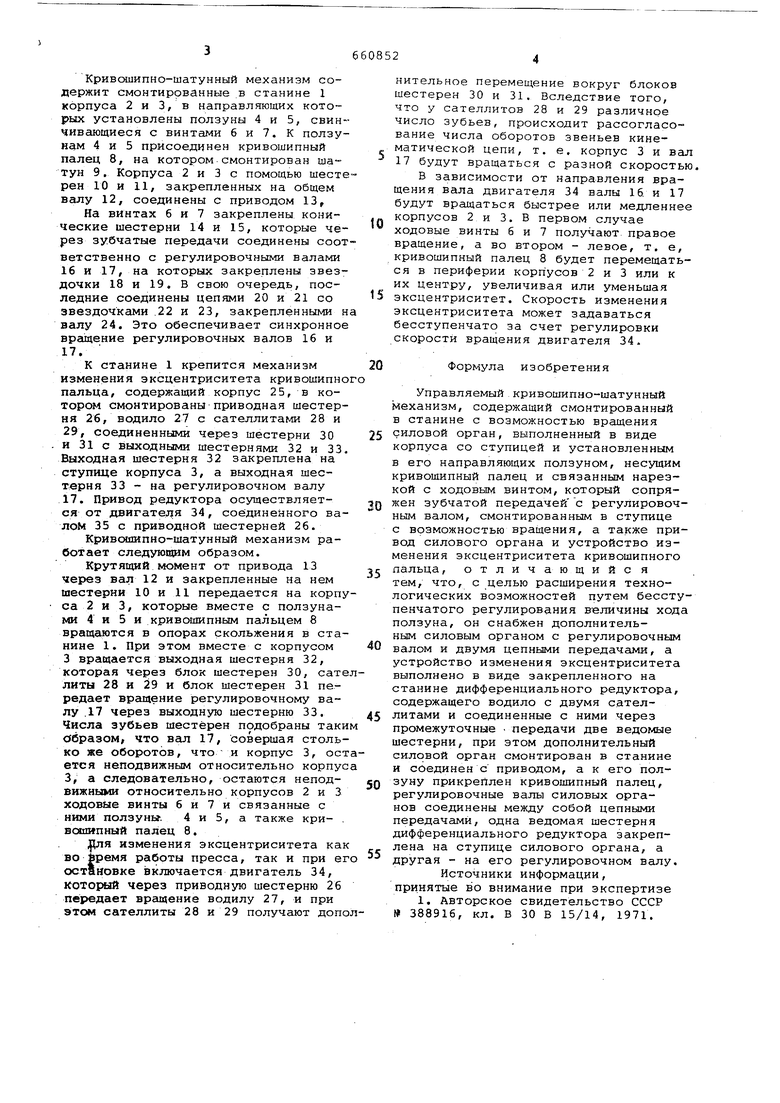
Изобретение относится к области Мсшиностроения, а именно к конструкциям управляемых кривошипно-шатунных механизмов. Известен управляемый кривошипношатунный механизм, содержащий смонтированный в станине с возможностью вращения силовой орган, выполненный в виде корпуса со ступицей и установ ленным в его направляющих ползуном, несущим кривошипный палец и связанным нарезкой с ходовым винтом, кото рый сопряжен зубчатой передачей с регулировочным валом, смонтированным в ступице с возможностью вращения, а также привод силового органа и устройство изменения эксцентриситет кривошипного пальца 1. В известном устройстве возвратно поступательное движение подвижных частей пресса осуществляется при не рывном вращении корпуса, а изменени эксцентриситета кривошипного пальца достигается при переключении зубчатой муфты. Однако в известном устройстве кривошипный палец находится на консоли, а изменение эксцентриситета кривошипного пальца осуществляется только при вращении корпуса, что резко уменьшает его технологические возможности . Цель изобретения - расширение технологических возможностей механизма путем бесступенчатого регулирования величины хода ползуна. Цель достигается тем, что устройство снабжено дополнительным силовЕлм органом с регулировочным валом и двумя цепными передачами, а устройство изменения эксцентриситета кривошипного пальца выполнено в виде закрепленного на станине дифференциального редуктора, содержащего водило с двумя сателлитами и. соединенные с ними через промежуточные передачи две ведомые шестерни, при этом дополнительный силовой орган смонтирован в станине и соединен с приводом, а к его ползуну прикреплен кривошипный палец, регулировочные валы силовых органов соединены между особой цепными передачами, одна ведомая шестерня дифференциального редуктора закреплена на ступице силового органа, а другая - на его регулировочном валу. На фиг. 1 показан предлагаемый механизм, общий вид; на фиг. 2 - разрез А-А фиг. 1. Кривошипно-шатунный механизм содержит смонтиррванные в станине 1 корпуса 2 и 3, в направляющих которых установлены ползуны 4 и 5, свинчивающиеся с винтами 6 и 7. К ползунам 4 и 5 присоединен кривошипный палец 8, на котором смонтирован шатун 9. Корпуса 2 и 3 с помощью шесте рен 10 и 11, закрепленных на общем валу 12, соединены с приводом 13, На винтах 6 и 7 закреплены конические шестерни 14 и 15, которые через зубчатые передачи соединены соот ветственно с регулировочными валами 16 и 17, на которых закреплены звездочки 18 и 19. В свою очередь, последние соединены цепями 20 и 21 со звездочками .22 и 23, закрепленными н валу 24. Это обеспечивает синхронное вращение регулировочных валов 16 и 17. К станине 1 крепится механизм изменения эксцентриситета кривошипно пальца, содержащий корпус 25, в котором смонтированы приводная шестер ня 26, водило 27 с сателлитами 28 и 29, соединенными через шестерни 30 и 31 с выходными шестернями 32 и 33 Выходная шестерня 32 закреплена на ступице корпуса 3, а выходная шестерня 33 - на регулировочном валу 17. Привод редуктора осуществляется от двигателя 34, соединенного ва лоМ 35 с приводной шестерней 26. Кривошипно-шатунный механизм работает следуюпдам образом. Крутящий момент от привода 13 через вал 12 и закрепленные на нем шестерни 10 и 11 передается на корп са 2 и 3, которые вместе с ползунами 4 и 5 и кривошипным пальцем 8 вращаются в опорах скольжения в ста нине 1. При этом вместе с корпусом 3 вращается выходная шестерня 32, которая через блок шестерен 30, сат литы 28 и 9 и блок шестерен 31 передает вращение регулировочному валу .17 через выходную шестерню 33. Числа зубьев шестерен подобраны так Образом что вал 17, совершая столь ко же оборотов, что - и корпус 3, ос ется неподвижным относительно корпу 3, а следовательно, остаются неподвижными относительно корпусов 2 и 3 ходовые винты 6 и 7 и связанные с ними ПОЛЗУНЫ . 4 и 5, а также кривошипный палец 8. Для изменения эксцентриситета ка во время работы пресса, так и при е остаиовке включается двигатель 34, который через приводную шестерню 26 передает вращение водилу 27, и при этом сателлиты 28 и 29 получают доп кительное перемещение вокруг блоков шестерен 30 и 31. Вследствие того, что у сателлитов 28 и 29 различное число зубьев, происходит рассогласование числа оборотов звеньев кинематической цепи, т. е, корпус 3 и вал 17 будут врататься с разной скоростью. В зависимости от направления вращения вала двигателя 34 валы 16. и 17 будут вращаться быстрее или медленнее корпусов 2 и 3. В первом случае ходовые винты 6 и 7 получают, правое вращение, а во втором - левое, т. е, кривошипный палец 8 будет перемещаться в периферии корпусов 2 и 3 или к их центру, увеличивая или уменьшая эксцентриситет. Скорость изменения эксцентриситета может задаваться бесступенчато за счет регулировки скорости вращения двигателя 34. Формула изобретения Управляемый кривошипно-шатунный механизм, содержащий смонтированный в станине с возможностью вращения силовой орган, выполненный в виде корпуса со ступицей и установленным в его направляющих ползуном, несущим кривощипвый палец и связанным нарезкой с ходовым винтом, который сопряжен зубчатой передачей с регулировочным валом, смонтированным в ступице с возможностью вращения, а также привод силового органа и устройство изменения эксцентриситета кривошипного пальца, отличающийся тем, что, с целью расширения технологических возможностей путем бесступенчатого регулирования величины хода ползуна, он снабжен дополнительным силовым органом с регулировочным валом и двумя цепньлми передачами, а устройство изменения эксцентриситета выполнено в виде закрепленного на станине дифференциального редуктора, содержащего водило с двумя сателлитами и соединенные с ними через промежуточные передачи две ведомые шестерни, при этом дополнительный силовой орган смонтирован в станине и соединен с приводом, а к его ползуну прикреЛлен кривошипный палец, регулировочные валы силовых органов соединены между собой цепными передачами, одна ведомая шестерня дифференциального редуктора закреплена на ступице силового органа, а другая - на его регулировочном валу. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 388916, кл. В 30 В 15/14, 1971.
S S 11
n
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый кривошипно-шатунный механизм | 1980 |
|
SU946984A1 |
| Горизонтальный правильный пресс | 1983 |
|
SU1123758A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| Пресс-полуавтомат | 1977 |
|
SU659406A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ И НАОБОРОТ | 2005 |
|
RU2310115C2 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| УПРАВЛЯЕМЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 1973 |
|
SU388916A1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| Горизонтальный правильный пресс | 1984 |
|
SU1237273A1 |
| Механизм регулировки закрытой высоты пресса | 1975 |
|
SU541683A1 |

