(S) УПРАВЛЯЕМЫЙ КРИВОЦИПНО-ШАТУННЫЙ МЕХАНИЗМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый кривошипно-шатунный механизм | 1977 |
|
SU660852A1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| Устройство для изменения хода поршня насоса в ветронасосной установке | 1949 |
|
SU89674A1 |
| Зубодолбежный станок | 1986 |
|
SU1518092A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Управляемый вспомогательный кривошипный механизм кривошипной кузнечно-прессовой машины | 1985 |
|
SU1258710A1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1971 |
|
SU301285A1 |
| МЕХАНИЗМ РЕГУЛИРОВКИ ХОДА ПОЛЗУНА КРИВОШИПНОГО ПРЕССА | 2002 |
|
RU2223862C2 |
| Вертикальная кузнечно-прессовая машина | 1986 |
|
SU1425093A1 |
| РЕДУКТОР СТАНКА-КАЧАЛКИ | 1993 |
|
RU2075673C1 |

1
Изобретение относится к машиностроению, а именно к конструкциям управляемых кривошипно-шатунных механизмов механических прессов.
Известен управляемый кривошипношатунный механизм, содержащий смонтированный в станине с возможностью вращения корпус со ступицей, зубчатым венцом, связанным с шестерней приводного вала, и направляющими, сочлененную с кривошипом смонтированную в направляющих ползушку, в которой выполнена внутренняя резьбовая нарезка, зубчатую передачу, соединенную одним звеном с помощью регулировочного вала с узлом изменения эксцентриситета кривошипа, а другим - с винтом, связанным нарезкой с ползушкой tl}.
Недостатком известного устройства является наличие дифференциального редуктора, что усложняет конструкцию механизма.
Цель изобретения - упрощение конструкции.
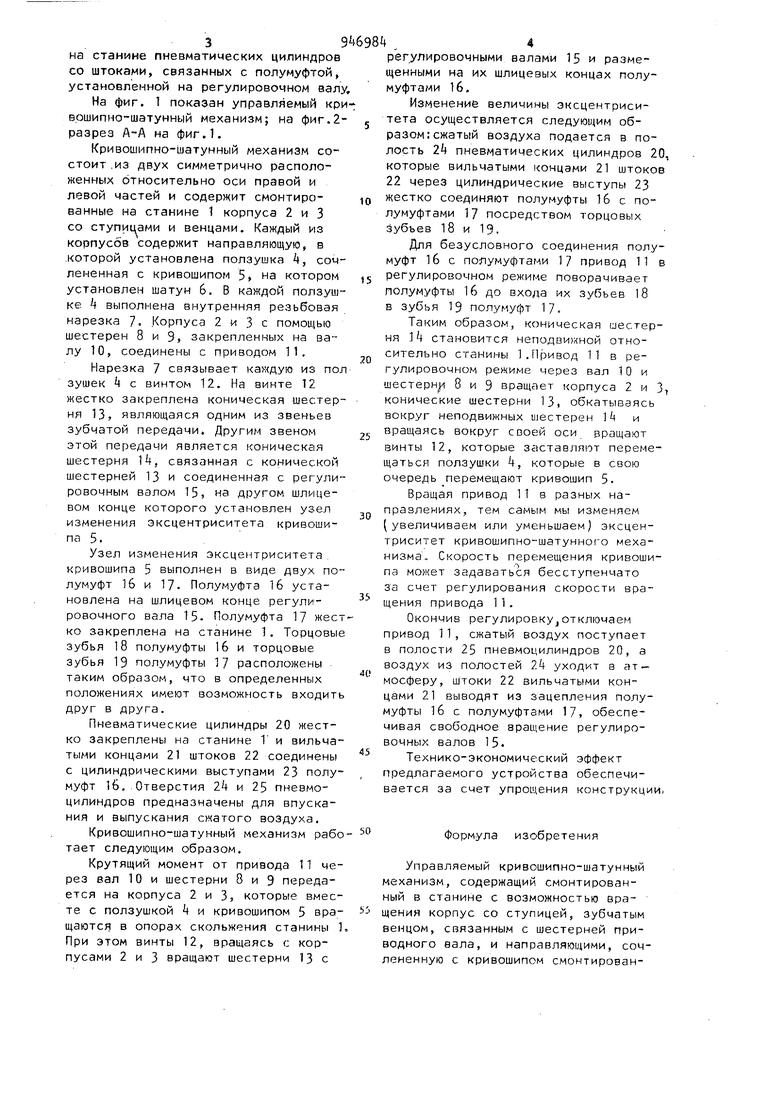
Поставленная цель достигается тем, что в управляемом кривошипношатунном механизме, содержащем смонтированный в станине с возможностью вращения корпус со ступицей, зубчатым венцом, связанным с шестерней приводного вала, и направляющими, сочлененную с кривошипом смонти10рованную в направляющих ползушку, в которой выполнена внутренняя резьбовая нарезка, зубчатую передачу, соединенную одним звеном с помощью регулировочного вала с узлом измене15ния эксцентриситета кривошипа, а другим - с винтом, связанным нарезкой с ползушкой, узел изменения эксцентриситета кривошипа выполнен в виде двух полумуфт с торцовыми зубь20ями, одна из которых закреплена на станине, а другая установлена с возможностью осевого перемещения на регулировочном валу, и установленных 39 на станине пневматических цилиндров со штоками, связанных с полумуфтой, установленной на регулировочном валу На фиг, 1 показан управляемый кри вршипно-шатунный механизм; на фиг.2разрез А-А на фиг.1. Кривошипно-шатунный механизм состоит .из двух симметрично расположенных относительно оси правой и левой частей и содержит смонтированные на станине 1 корпуса 2 и 3 со ступицами и венцами. Каждый из корпусов содержит направляющую в .которой установлена попзушка k, сочлененная с кривошипом 5 на котором установлен шатун 6. В каждой ползушке -I выполнена внутренняя резьбовая нарезка 7. .Корпуса 2 и 3 с помощью шестерен 8 и 9, закрепленных на валу 10, соединены с приводом 11. Нарезка 7 связывает каждую из пол зушек k с винтом 12. На винте 12 жестко закреплена коническая шестер ня 13, являющаяся одним из звеньев зубчатой передачи. Другим звеном этой передачи является коническая шестерня 1, связанная с конической шестерней 13 и соединенная с регули ровочным валом 15, на другом шлицевом конце которого установлен узел изменения эксцентриситета кривошипа 5Узел изменения эксцентриситета, кривошипа 5 выполнен в виде двух по лумуфт 1б и 17. Полумуфта 1б установлена на шлицевом конце регулировочного вала 15. Полумуфта 17 жес ко закреплена на станине 1, Торцовы зубья 18 полумуфты 16 и торцовые зубья 19 полумуфты 17 расположены таким образом, что в определенных положениях имеют возможность входит друг в друга. Пневматические цилиндры 20 жестко закреплены на станине 1 и вильча тыми концами 21 штоков 22 соединены с цилиндрическими выступами 23 полу муфт 1б,.Отверстия 2k и 25 пневмоцилиндров предназначены для впускания и выпускания сжатого воздуха, Кривошипно-шатунный механизм раб тает следующим образом. Крутящий момент от привода 11 че рез вал 10 и шестерни 8 и 9 передается на корпуса 2 и 3, которые вмес те с ползушкой и кривошипом 5 вра--щаются в опорах скольжения станины 1, При этом винты 12, вращаясь с корпусами 2 и 3 вращают шестерни 13 с регулировочными валами 15 и размещенными на их шлицевых концах полумуфтами 16. Изменение величины эксцентриситета осуществляется следующим образом: сжатый воздуха подается в полость 2 пневматических цилиндров 20, которые вильчатыми концами 21 штоков 22 через цилиндрические выступы 23 жестко соединяют полумуфты 16 с полумуфтами 17 посредством торцовых зубьев 18 и 19. Для безусловного соединения полумуфт 1б с пояумуфтами 17 привод 11 в регулировочном режиме поворачивает лолумуфты 16 до входа их зубьев 18 в зубья 19 полумуфт 17. Таким образом, коническая шестерня 1 i становится неподои)хной относительно станины 1.Привод 11 в регулировочном режиме через вал 10 и шестерн 1 8 и 9 вращает корпуса 2 и 3, конические шестерни 13, обкатываясь вокруг неподвижных шестерен Ц и вращаясь вокруг своей оси вращают винты 12, которые заставляют перемещаться ползушки k, которые в свою очередь перемещают кривошип 5. Вращая привод 1I в разных направлениях, тем самым мы изменяем (увеличиваем или уменьшаем) эксцентриситет кривошипно-шатунного механизма.. Скорость перемещения кривошипа может задаваться бесступенчато за счет регулирования скорости вращения привода 11. Окончив регулировкуJотключаем привод 11, сжатый воздух поступает в полости 25 пневмоцилиндров 20, а воздух из полостей 2А уходит в атмосферу, штоки 22 вильчатыми концами 21 выводят из зацепления полумуфты 1б с полумуфтами 17, обеспечивая свободное вращение регулировочных валов 15, Технико-экономический эффект предлагаемого устройства обеспечивается за счет упрощения конструкции, Формула изобретения Управляемый кривошипно-шатунный механизм, содержащий смонтированный в станине с возможностью вращения корпус со ступицей, зубчатым венцом, связанным с шестерней приводного вала, и направляющими, сочлененную с кривошипом смонтированную в направляющих прлзушку, в которой выполнена внутренняя резьбовая нарезка, зубчатую передачу, соединенную одним звеном с помощью регулировочного вала с узлом изменения эксцентриситета кривошипа, а другим с винтом, связанным нарезкой с ползушкой.отличающийся тем, что, с целью упрощения конструкции, узе/1 изменения эксцентриситета кривошипа выполнен в виде двух полумуфт с торцовыми зубьями, одна
из которых закреплена на станине, а другая установлена с возможностью осевого перемещения на регулировочном валу, и установленных на станине пневматических цилиндров со штоками, связанных с полумуфтой, установленной на регулировочном валу.
Источники информации, принятые во внимание при экспертизе
„ Авторское свидетельство СССР tf 660852, кл. В 30 В 15/1 (прототип).
