Изобретение относится к автоматическому управлению и может быть использовано для циклового управления робототехническими комплексами .
Известны программные управляющиеустройства, построенные по стандартной позиционной структуре и содержащие блок логических условий, соединенный через блок обегания с блоком выходов, который в свою очередь связан с объектом управления, а также датчики контроля состояния объекта управления, соединенные с блоком логических условий 1.
К недостаткам данных устройств относятся сложность конструкции и невозможность оперативного программирования работы.
.Наиболее близким к изобретению является программное управляющее устройство, содержащее блок обегания, выходы которого через блок набора программы соединены со входами блока формирования управляющих сигналов 2 .
Это устройство функционирует по временной программе и содержит требующий больших аппаратурных затрат блок обегания, так. как число его ячеек обусловлено продолжительностью
цикла работы, а не числом производимых устройством операций. Кроме того, из-за накопления временной ошибки это устройство обладает низкой надежностью.
Целью изобретения является упрощение и поВЕЛшение надежности устройства.
Указанная цель достигается Тем, что программное управляющее и контролирующее устройство, содержащее блок обегания, выходы которого Соединены, с первыми входами блока набора программы, и блок формирования управляющих сигналов, который содержит по числу управляемых объектов узлы формирования команд, каждый из которых состоит из двух первых элементов ИЛИ и триггера, выход которого соединен
20 со входом соответствующего управляемого объекта, а входы - с выходами первых элементов ИЛИ, входами подключенных к первым выходам блока набора программы, содержит первый элемент ИЛИ-НЕ, а блок формирования управляющих сигналов содержит по числу контролируемых объектов узлы подтверждения состояний контролируемых объектов, каждый из которых
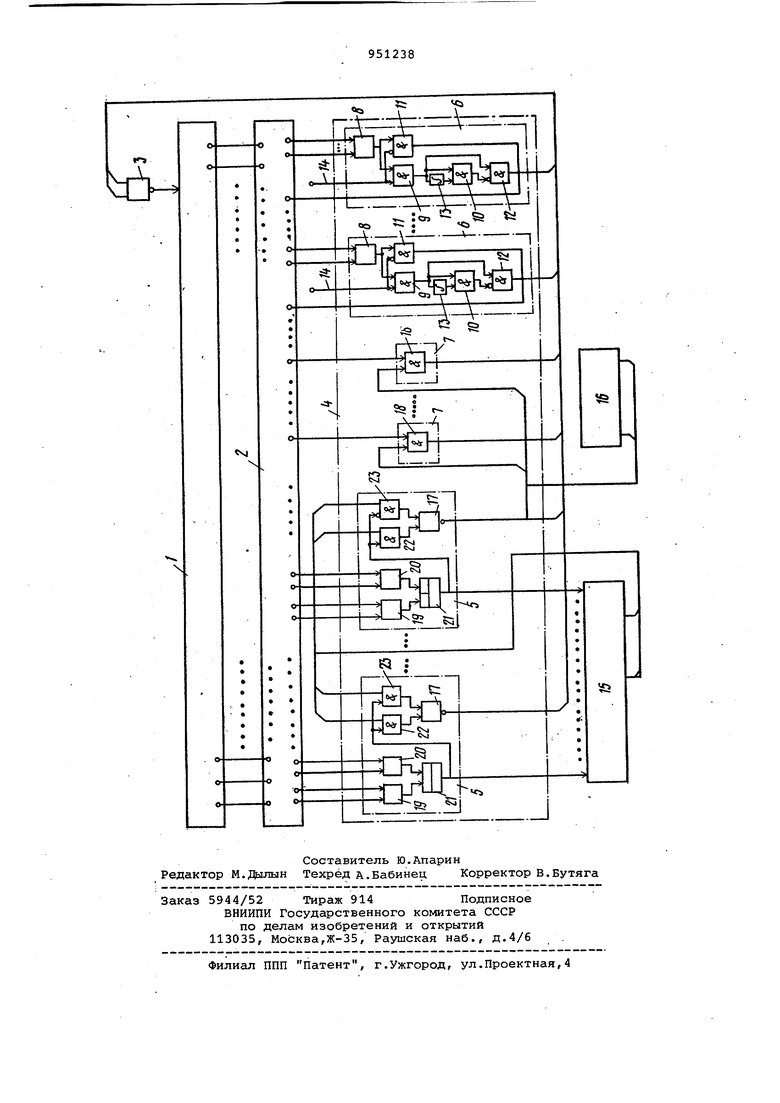
30 состоит из первого элемента И, и по числу условных переколов программы узлы условных переходов, каждый из которых состоит из второго элемента ИЛИ, первого и ВТОРОГО элементов ЗАПРЕТ, второго и третьего элементов И и интегратора, а в каждый узел фор мирования команд введены третий элемент ЗАПРЕТ, четвертый элемент И и второй элемент ИЛИ-НЕ, причем первый вход первого элемента И соединен с выходом соответствующего контролируе мого объекта, выход второго элемента ИЛИ соединен с первым входом второго элемента И и с прямым входом первого элемента ЗАПРЕТ, выход которого сое|Цинен со вторым входом блока набора программы, выход второго элемента И - с первым входом третьего элемента И и прямым входом второго элемента ЗАПРЕТ, а через интегратор - со вторым входом третьего элемента И,вы ход которого сЬединен с инверсным входом второго элемента ЗАПРЕТ, первый вход четвертого элемента И и инверсный вход третьего элемента ЗАПРЕ соединены с выходом триггера, второй и прямой входы - с выходами соответствующих управляемых объектов, а выходы - со входами второго элемента ИЛИ-НЕ, входы первого элемента И и второго элемента ИЛИ соединены со вторыми выходами блока набора програ мы, выходы первого элемента И,вторых элементов ИЛИ-НЕ и ЗАПРЕТ соединены со входами первого элемента ИЛИ-НЕ, а соединенные между собой инверсный вход первого элемента ЗАПРЕТ и второй вход второго элемента И подключены ко входу блока формирования управляющих сигналов. Включение узлов формирования команд в структуру блока формирования управляющих сигналов позволяет существенно уменьшить число ячеек в блоке обегания, а также перейти от задания временных интервалов между отдельными тактами к заданию перёхода.от одного такта к другому по отработке управляющих воздействий. При этом описание работы устройства может быть составлено на языке относительно крупных обобщенных технологических команд, расшифровка которых производится с помощью узлов формирования команд, каждый из которых управляет объектом управления и выдает сигнал квитирования об окончании выполнения команды управления объектом. Управляемыми объектами могут быть пневмо- или гидроцилиндры с распределителями и конечными выключателями , гидродвигатель, электродвигатель и т.д. Состояние такого управляемого объекта постоянно контролируется узлом формирования команд. Каждый узел формирования команд может быть многократно использован в течение цикла, что приводит к существенной экономии аппаратуры. Включение узлов условных переходов позволяет простыми средствами реализовать альтернативные продолжения в алгоритме управлений, а узлов подтверждения состояний контролируемых объектов - осуществлять информационную связь с контролируемыми объектами, состояние которых контролируется не постоянно, а только в некоторые, заранее заданные, моменты цикла. Введение узлов формирования команд позволяет упростить отладку и доводку устройства, поиск и устранение неисправностей. Кроме того, достаточно просто изменением числа узлов формирования команд расширить или сократить число управляемых объектов, что часто встречается в процессе автоматизации технологического оборудования. На чертеже показана .структурная схема программного управляющего и контролирующего устройства. Программное управляющее и контролирующее устройство содержит блок 1 обегания, блок 2 набора программы, первый элемент ИЛИ-НЕ 3 и блок 4 формирования управляющих сигналов, состоящий из узлов 5 формирования команд, узлов 6 условных переходов и узлов 7 подтверждения состояний контролируемых объектов. Каждый узел 6 содержит первый элемент ИЛИ 8, второй и третий элементы И 9 и 10-, первый и второй элементы ЗАПРЕТ 11 и 12, интегратор 13 и первые входы 14. Позицией 15 на чертеже обозначена совокупность управляемых объектов, которые управляются и контролируются в каждом такте алгоритма управления. Каждому объекту управления 15 поставлен в соответствие свой узел 5 формирования команд. Позицией 16 на чертеже обозначена совокупность контролируемых объектов, поведение которых контролируется изредка, по мере необходимости. Состояние контролируе1 Яз1х объектов контролируется с помощью узлов 7 подтверждения состояния контролируемых объектов. Узел 5 содержит второй элемент ИЛИ-НЕ 17. Каждый узел 7 подтверждения состояния контролируемого объекта содержит- первый элемент и 18. Каждый узел 5 формирования команд содерлсит первые, многовходовые элементы ИЛИ 19 и 20, триггер с раздельными входами 21 и четвертый элемент И 22, третий элемент . ЗАПРЕТ 23. Процесс настройки и программирования предложенного программного управляющего и контролирующего устройртва заключается в следующем: по числу управляемых объектов выбирается число узлов 5 формирования команд а по числу контролируемых объектов число узлов 7 подтверждения состояния контролируемых объектов. В зависимости от чиста тактов в алгоритме управления выбирается число точек обегания в блоке 1 обегания. В каждом такте в блоке 1 обегания возбуждается одна из его ячеек и на ее выходе появляется единичный сигнал, которыйпоступает на блок 2 набора программы. С помощью блока 2 набора программы выход ячейки блока 1 обегания соединяется со входами элементов ИЛИ 19 и 20 тех узлов 5 формирования команд, состояние которых необходимо изменить в этом такте, и со вторыми входами элементов И 18 тех узлов 7 подтверждения состояния контролируемых объектов, которые в данном такте должны проконтролировать свой контролируемый объект 16. Узлы 5 формирования команд, на которые поступают команды в рассматриваемом такте, изменяют свое состояние, которое запоминается триггером 21. Информация об измененном состоянии узла 5 формирования,,, команд поступает с выхода триггера 21 на управляемый объект 15. Так как
;объекту 15 потребуется некоторое время для отработки команды, то в течение всего этого времени состояние объекта 15 не соответствует состоянию им управляющего узла 5.Информация о состоянии, объекта 15 поступает на входы элементов И 22 и ЗАПРЕТ 23 узла 5.Если состояние объекта 15 не соответствует состоянию узла 5, то на выходе элемента ИЛИ-НЕ 17 имеет место сигнал рассогласования - логическая единица. Если состояние объекта 15 соответствует состоянию узла 5, тогда на выходе элемента ИЛИ-НЕ 17 имеет место нулевой сигнал. Таким образом, пока все управляемые объекты 15, на которые поступают в рассматриваемом такте команды управления, их не исполнят, на выходах элементов ИЛИ-НЕ 1 соответствующих им узлов 5 формирования команд имеют место единичные сигналы. Если блок 4 формирования управляющих сигналов содержит только узлы 5 формирования, команд (узлы б условных переходов и узлы 7 подтверждения состояния контролируемых объектов отсутствуют), тогда, как только все возбужденные в рассматриваемом такте узлы 5 отработали заданные в этом такте команды, на выходах элементов ИЛИ-НЕ 17 всех узлов 5 возникают нулевые команды, поступающие на входы многовходового элемента ИЛИ-НЕ 3. В результате на выходе этого элемента появляется единичныйсигнал, который, поступая на вход блока 1 обегания-, изменяет его состояние. Наступает следующий такт.
характеризующийся появлением единичного сигнала на другом выходе блока 1 обегания. На некоторые узлы 5 формирования команд поступают новые команды управления, наступает ситуация рассогласования между состояниями этих узлов 5 и состояниями управляемых ими объектов. На выходах элементов ИЛИ-НЕ 17 указанных узлов
5появляются единичные сигналы, а на выходе многовходового элемента ШШНЕ 3 соответственно - нулевой сигнал Начинается переходной процесс в объектах управления 15, который заканчивается появлением единичного сигнала на выходе многовходового элемента ИЛИ-НЕ 3, что является информацией о выполнении всех команд такта и командой для очередного переключения блока 1 обегания. Если блок 4, кроме узлов 5 формирования команд содержит также узлы б условных переходов и узлы 7 подтверждения состояния контролируемых объектов, то переключение блока 1 обегания происходит только тогда, когда на всех входах элемента ИЛИ-НЕ 3 появляются нулевые сигналы. Узлы б используются для того, чтобы по внешней команде условного перехода р , поступающей
на первый вход 14, исключить какуюлибо стадию технологического процесса. Это достигается тем, что выход EY блока обегания 1 соединяют через блок 2 набора программы с вхо,дом элемента ИЛИ 8 узла б условных переходов, на первый вход 14 которог подают команду р , а выход элемента
ЗАПРЕТ 11 этого узла соединяют со входом узла 5 формирования команд также через блок 2. Если f О, то единичный сигнал с выхода Через элементы 8 и 11 узла б и через блок 2 поступает на вход узла 5 формирования команд, что соответствует исполнению такта, если J 1, то указанная связь блокируется на лементе ЗАПРЕТ 11, а на выходе элемента ЗАПРЕТ 12 узла б появляется кратковременный единичный сигнал, имитирующий переходный процесс в объекте управления. Кратковременный единичный импульс поступает на-вход многовходового элемента ИЛИ-НЕ 3. После исчезновения единичного сигнала на выходе элемента ЗАПРЕТ 12 узла
6на вход блока 1 обегания поступает единичный сигнал, переключающий его в очередную тактовую позицию. С помощью узла 7 подтверждения состояния контролируемого объекта осуществляется запрос о состоянии какоголибо контролируемого объекта 16. Если состояние контролируемого объекта 16 удовлетворяет условию продолжения технологического процесса, то на выходе элемента И 18 узла 7 - нулевой сигнал, в противном случае - сигнал единичный, и технологический процесс приостанавливается до тех пор, пока состояние запрашиваемого контролируе мого объекта не удовлетворяет услови продолжения процесса. Использование данного Программног управляющего и контролирующего устройства позволяет осуществить управление ровототехническим комплексом простыми и надежными средствами, дает возможность существенно упростить наладку оборудования и предо- ставляет эффективные возможности для оперативного изменения алгоритма управления технологическим процессом. Формула изобретения Программное управляющее и контролирующее устройство, содержащее блок обегания, выходы которого соединены с первыми входами блока набора программы, и блок формирования управляющих сигналов, который содержит по числу, управляемых объектов узлы формирования команд, каждый из которых состоит из двух первых элементов ИЛИ и триггера, выход которого соединен со входом соответствующего управляемого объекта, а входы - с выходами первых элементов ИЛИ, входами подключенных к первым выходам, блока набора программы, отлича-ющее с я тем, что, с целью упрошения и повышения надежности устройства, оно .содержит первый элемент ИЛИ-НЕ, а блок формирования управляющих сигналов содержит по числу контролируемых объектов узлы подтверждения состояний контролируемых объектов, каждый из которых состоит из первого элемента И, и по числу условных переходов программы узлы условных переходов, каждый из которых состоит из второго элемента ИЛИ, первого и второго элементов ЗАПРЕТ, второго и третьего элементов И и интегратора, а в каждый узел формирования команд йведены третий элемент ЗАПРЕТ,четвертый элемент И и второй элемент ИЛИ-НЕ, причем первый вход первого элемента И соединен с выходом соответствующего контролируемого объекта, выход второго элемента ИЛИ соеди.нен с первым входом второго элемента И и с прякалм входом первого элемента ЗАПРЕТj выход которого соединен со вторым входом блока набора программы, выход второго элемента И с nepBtjM входом третьего элемента И и прямым входом второго элемента ЗАПРЕТ, а через интегратор со вторым входом третьего элемента И, выход которого соединен с инверсным входом второго элемента ЗАПРЕТ, первый вход четвертого элемента И и инверсный вход третьего элемента ЗАПРЕТ соединен с выходом триггера, второй и прямой входы - с выходами соответствующих .управляемых объектов, а выходы со йходами второго элемента ИЛИ-НЕ, входы первого элемента И и второго элемента ИЛИ соединены со вторыми выходами блока набора программы, выходы первого элемента И, вторых элементов ИЛИ-НЕ, и ЗАПРЕТ соединены со входами первого элемента ИЛИ-НЕ, а соединенные между собой инверсный вход первого элемента ЗАПРЕТ и второй вход второго элемента И подключены ко входу блока формирования управляющих сигналов. Источники информации, принятые во внимание при экспертизе 1.Построение пневматических дискретных управляющих устройств на базе аппаратуры системы ЦИКЛ. ИПУ. М., 1973, с.48-50. 2.Атлас П.М. и др. Опыт создания пневматического программного устройства управления промышленным роботом. Сб. Пневматика и гидравлика, вып.7. М., Машиностроение, 1979, с.156-163 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля блоков управления | 1986 |
|
SU1365086A1 |
| Многоканальная система для контроля и диагностики цифровых блоков | 1984 |
|
SU1269137A1 |
| Устройство для контроля микропроцессорной системы | 1990 |
|
SU1753474A1 |
| Устройство для программного управления | 1985 |
|
SU1273883A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство для управления и микродиагностики | 1981 |
|
SU968815A1 |
| Устройство для контроля функционирования логических блоков | 1986 |
|
SU1327107A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ ПАКЕТОВ ДАННЫХ В КАНАЛЕ СВЯЗИ ОБЩЕГО ПОЛЬЗОВАНИЯ | 1998 |
|
RU2137312C1 |
| Устройство для контроля цифровых объектов | 1974 |
|
SU546888A1 |
| Устройство для тестового контроля цифровых блоков | 1983 |
|
SU1136169A1 |