(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ГОРНОГО КОМБАЙНА ПО ГИПСОМЕТРИИ ПЛАСТА
1
Изобретение относится к автоматизации . горных машин, в частности к автоматизации их направленного вождения в соответствии с гипсометрией пласта.
По основному авт. св. № 601414 известно устройство, осуш,ествляюш,ее способ ав- 5 томатического вождения горного комбайна по гипсометрии пласта, основанный на распознавании границ раздела пласта по цвету и контрастности. Устройство содержит источник света, через объектив освещающий jg участок пласта с контролируемым прослойком породы, фотоэлементом, воспринимающий отраженный световой поток через объектив, узел сканирования, синхронизатор, усилитель, сервомеханизм, задатчик допустимой точности ведения комбайна, схему срав- 5 нения, схему оперативного запоминания и сравнения видеоимпульсов и схему выработки команд управления. Выходной сигнал с фотоэлемента через усилитель поступает на схему оперативного запоминания и срав- 2о нения видеоимпульсов, которая подключена к сервомеханизму, кинематически связанному с объективом и электрически - со схемой сравнения, к которой подключен задатчик допустимой точности вождения комбайна. Выход схемы сравнения соединен со схемой выработки команд управления на изменение положения исполнительного органа комбайна. Синхронная работа узла сканирования и схемы оперативного запоминания и сравнения видеоимпульсов осуществляется синхронизатором. Команды на изменение положения исполнительного органа, поступающие со схемы выработки команд управления, представляют последовательность импульсов. Длительность и частота повторения импульсов определяют профиль кровли и почвы выработки, образуемый исполнительным органом комбайна. Для получения плавного профиля необходимо уменьщать длительность и частоту импульсов а для повышения быстродействия системы - увеличивать длительность и частоту импульсов. Выбор параметров команд управления определяется характером гипсометрии пласта и практически приемлемой частотой управления исполнительным органом.
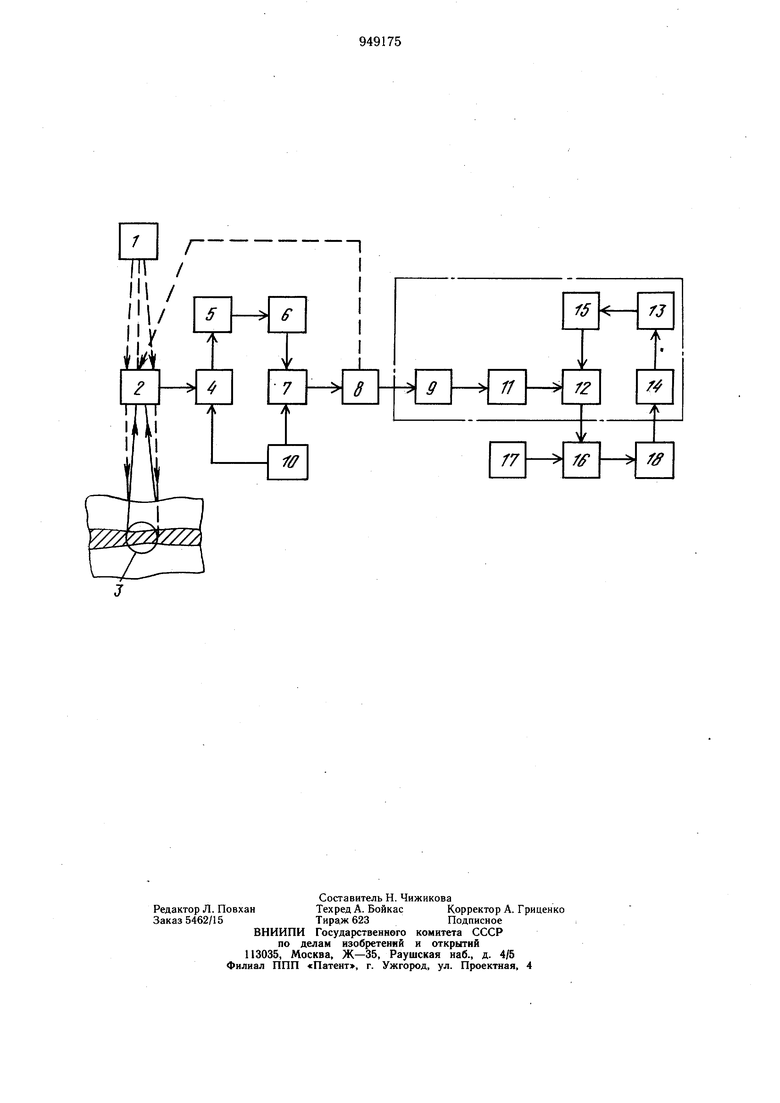
В известном устройстве команда управления на изменение положения исполнительного органа поступает при отклонении комбайна в профиле пласта от заданного направления на определенную величину, т. е. на комбайн поступают команды на отработку всех колебаний гипсометрии пласта, превышающих уровень задатчика точности. Изменение рельефа пласта носят случайный характер, т. е. различаются по знаку, величине и форме. Устройство отрабатывает значительную часть спектра частот, которыми обладает профиль пласта. Сглаживаются лишь только мелкомасштабные колебания с длинной волны в несколько сантиметров, укладываюш.ихся на площади освещаемого участка пласта, а также колебания с амплитудой, не превышающей уровень задатчика точности. Выбранное, с целью онтимального слежения за изменением гипсометрии пласта, быстродействие системы автоматического управления приводит к тому, что большая часть колебаний гипсометрии пласта воспринимается или полностью отрабатывается исполнительным органом комбайна 1. В условиях неспокойной гипсометрии залегания пласта отработка значительной части спектра колебаний профиля пласта приводит к тому, что вследствие расположения фотоэлектрического датчика на некотором расстоянии от исполнительного органа комбайна в данный момент времени производится отработка профиля пласта не соответствующего его действительной гипсометрии, что снижает качество проводимой выработки. Отрабатываемый профиль почвы выработки, по которой предстоит движение комбайну, не соответствует нормальным условиям эксплуатации очистного комплекса при выбранных оптимальных командах равления. При гипсометрии пласта, представляющей колебательный процесс значительной амплитуды, нарушается работоспособность системы. Отмеченные недостатки не устраняются подбором параметров команд управления. Целью изобретения является повышение точности вождения комбайна за счет обеспечения оптимизации траектории его движения в соответствии с гипсометрией пласта, а также повышение качества проводимой выработки. Поставленная цель достигается тем, что устройство снабжено датчиком и преобразователем перемещения, интегратором, датчиком и преобразователем скорости подачи, при этом датчик перемещения кинематически соединен с сервомеханизмом и электрически с входом преобразователя перемещения, а датчик скорости подачи - кинематически с горным комбайном и электрически с входом преобразователя скорости подачи, причем выходы преобразователей перемещения и скорости подачи соединены соответствующими входами интегратора, выход которого соединен с входом схемы сравнения. Датчик перемещения совместно с преобразователем перемещения в напряжение производит преобразование изменения гипсометрии пласта по простиранию выработки в соответствующее изменение напряжения во времени. Интегратор производит усреднение напряжения с выхода преобразователя перемещения в напряжение с постоянной времени, соответствующей оптималь.ной траектории движения горного комбайна. Датчик скорости подачи совместно с преобразователем скорости подачи в напряжение корректирует постоянную интегрирования интегратора в соответствии со скоростью продвижения комбайна и переводит интегратор в режим хранения усредненного значения напряжения при остановке комбайна. Команда на управление гидродомкратами поступает в случае отклонения комбайна в профиле пласта от усредненной траектории прослойка на величину, превышающую заданную точность вождения комбайна. На чертеже представлена блок-схема устройства. Источник 1 света через объетив 2 освещает участок пласта 3 с контролируемым прослойком породы, отличающимся по цвету от основного пласта. Отраженный световой поток через узел 4 сканирования поступает на фотоэлемент 5, который соединен с усилителем 6. Усилитель 6 подключен к схеме 7 оперативного запоминания и сравнения видеоимпульсов, которая соединена с сервомеханизмом 8, кинематически связанным с объективом 2 и датчиком 9 перемещения. Синхронизатор 10 подключен к узлу 4 сканирования и схеме 7 оперативного запоминания и сравнения видеоимпульсов. Датчик 9 перемещения электрически связан с преобразователем 11 перемещения, выход которого соединен со входом интегратора 12. Датчик 13 скорости подачи кинематически связан с комбайном 14 и электрически с преобразователем 15 скорости подачи в напряжение, выход которого подключен к управляющему входу интегратора 12. Выход интегратора 12 соединен с входом схемы 16 сравнения, на другой вход которой поступает сигнал от задатчика 17 допустимой точности ведения комбайна, а выход схемы сравнения - схемой 18 выработки команд управления, сигналы с которой поступают на изменение положения исполнительного органа комбайна 14. Устройство работает следующим образом. В момент нахождения комбайна точно в заданном положении световой .поток, поступающий через объектив 2 на узел 4 сканирования, разделяется пополам. При этом изображение контролируемой полосы также разделяется пополам. Вследствие этого на монотонно изменяющемся участке спектральной характеристики фотоэлемента 5 формируются равные электрические сигналы (видеоимпульсы), которые через усилитель 6 поступают на схему 7 оперативного запоминания и сравнения, на выходе которой сигнал рассогласования равен нулю. Сервомеханизм 8 в этом случае остается в исходном положении. Синхронизатор 10 обеспечивает одновременную параллельность работы узла 4 сканирования и схемы 7 операТИВ1ЮГО запоминания и сравнения. При отклонении комбайна от контролируемого прослойка пласта 3 происходит смещение изображения контролируемой полосы в одну из половин плоскости изображения объекта 2, и на фотоэлементе 5 формируются сигналы разной величины, которые усиливаются усилителем 6. Схемой 7 оперативного запоминания и сравнения вырабатывается сигнал рассогласования, амплитуда которого зависит от величины смещения контролируемого прослойка пласта 3 в вертикальной плоскости относительно комбайна, а полярность определяет направление смещения. Этот сигнал поступает на сервомеханизм 8, который перемещает объектив 2 до тех пор, пока рассогласование не станет равным нулю, обеспечивая таким образом непрерывное автономное слежение за контролируемым прослойком пласта 3 независимо от положения комбайна. Объектив 2, кинематически связанный с сервомеханизмом 8, следуя за прослойком, описывает в пространстве траекторию, соответствующую гипсометрии залегания пласта. Датчик 9 перемещения может быть выполаен, например, в виде потенциометра, в котором подвижный средний вывод кинематически связан с сервомеханизмом, или в виде катушки индуктивности с подвижным сердечником. Подвижный элемент датчика 9 перемещения совершает те же движения что и объектив 2. Таким образом, датчик 9 перемещения несет параметрическую информацию о гипсометрии пласта, которая преобразуется в напряжение преобразователем 11 перемещения. Интегратор 12 усредняет сигнал с выхода преобразователя 11 перемещения. Схема 16 сравнения, представляюшая компаратор напряжения, производит сравнение выходного сигнала интегратора с сигналом задатчика 17 точности. При смещении комбайна относительно контролируемого прослойка на величину, больщую допустимой, определяемую задатчиком 17 точности ведения комбайна, схема 18 выработки команд управления подает сигналы на исполнительные органы комбайна 14, обеспечивая тем самым автоматическое движение комбайна по усредненной гипсометрии пласта. Постоянная интегрирования интегратора 12 выбирается с учетом оптимальной траектории движения комбайна в соответствии с гипсометрией пласта. Кроме того, постоянная интегрирования корректируется в соответствии со скоростью подачи комбайна на забой, а именно, с увеличением скорости подачи постоянной времени уменьщается. Датчик 13 скорости подачи совместно с преобразователем 15 скорости подачи осуществляет управление постоянной времени интегратора 12. При нулевой скорости подачи интегратор 12 переходит в режим хранения. Применение устройства позволяет увеличить срок эксплуатации комбайна за счет оптимизации траектории его движения согласно эксплуатационным требованиям, исключить применение ручного труда по управлению комбайном в вертикальной плоскости в условиях залегания пласта с неспокойной гипсометрией за счет повыщения надежности системы автоматического вождения, повысить содержание полезного компонента в руде и снизить затраты на обогащение за счет улучщекия качества проводимой выработки. . Формула изобретения Устройство автоматического вождения горного комбайна по гипсометрии пласта по авт. св. № 601414, отличающееся тем, что, с целью повышения точности вождения комбайна за счет обеспечения оптимизации траектории его движения в соответствии с гипсометрией пласта, оно снабжено датчиком и преобразователем перемещения, интегратором, датчиком и преобразователем скорости подачи, при этом датчик перемещения кинематически соединен с сервомеханизмом и электрически с входом преобразователя перемещения, а датчик скорости подачи - кинематически с горным комбайном и электрически с входом преобразователя скорости подачи, причем выходы преобразователей перемещения и скорости подачи соединены с соответствующими входами интегратора, выход которого соединен с входом схемы сравнения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 601414, кл. Е 21 С 35/24, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949174A2 |
| Способ автоматического вождения горного комбайна по гипсометрии пласта и устройство для его осуществления | 1975 |
|
SU601414A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU901514A1 |
| Способ автоматического управления комбайном и устройство для его осуществления | 1982 |
|
SU1084441A1 |
| ГОРНЫЙ ОЧИСТНОЙ КОМБАЙН | 1993 |
|
RU2065959C1 |
| Устройство для автоматического вождения горного комбайна относительно границы раздела двух твердых сред | 1980 |
|
SU941574A1 |
| Устройство для автоматического управления положением горнопроходческой машины в плане и профиле пласта | 1978 |
|
SU754060A1 |
| Способ слежения за положением видимой границы между пластом и породой и устройство для его осуществления | 1987 |
|
SU1476126A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ УГЛЕДОБЫВАЮЩИХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2130546C1 |