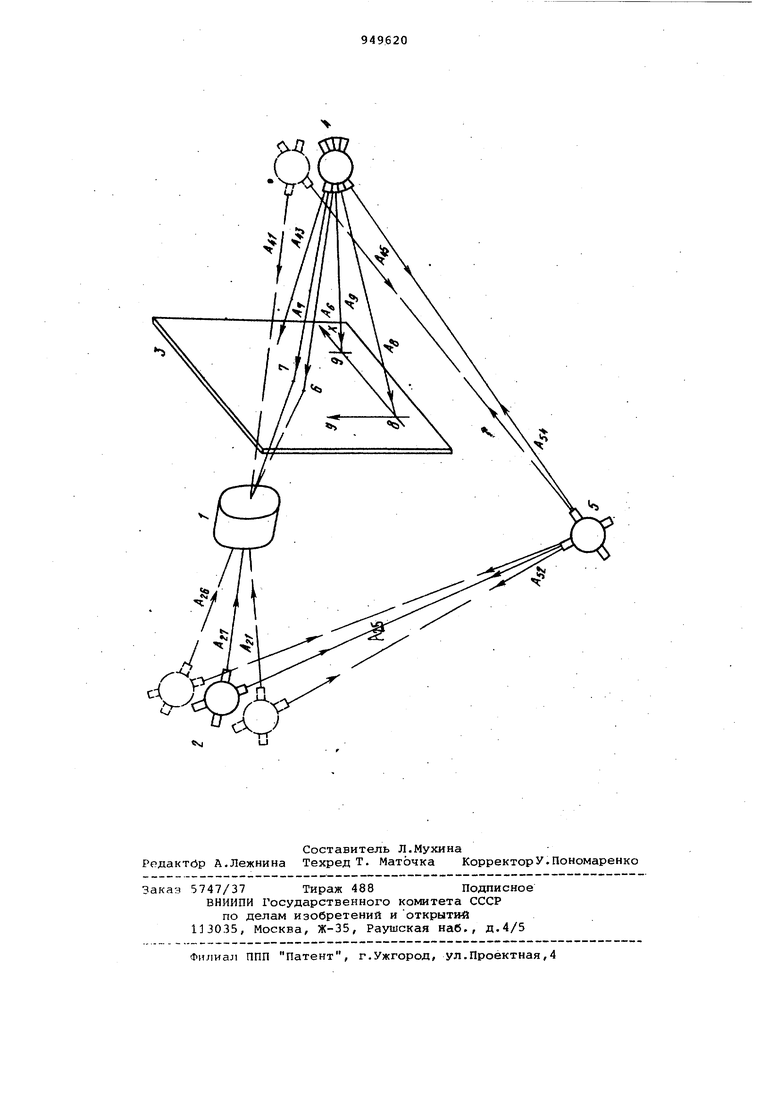
вого теодолита и координатные метки снимка.теодолитом за объективом и по результатам измерений рассчитывают координаты главной точки снимка. Базовые линии задают поочередным визированием дополнительного теодолита на два измерительных теодолита. При исследовании многолинзовых объективов циклы измерений повторяют для различных оптических осей, соответствующих различным поверхностям линз объектива, и рассчитывают дисторсиго для каждой такой оптической оси, На чертеже представлена схема осушествления предлагаемого способа. Перед объективом 1 поступательно перемещают автоколлимационный теодолит 2 в точку пространства, через которую.проходит оптическая ось объектива 1..При последовательной перефокусировке теодолита 2 в его поле зрения будут появляться автоколлимационные изображения точечной марки, два из которых совпадут с пространственным положением точечной марки теодолита 2. За прикладной рамкой 3 фотокамеры поступательно перемещают другой автоколлимационный теодолит 4 в точку пространства, через которую проходит оптическая ось объектива 1. Теодолитами 2 и 4 наносят в поле кадра прикладной рамки 3 автоколлимационные изображения точечных марок и ориентируют их отсчетные оси относительно отсчетных осей третьего теодолита 5, расположенного в зоне взаимной видимости теодолитов 2 и 4. Тремя теодолитами измеряют углы между направлениями соответственно А и 4 45 51- 54- ° Р® зультатам данньТх измерений рассчитываются дисторсию оптической оси 1. Затем теодолиты 2 и 4 перемещают в новые точки пространства, через ко торые проходит другая оптическая ось и производят контроль совмещения точечной марки теодолитов 2 и 4 с парой ее новых автоколлимационных изображений путем перефокусировки каждого инструпента. Процесс измерения углов тремя теодолитами и расчет зна чения дисторсии оптической оси повторяют . После того как по результатам измерений получено распределение дисторсии вблизи геометрической оси, .проходящей через центр объектива, те одолитом 4 измеряют угол между направлением А4Э перпендикулярным плос кости рамки 3, и направлением А. на точечную марку теодолита 5. По результатам измерения углов между направ лениями А.гИ A4I5-/ А, и R. рассчиты вают: значение угла между направления ,ми и AII;. Зрительную трубу теодо лита 2 наводят по направлению А26 г перпендикулярному плоскости рамки 3, в поле кадра которой наносят автоколлимационное изображение точечной марки б. Чтобы определить положение главной точки снимка, по данным распределения ДИСТ.ОРСИИ рассчитывают дисторсию направления А . С учетом полученной дисторсии визирный луч теодолита 2 ориентируют по направлению А27 и в поле кадра рамки 3 наносят автоколлимационное изображение точечной марки 7, совпадающее с главной точкой снимка фотокамеры. С помощью теодолита 4 производят измерение углов между направлениями на точечные марки 6 и 7 и координатные точечные метки 8 и 9, расположенные в плоскости рамки фотокамеры и задакядие систему координат X 8 Y. Расчет координат точечных марок 6 и 7 производят полярным способом, используя несколько твердых опорных точек снимка для получения избыточных данных, необходимых для оценки точности получаемых параметров. Направление А27 теодолита 2 на главную точку 7 снимка вычисляют из соотнсяиения l- ltNfV45 f4- 6/ i6 а на точку-6 снимка, когда входной луч теодолита 2 , перпендикулярен к плоскости прикладной рамки 3, по формуле . . д . 1б 15 5a 54 V5 N3Координаты точек 6 и 7 рассчитывают соответственно из уравнений : )( ( 89+Чбб) ( 89- f87 - S97COS (о(-98 ),О О - V I . , 7 ё ST-bin Cot89 4 g, )--Vg Si toC ), .gra-ctgr.ct g-cig tfeofg -arccos (beg -bee ). ,) yjg-arcco Cbje-fog)/ (b9e-fag7),V- 96-S96--Sb56, Sg, Sb87,S57-51 5--CW8-X9)(8-), Ag , « COSlAgAAfe) cosCVAfi) 87 Cos(Ae/vA,) 9T С05(А9лА7) . Ьв9-Чб 8бЧ7- 87 a дисторсию главной точки снимка определяют как разность координат точек 6 и7 фотокамеры 47-VS . где gjYg ДдД„- к OOP дин а-ы точечны меток 8 k 9, распо ложенные а плоскос ти рамки 3 фотокамеры;Х, Y - координаты главной точки снимка фотокамеры;DX ,DY - дисторсия главной точки снимка фоток меры. , Использование значения координат и дисторсии главной точки снимка фотокамеры при анализе фотограмметрического качества объективов позволяет реишть вопрос о целесообразностииспользования того или иного объектива на стадии сборки фотографической систе1 ы, а также контролировать качество сборки этой аппаратуры в целом. Кроме того/ появляется возможность математической обработки многозонального изображения с целью улучшения его дешифровочных признаков . . Формула изобретения 1, Способ юстировки фотокамер с помощью автоколлимационного тердолита, изображение точечной марки которого проектируют в плоскость прикладной рамки фотокамеры по направлению оптической оси объектива, от личающийся тем, что, с целью определения дисторсии объектива, размещают два автоколлимационных теодолита с противоположных сторон прикладной рамки и перемещают их до совмещения точечных марок каждого теодолита с их автоколлимационными изображениями, соответствующими отра жениям от внешних поверхностей объектива при различной фокусировке те одолитов, а затем изображение точечной марки каждого теодолита проектируют в- плоскость прикладной рамки и измеряют углы между оптическими осями каждого из теодолитов и базовыми линиями, по которым вычисляют дисторсию объектива. 2.Способ ПОП.1, отличающийся тем, что, с целью определения координат главной точки снимка, проектируют изображение точечной марки автоколлимационным теодолитом, установленным перед объективом, в плоскость прикладной рамки по направлению, составляющему угол с линией, перпендикулярной плоскости прикладной рамки, рав«ый полученному значению дисторсии оптической оси измеряют углы между направлениями визирования на изображения этих точечных марок первого теодолита и координатные метки снимка теодолитом за объективом и по результатам измерений рассчитывают координаты главной точки снимка. 3.Способ Попп.1и2, отли- , чающийся тем, что базовые линии задают поочередным визированием дополнительного теодолита на дв.а измерительных теодолита. 4.Способ по пп., отличающийся тем, что/ с целью исследования многолинзовых объективов/ циклы измерений повторяют для различных оптических осей, соответствующих различным поверхностям линз объектива/ и рассчитывают дисторсик) для каждой такой оптической оси. Источники информации/ принятые во внимание при экспертизе 1.Зимам Я.Л. и др. Фотограмметрическая калибровка фотографических систем с помощью поступательно перемещаемого теодолита. - Геодезия и картография,1973, № 5. 2.Авторское свидетельствоСССР 258633, кл. бОЗ В 43/00, 03.05.69 (прототип ) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для калибровки аэрофотоаппаратов | 1974 |
|
SU519678A1 |
| Способ определения элементов внутреннего ориентирования фотограмметрической камеры | 1978 |
|
SU731289A1 |
| СПОСОБ ЮСТИРОВКИ КОНТРОЛЬНОГО ЭЛЕМЕНТА ЛИНИИ ВИЗИРОВАНИЯ ОБЪЕКТИВА | 2014 |
|
RU2606795C2 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| Система для определения погрешности направления визирования телескопа | 1985 |
|
SU1335805A1 |
| Способ калибровки изображений стереофотограмметрической системы | 1988 |
|
SU1703972A1 |
| СПОСОБ ЮСТИРОВКИ АЭРОФОТОКАМЕРЫ | 1946 |
|
SU67865A1 |
| Способ разметки деталей приварного насыщения на поверхности в помещении судна | 1990 |
|
SU1795282A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ВЫВЕРКИ НУЛЕВЫХ ЛИНИЙ ПРИЦЕЛИВАНИЯ ОПТИКО-ЭЛЕКТРОННЫХ КАНАЛОВ ПРИЦЕЛОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2018 |
|
RU2695141C2 |
| СПОСОБ МАСШТАБИРОВАНИЯ СНИМКОВ ФОТОПЛАНИМЕТРИЧЕСКОЙ СЪЕМКИ ГОРИЗОНТАЛЬНЫХ ГОРНЫХ ВЫРАБОТОК | 2020 |
|
RU2791080C2 |