СХ)
4
4
2. Устройство автоматического управления комбайном, содержащее датчик положения комбайна в профиле пласта, соединенный с выходом блока сигнализации предельно допустимых отклонений и первым входом блока сравнения, второй вход которого соединен с выходом задатчика допустимой точности ведения комбайна, а выход подключен к входу блока управления исполнительным органом, датчиком пути и блоком отключения подачи комбайна, отличающееся тем, что оно дополнительно снабжено блоком определения угла проходимой складки, задатчиком величины угла, задатчиком длины пути, ключевым элементом, первым и вторым компараторами, первой и второй схемами совпадений, схемой ИЛИ и инвертором, при этом управляемый вход ключевого элемента соединен с выходом блока управления исполнительным органом, а управляющий вход
соединен с выходом первой схемы совпадений, первый вход которой подключен к выходу первого компаратора, а второй вход соединен с выходом блока сигнализации предельно допустимых отклонений и первым входом второй схемы совпадений, второй вход которой через инвертор соединен с выходом первого компаратора, а выход подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом второго компаратора, а выход подключен к входу блока отключения подачи комбайна, соответствующие входы первого компаратора подключены к выходам блока определения угла проходимой складки и задатчика величины угла, соответствующие входы второго компаратора подключены к выходам датчика пути и задатчика длины пути, а выход первой схемы совпадений подключен к управляющему входу датчика пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949175A2 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949174A2 |
| Способ автоматического вождения горного комбайна по гипсометрии пласта и устройство для его осуществления | 1975 |
|
SU601414A1 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU901514A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| Система автоматического управления исполнительными органами очистного комбайна в профиле пласта | 1978 |
|
SU740949A1 |
| СПОСОБ РАЗРАБОТКИ МОЩНЫХ ВЫБРОСООПАСНЫХ СОЛЯНЫХ ПЛАСТОВ СО СЛОЖНОЙ ГИПСОМЕТРИЕЙ ЗАЛЕГАНИЯ | 1991 |
|
RU2015329C1 |
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1982 |
|
SU1063998A1 |
1. Способ автоматического управления комбайном, заключающийся в измерении отклонения исполнительного органа комбайна от заданного положения в профиле пласта, сравнении отклонения с допуском на точность вождения комбайна и с предельно допустимым значением отклонения и выработке команд управления перемещением исполнительного органа, отличающийся тем, что, с целью повышения точности управления исполнительным органом в вертикальной плоскости при прохождении участков сложноскладчатого строения пластов, определяют угол падения крыла проходимой складки, сравнивают его с заданным, и при возникновении отклонения, превышающего предельно допустимое значение, отключают подачу комбайна немедленно при условии, что угол проходимой складки меньще заданного, а в случае, если угол проходимой складки больще заданного, прекращают подачу команд (Л управления перемещением исполнительного органа на отрезке пути, равном щирине сжатой складки, и если на этом отрезке отклонение не станет меньше допустимого, отключают подачу комбййна.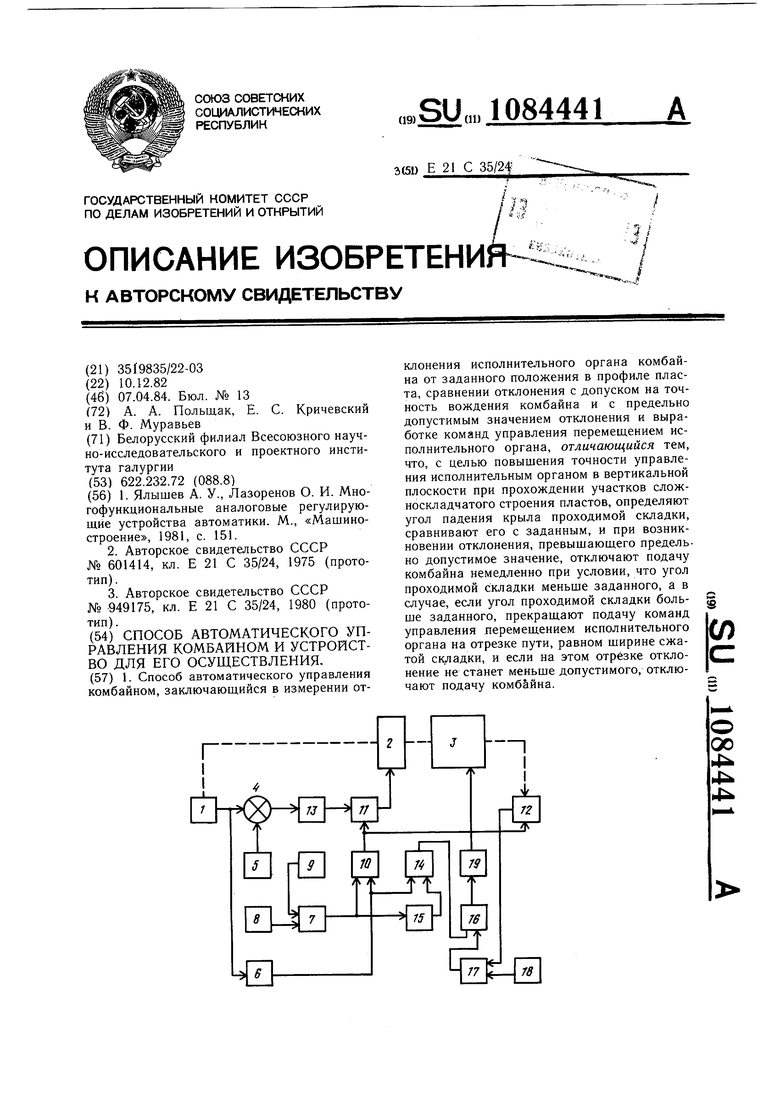
1
Изобретение относится к автоматизации горных машин, в частности к автоматизации управления движением комбайнов в профиле пласта.
Известны способы управления, применяемые в системах автоматического управления по одному параметру (сигналу ощибки), по которым при малых отклонениях регулируемого параметра формируют алгоритмы непрерывного или импульсного управления исполнительными органами, а при появлении сигнала ощибки, превышающего предельные отклонения, осуществляют дополнительную звуковую или световую сигнализации, блокировку соответствующих цепей управления, ввод в работу цепей технологических защит 1.
Для технологической защиты при управлении комбайном в профиле пласта служит цепь отключения подачи. Таким образом, реализация способа приводит к отключению подачи комбайна при каждом отклонении комбайнов в профиле пласта, превышающем заданные допуски, поэтому применение такого способа управления комбайном возможно в условиях спокойной гипсометрии. Прохождение участков интенсивной складчатости требует вмещательства машиниста комбайна.
Известен способ автоматического управления комбайном 2, заключающийся в измерении отклонения исполнительного органа комбайна от заданного положения в профиле пласта, сравнении отклонения с допуском на точность вождения комбайна и с предельно допустимым значением отклонения и выработке команд управления перемещением исполнительного органа.
Устройство, реализующее этот способ, позволяет осуществлять автоматическое вождение комбайна в профиле пласта в условиях спокойной гипсометрии при отсутствии резких перегибов маркирующего прослойка 2.
При сложной гипсометрии отрабатываемого пласта данные способ и устройство не обеспечивают достаточной точности вождения комбайна. Это связано с тем, что микроскладки с размерами, превышающими поле зрения фотоэлектрического датчика, приводят к подаче команд на перемещение исполнительного органа комбайна, т.е. устройство не предусматривает мер по фильтрации высокочастотной составляющей складчатос5 ти, поэтому профиль выработки не является оптимальным. Увеличение поля зрения датчика могло бы повысить представительность информации о положении комбайна в профиле пласта. Однако отсутствие признаков, по которым можно отличить контролируемый прослоек от таких же соседних, не позволяет значительно увеличить вертикальный размер поля зрения. А для обеспечения возможности автономного слежения за прослойком при наличии перегибов пласта, необхо5 димо ограничить горизонтальный размер поля зрения датчика.
Другим недостатком этого устройства является возможность потери информации о положении комбайна в профиле пласта при прохождении опрокинутых образных складок
0 или складок с амплитудами, превышающими диапазон допустимых перемещений сервомеханизма датчика. Потеря информации требует включения цепи технологической защиты и вмещательства машиниста комбайна для управления. Поэтому область применения данного устройства ограничена участками с отсутствием заметной микроскладчатости. Известны также устройства для контроля положения комбайна в профиле пласта, использующие различие в уровнях естественной радиоактивности сильвинитовых и галитовых слоев 2. Благодаря тому, что слои значительно меньше подвержены складчатости, чем отдельные пакеты и прослойки, а также из-за высокой проникающей способности гамма-излучения калия такой способ контроля обеспечивает больщую представительность информации по сравнению с фотоэлектрическим. Усреднение информации из объема полусферы с радиусом порядка толщины слоя полного поглощения гамма-излучения в руде (несколько десятков сантиметров) позволяет ослабить влияние микроскладок с теми же размерами на показания датчика. Второй вход элемента ИЛИ известного устройства соединен с выходом второго компаратора, а выход подключен к входу блока отключения подачи комбайна, соответствующие входы первого компаратора подключены к выходам блока определения угла проходимой складки и задатчика величины угла, соответствующие входы второго компаратора подключены к выходам датчика пути и задатчика длины пути, а выход первой схемы совпадения подключен к управляющему входу датчика пути. Однако при прохождении участков интенсивной складчатости слоев с характерными размерами складок и крутыми углами падения крыльев могут возникать отклонения, превышающие предельно допустимые значения. Так, например, если контролируемая граница раздела слоев находится в средней части сечения выработки, то допустимые относительные смещения датчика и контролируемого слоя не должны превыщать диапазона перемещения сервомеханизма устройства автономного слежвния и эти смещения должны быть меньше расстояния до кровли и почвы выработки. В реальных условиях контроль положения комбайна в профиле пласта часто требуется осуществлять относительно верхней границы отрабатываемого пласта, так как от этого зависит устойчивость кровли выработки. В таком случае допустимый диапазон смещений определяется мощностью слоя породы, присекаемой из кровли. Таким образом, при интенсивной складчатости будет происходить потеря информации о положении комбайна в профиле пласта и необходимо вмешательство машиниста комбайна для управления. Следовательно, область применения известных устройств ограничена в основном участками со спокойным залеганием пластов. Известно устройство для автоматическо го вождения горного комбайна по гипсометрии пласта 3 в профиле пласта, соединенное с входом блока сигнализации предельно допустимых отклонений и первым входом блока сравнения, второй вход которого соединен с выходом задатчика допустимой точности ведения комбайна, а выход подключен к входу блока упнавления исполнительным органом, датчиком пути и блоком отключения подачи комбайна. Оптимальной траекторией движения комбайна является та, которая обеспечивает минимальное среднеквадратичное отклонение профиля проходимой выработки от профиля пласта. В условиях сложной гипсометрии наблюдаются складки с большими амплитудами и крутыми углами падения крыльев. Технология комбайновой выемки ограничивает уклоны проходимых выработок, поэтому для обеспечения оптимальности траектории необходим прогноз о поведении пласта. Поскольку информация о положении комбайна поступает с боковой стенки выработки, то в канале получения информации существует транспортное запаздывание, величина которого определяется расстоянием вдоль от проходимой выработки между контролируемой точкой и той точкой исполнительного органа, в которой осуществляется окончательная отделка выработки. При наличии такого запаздывания экономически целесообразно повторять складки, длина которых по крайней мере в два раза превышает величину транспортного запаздывания. Складки с меньшей длиной не должны учитываться при регулировании. Способ фильтрации микроскладок, основанный на интегрировании выходного сигнала датчика по отрезку пути проходимой выработки, приводит к тому, что точка наблюдения фактически смещается назад йа половину длины отрезка интегрирования. Это увеличивает величину транспортного запаздывания, что в свою очередь требует фильтровать складки большой длины. Поэтому известный способ применим только для таких отрезков интегрирования, которые не слишком увеличивают величину транспортного запаздывания. Следовательно, оптимизация траектории движения комбайна касается только микроскладок и не затрагивает складок с размерами порядка метра. При прохождении участков сложноскладчатого строения могут возникать локальные отклонения исполнительного органа комбайна от заданного положения в профиле пласта, превышающие предельно допустимые значения, что будет приводить к отключению подачи комбайна. Поэтому устройство не обеспечивает требуемой точности вождения в сложных горногеологических условиях. Цель изобретения - повышение точности управления исполнительным органом комбайна в вертикальной плоскости при прохождении участков сложноскладчатого троения пластов. Поставленная цель достигается тем, что в способе, заключающемся в измерении отклонения исполнительного органа комбайна от заданного положения в профиле пласта, сравнении отклонения с допуском на точность вождения комбайна и с предельно до.пустимым значением отклонения и выработке команд управления перемепдением исполпительного органа, определяют угол падения крыла проходимой складки, сравнивают его с заданным, и при .возникновении отклонения, превышающего предельно допустимое значение, отключают подачу комнайна немедленно при условии, что угол прохоДИМОЙ складки меньще заданного, а в случае, если угол проходимой складки больше заданного, прекращают подачу команд управления перемещением исполнительного органа на отрезке пути, равном щирине сжатой складки, и если на этом отрезке отклонение не станет меньше предельно допустимого, отключают подачу комбайна. Поставленная цель достигается тем, что устройство, содержащее датчик положения комбайна в профиле пласта, соединенный с выходом блока сигнализации предельно допустимых отклонений и первым входом блока сравнения, второй вход которого соединен с выходом задатчика допустимой точности ведения комбайна, а выход подключен к входу блока управления исполнительным органом, датчиком пути и блоком отключения подачи комбайна, дополнительно снабжено блоком определения угла проходимой складки, задатчиком величины угла, задатчиком длины пути, ключевым элементом, первым и вторым компараторами, первой и второй схемами совпадений, схемой ИЛИ и инвертором, при этом управляемый вход ключевого элемента соединен с выходом блока управления исполнительным органом, а управляющий вход соединен с выходом первой схемы совпадений, первый вход которой подключен к выходу первого компаратора, а второй вход соединен с выходом блока сигнализации предельно допустимых отклонений и первым входом второй схемы совпадений, второй вход которой через инвертор соединен с выходом первого компаратора, а выход подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом второго компаратора, а выход подключен к входу блока отключения подачи комбайна, соответствующие входы первого компаратора подключены к выходам блока определения угла проходимой складки и задатчика величины угла, соответствующие входы второго компаратора подключены к выходам датчика пути и задатчика длины пути, а выход первой схемы совпадений подключен к управляющему входу датчика пути. Физически предлагаемый способ основан на различии средних углов падения крыльев складок разной щирины. Так, например, слоевые складки на Верхнекамском месторождении калийных солей имеют амплитуду 1 -1,5 м и щирину 0,6-0,8 м. По степени сжатия преобладают крутые и полукрутые складки. Широко развиты сжатые складки. Для пластовых складок характерны щирина и длина 15-20 м по амплитуде от 0,5 до 4 м. По степени сжатия преобладают пологие и плоские, сжатые составляют всего 0,5%. Для зональных и межзональных складок отнощение амплитуды к длине складки еще меньще, чем для слоевых. Поэтому, контролируя угол, можно предсказать, какой длины складку начинает проходить комбайн и в соответствии с этим выбрать алгоритм управления. Так, при прохождении участка сжатых складок с большой амплитудой и относительно незначительной длиной (единицы метров) оптимальной будет траектория, повторяющая средний угол падения пласта. Поэтому на таком участке могут вообще не потребоваться дополнительные управляющие воздействия для изменения положения исполнительного органа. С другой стороны, если отклонение превысило предельно допустимое значение при прохождении широкой складки, необходимо отключить подачу и произвести операции по отгону комбайна и зачистке почвы выработки. Такая ситуация возникает, если угол падения широкой складки превышает величину допустимого уклона выработки. Таким образом, предлагаемый способ позволяет обеспечить прохождение в режиме автоматического управления участков сложноскладчатого строения и уменьшить количество случаев, которые требуют вмешательства машиниста. Прекраш;ение подачи команд управления перемещением исполнительного органа на отрезке пути, равном ширине сжатой складки, позволяет увеличить точность управления и тем самым уменьшить разубоживание добываемой руды. На чертеже изображена блок схема предлагаемого устройства. Датчик 1 положения комбайна в профиле пласта механически связан с исполнительным органом 2 комбайна 3. Выход датчика 1 соединен с первым входом блока 4 сравнения, к второму входу которого подключен задатчик 5 допустимой точности ведения комбайна. Выход датчика 1 подключен также к входу сигнализатора 6 предельно допустимых отклонений. К входам перв;ого компаратора 7 подключены блок 8 определения угла проходимой складки и задатчик 9 величины угла. Выход первого компаратора подключен к первому входу пбрвой схемы 10 совпадений, а второй ее вход - к выходу сигнализатора 6 предельных отклонений. Выход первой
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ялышев А | |||
| У., Лазоренов О | |||
| И | |||
| Многофункциональные аналоговые регулирующие устройства автоматики | |||
| М., «Машиностроение, 1981, с | |||
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
