(5) МАНИПУЛЯТОР ДЛЯ СБОРА И ПОГРУЗКИ ЛЕСОМАТЕРИАЛОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2002 |
|
RU2202877C1 |
| Машина для заготовки пневой древесины | 1979 |
|
SU869682A1 |
| Погрузчик | 1976 |
|
SU652106A1 |
| Погрузчик для лесоматериалов | 1984 |
|
SU1266770A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Лесозаготовительная машина | 1983 |
|
SU1132857A1 |
| ЧЕЛЮСТНОЙ ПОГРУЗЧИК-ИЗМЕЛЬЧИТЕЛЬ | 1991 |
|
RU2025948C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2127038C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Устройство для сбора и обработки лесосечных отходов | 1976 |
|
SU582782A1 |
1
Изобретение относится к машинам, предназначенным для сбора и погрузки лесоматериалов, преимущест-. венно сучьев и вершин, на сплошных рубках.
Известен манипулятор для сбора и погрузки лесоматериалов, содержащий монтируемую на самоходном шасси поворотную телескопическую стрелу, несущую шарнирно закрепленный на ней грейферный захват 1.
Недостаток манипулятора состоит в том, что грейферный захват, шарнирно подвешенный на стреле, трудно управляем и имеет низкую производительность.
Цель изобретения - расширение функциональных возможностей манипулятора ..
Для этого грейферный захват смонтирован на вершине V-образного рычага, одно плечо которого связано с выдвижной секцией стрелы, а другое посредством силового цилиндра связаНО с концом стрелы. При этом одна из челюстей захвата может быть подпружинена, а другая связана с приводом ее перемещения.
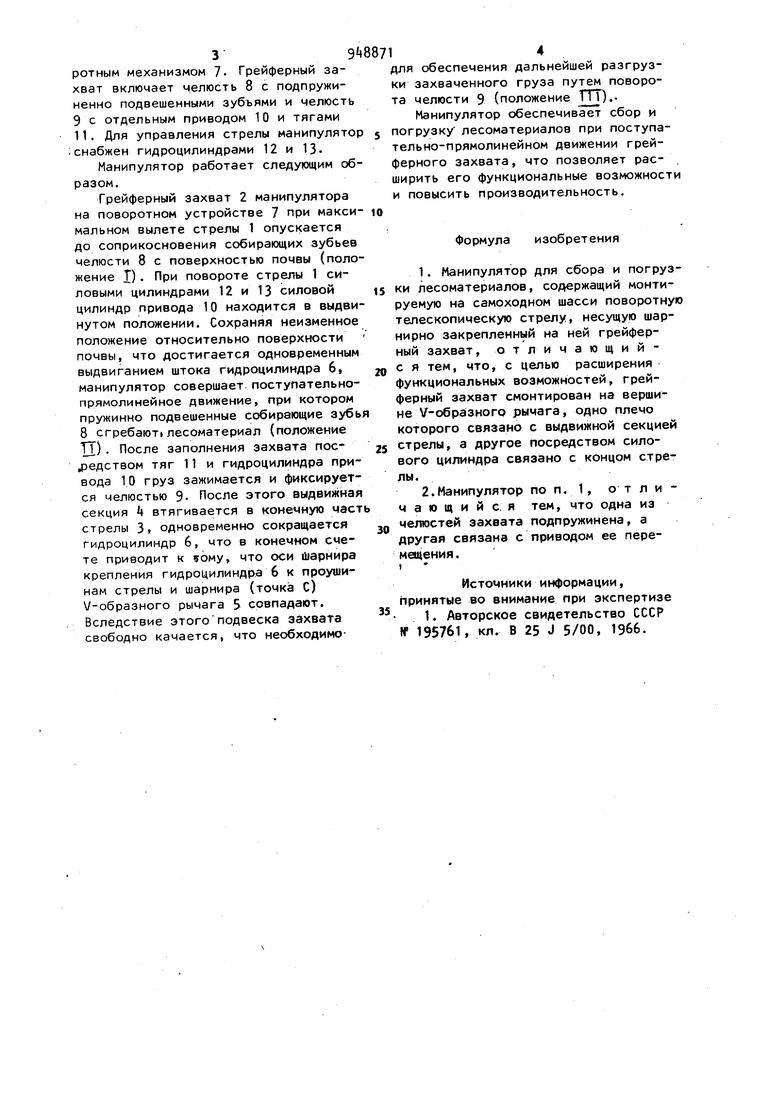
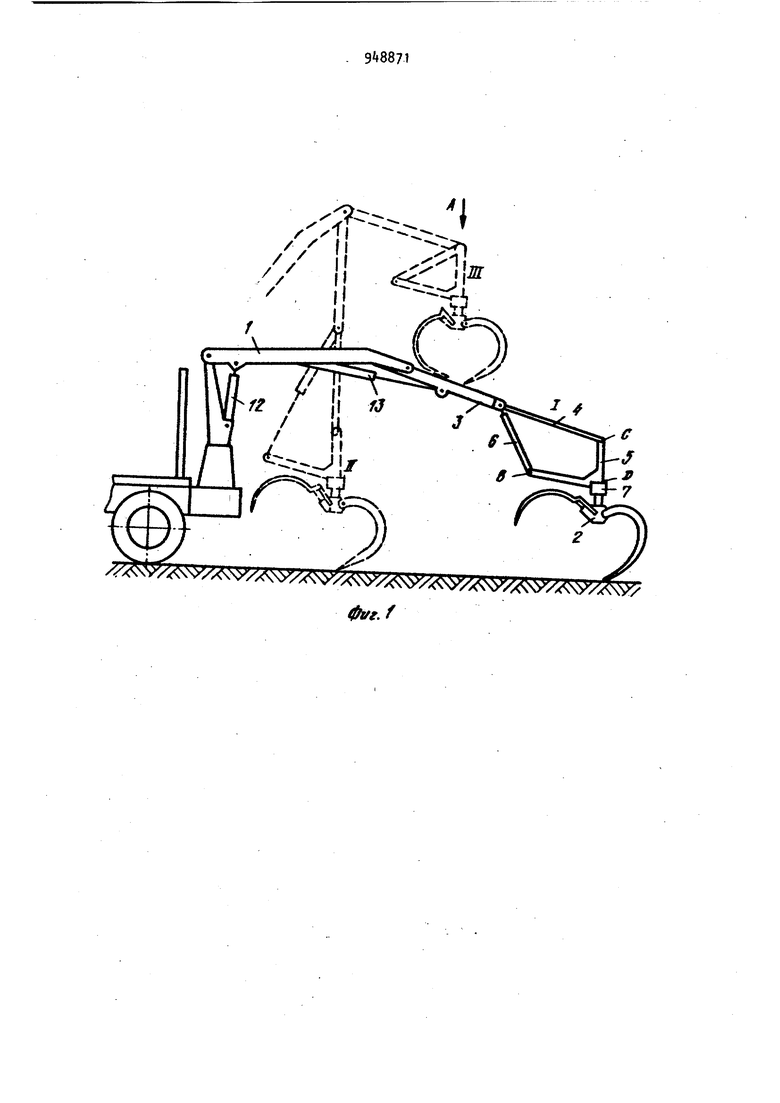
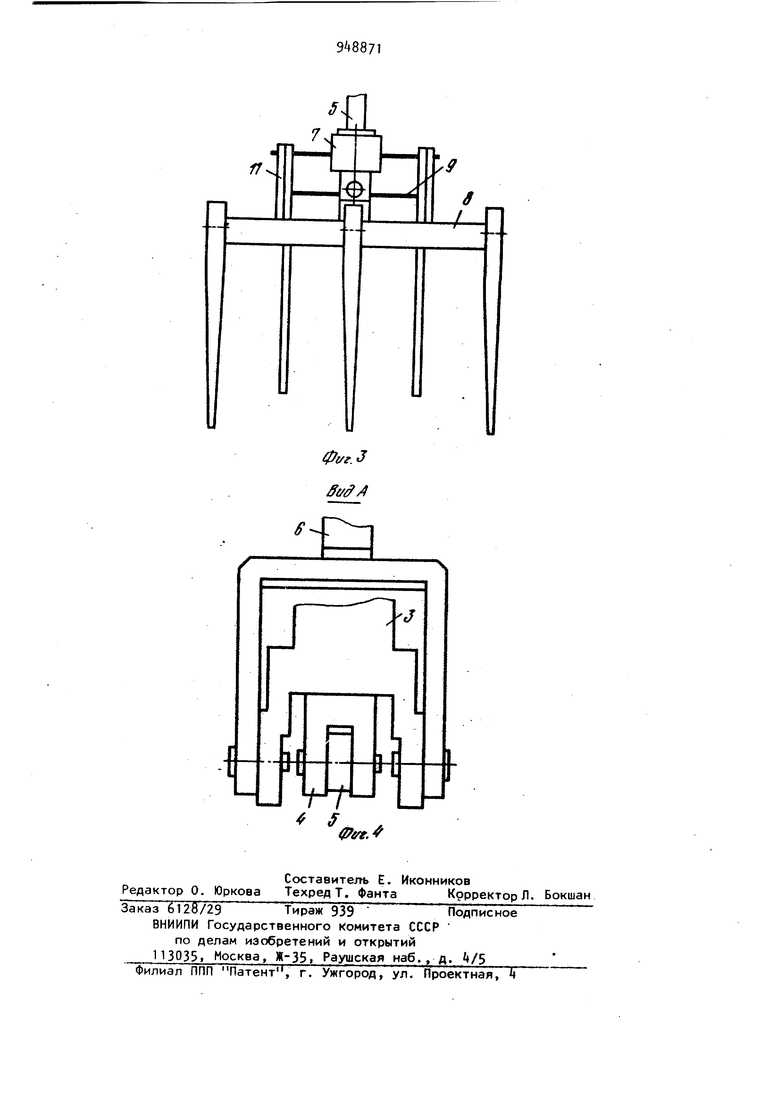
На фиг. 1 изображен предлагаемый , манипулятор, общий вид; на фиг. 2 грейферный захват; на фиг. 3 то же вид сбоку; на фиг. k - вид по стрелке А на фиг. 1.
Манипулятор для сбора и погрузки лесоматериалов, монтируемый на самоходном шасси, снабжен стрелой 1 с грейферным захватом 2. Конечная часть 3 стрелы 1 имеет выдвижную секцию . Грейферный захват 2 подвешен посредством V-образного рычага 5i который имеет точки прикрепления В, С и D, образующие треугольник. Один конец гидроцилиндра 6 шарнирно соединен с проушинами на стреле, а другой - с точкой В V-образного рычага. Рычаг вершиной С шарнирно соединен с концом выдвижной секции 4, а в точке D жестко связан с поворотным механизмом 7. Грейферный захват включает челюсть 8 с подпружиненнс подвешенными зубьями и челюсть 9с отдельным приводом 10 и тягами 11. Для управления стрелы манипулято iснабжен гидроцилиндрами 12 и 13Манипулятор работает следующим об разом. Грейферный захват 2 манипулятора на поворотном устройстве 7 при макси мальном вылете стрелы 1 опускается до соприкосновения собирающих зубьев челюсти 8 с поверхностью почвы (поло жение Т). При повороте стрелы 1 силовыми цилиндрами 12 и 13 силовой цилиндр привода 10 находится в выдви нутом положении. Сохраняя неизменное положение относительно поверхности почвы, что достигается одновременным выдвиганием штока гидроцилиндра 6, манипулятор совершает поступательнопрямолинейное движение, при котором пружинно подвешенные собирающие зубь 8 сгребают лесоматериал (положение ТТ). После заполнения захвата пос зедством тяг 11 и гидроцилиндра привода 10 груз зажимается и фиксируется челюстью 9- После этого выдвижная секция втягивается в конечную част стрелы 3 одновременно сокращается гидроцилиндр 6, что в конечном счете приводит к уому, что оси шарнира крепления гидроцилиндр.а 6 к проушинам стрелы и шарнира (точка С) V-образного рычага 5 совпадают. Вследствие этогоподвеска захвата свободно качается, что необходимоДЛЯ обеспечения дальнейшей разгрузки захваченного груза путем поворота челюсти 9 (положение 11J).. Манипулятор обеспечивает сбор и погрузку лесоматериалов при поступательно-прямолинейном движении грейферного захвата, что позволяет расширить его функциональные возможности и повысить производительность. Формула изобретения 1. Манипулятор для сбора и погрузки лесоматериалов, содержащий монтируемую на самоходном шасси поворотную телескопическую стрелу, несущую шарнирно закрепленный на ней грейферный захват, отличающийс я тем, что, с целью расширения функциональных возможностей, грейферный захват смонтирован на вершине V-образного рычага, одно плечо которого связано с выдвижной секцией стрелы, а другое посредством силового цилиндра связано с концом стрелы. 2.Манипулятор по п. 1, отличающийся тем, что одна из челюстей захвата подпружинена, а другая связана с приводом ее перемещения . I Источники информации, принятые во внимание при экспертизе К Авторское свидетельство СССР W 195761, кл. В 25 J 5/00, 1966. й/л f
// // //
О
17
Фс/е.З ffv
