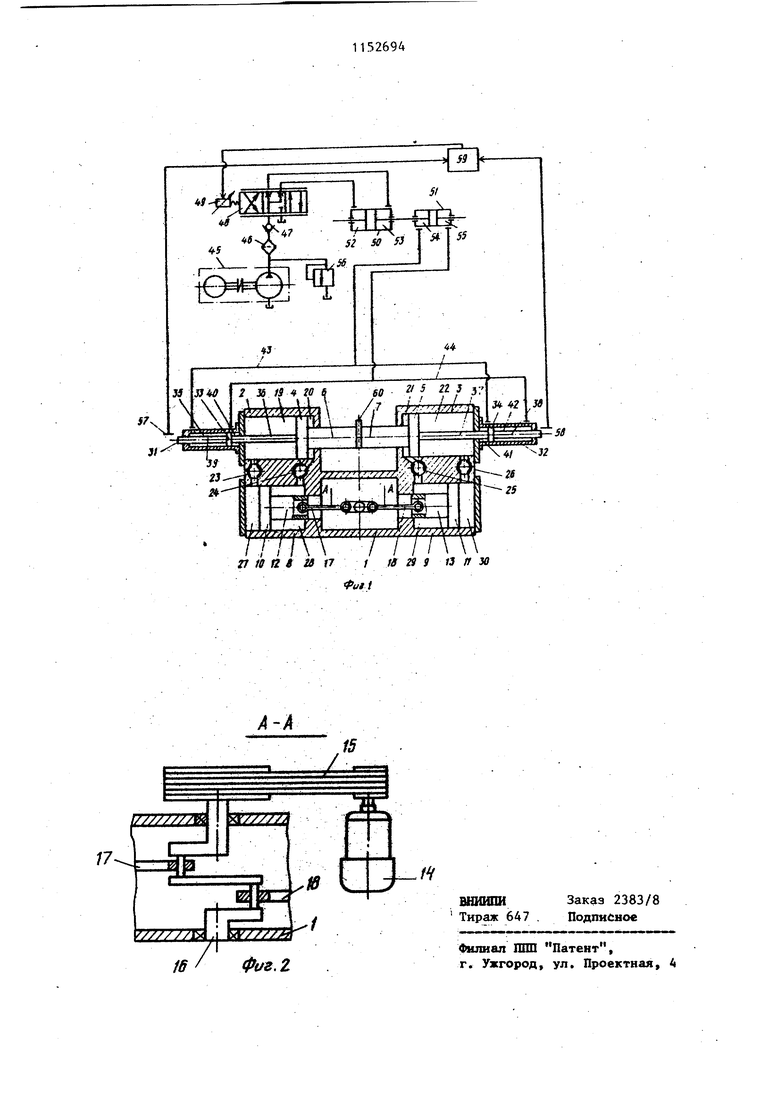
Изобретение относится к машино строению, а именно к конструкциям бе шаботных молотов. Цель изобретения - расширение технологических возможностей путем повьпиения точности перемещения порщней. На фиг. 1 показана принципиальная схема молота, общий вид} на . 2 разрез А-А на фиг. t. Молот содержит смонтированные на станине 1 силовые щ линдры 2, 3с поршнями 4, 5 со штоками 6, 7, ijecyщими инструменты, а также приводные цилиндры 8, 9 с поршнями 10, t1 со. штоками 12, 13, соединенными с приводом 14 через ременную передачу 15 и кривошипно-шатунный механизм, вклю чающий кривоптпный вал 16 и шатуны 17 и 18. Полости 19-22 силовых хщлиндров 2, 3 соединены через распределительные краны 23-26 с полостями 27-30 приводных цилиндров 8 и 9. К силовым цилиндрам 2, 3 крепятся сийхронизирукицие цилиндры 31, 32 с порш нями 33 и 34, которые выполнены со штоками 35-38. Штоки 36 и 37 связаны соответственно с поршнями 4 и 5. Полости 39 и 40 цилиндра 31 соединены крест-накрест соответственно « полостями 41, 42 цилиндра 32 гидролиниями 43 и 44. Гидропривод содержит насос 45, на напорной магистц али которого установлен фильтр 46 и обратный клапан 47, следящий распределитель 48 с электромагнитом 49, а также гидравлические цилиндры 50, 5 штоки которых соединены собой Полости 52 и 53 цилиндра 50 соединены гидролиниями со следящим распределителем 48. Полости 54 и 55 цилиндра 51 соединены соответственно с гидролиниями 43 и 44. На напорной 1 42 магистрали насоса 45 установлен предохранительный клапан 56. Путевые датчики 57 и 58 установлены с возможностью взаимодействия со пггоками 38, 37 и соединены входом с блоком Управления 59, выход которого соединен с электромагнитом 49. Позицией 60 помечена заготовка. Молот работает следукщим образом. При вклниении привода 14 поршни 1Q и 11 совершают возвратно-поступательное перемещение и подают воздух через распределительные краны 23-26 в полости силовых цилиндров 2 и 3. Синхронизация движения поршней 4 и 5 обеспечивается синхронизирующими цилиндрами 31 и 32 за счет перетекания жидкости из их полостей по гидролиниям 43 и 44. В случае, если шток 6 движется, например, быстрее штока 7, сигнал рассогласоваш1я от путевых датчиков 57 и 58 поступает в блок управления 59, по сигналу которого электромаг- ИНТ 49 перемещает золотник следящего распределителя 48 и жидкость от насоса 45 поступает в полость 52 гидравлического цилиндра 50, в результате чего жидкость из полости 54 поступает в гидролинию 44 и полости 40 и 42 синхронизируняцих цилиндров 31 и 32, а из полостей 39 и 41 тех же цилиндров жидкость поступает в полость 54 цилиндра 50, в результате чего уменьшается рассогласование движения штоков 6 и 7. В случае, если поршень 11 движется быстрее, система срабатывает аналогичным образом, осуществляя подачу и отбор жидкости из соответствукяцих полостей синхронизирующих цилиндров. Экономический эффект при внедрег НИИ изобретения д./стигается за счет расширения технологических возможностей.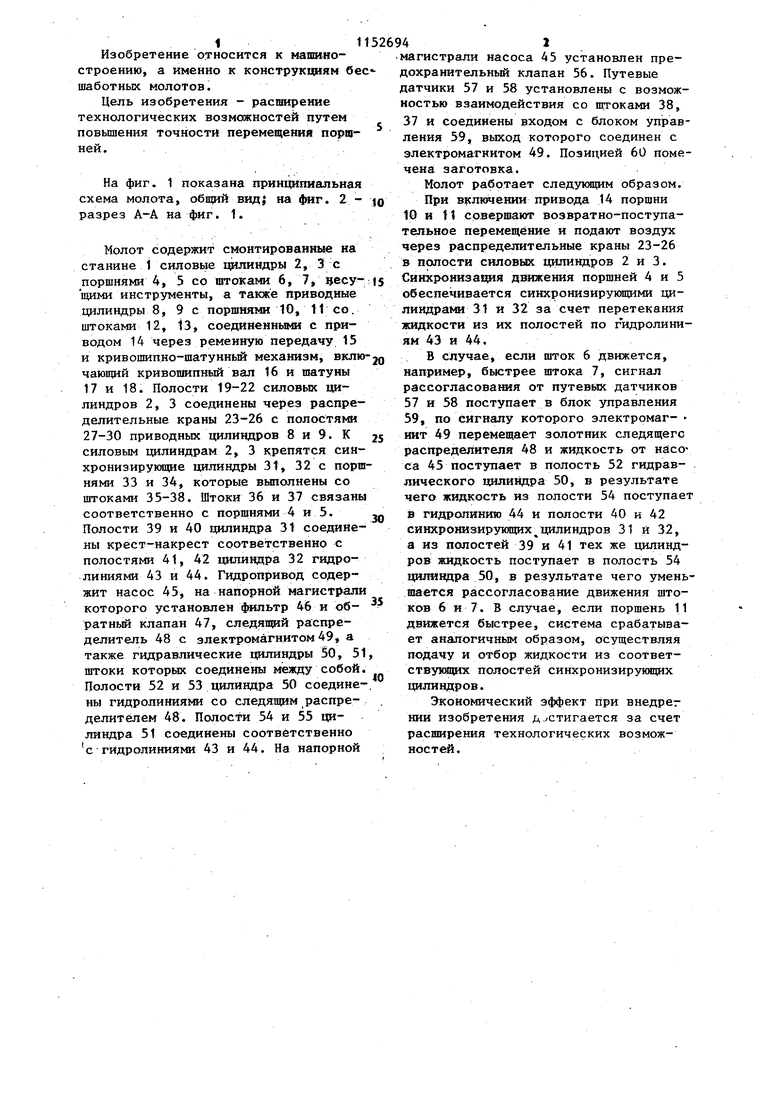
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесшаботный молот | 1983 |
|
SU1076174A1 |
| Бесшаботный молот | 1981 |
|
SU1026916A1 |
| Система синхронизации движения траверс гидравлического пресса | 1984 |
|
SU1172747A1 |
| Система синхронизации бесшаботного молота с соосно смонтированными на станине рабочими цилиндрами с установленными в них поршнями и штоками с узлами крепления инструмента | 1981 |
|
SU988436A1 |
| Механогидравлический привод кузнечно-прессовой машины | 1982 |
|
SU1071454A1 |
| Источник сейсмических сигналов | 1989 |
|
SU1755225A1 |
| Гидравлическая силовая система рулевого управления | 1982 |
|
SU1195922A3 |
| Гидравлический привод с путевым управлением | 1981 |
|
SU954645A1 |
| Устройство для автоматического поддержания стабильной частоты вращения синхронного генератора | 1979 |
|
SU855298A1 |
| Гидравлическая система управления механизмами транспортного средства | 1987 |
|
SU1504142A1 |
БЕСШАБОТНЬЙ МОЛОТ, содержащий соосно смонтированные на станине силовые цилиндры с размещенными в них поршнями со, штоками, несущими инструмент, привод, включающий кривошип но-шатунный механизм, связанный с поршнями приводных цилиндров, соединенных своими полостями через распределительные краны с полостями силовых цилиндров, а также синхронизирующие цилиндры, полости которых заполнены жидкостью и соединены гидролиниями между собой крест-накрест, а штоки - с поршнями силовых цилиндров, о тли чающийся тем, что, с целью расширения технологических возможностей путем повышения точности перемещения поршней -силовых цилиндров, он снабжен гидроприводом, включающим насос и соединенный с ним следящий распределитель с электромагнитом для перемещения его золотника двумя гидравлическими цилиндрами, в каждом изкоторых смонтирован поршень с двухсторонним штоком, образующий в этом цилиндре две полости, а также блоком управления с путевыми датчиками, при этом полости одного из гидравлических цилиндров с двух(Л сторонним штоком подключены к гидролиниям, соединяющим полости синхронизирующих цилиндров, а другого к следящему распределителю, упомянутые двухсторонние, штоки связаны между собой, путевые датчики установлены с возможностью взаимодействия со штоками синхронизирующих цилиндров, а блок управления соединен своими ел входами с путевьми датчиками, а выкэ ходом - с электромагнитом следящего 10) распределителя. со 4
| ВЫСОКОСКОРОСТНОЙ молот | 0 |
|
SU222140A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Авторское свидетельство СССР по заявке № 3325401/25-27, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
