1
Изобретение относится к технике связи и может использоваться для коррекции межсимвольной интерференции в модулированных сигналах, передаваемых методами многофазной модуляции.
Известно устройство для адаптивной коррекции межсимвольной интерференции, содержащее первый и второй сумматоры по модулю два, входы которых являются входами знакрв отклонения амплитуды модулированных сигналов от номинала устройства, а выход каждого из которых подключен через соответствующий блок памяти знака отклонения амплитуды модулированного сигнала от номинала к входу блока сумматоров по модулю два, выход которого подключен к входу блока коммутаторов, первый управляющий вход которого является входом амплитуды устройства, второй вход соединен с тактовым выходом програм много блока, вход которого является
тактовым входом устройства, второй вход каждого сумматора по модулю два, чявляющийся входом полярностей откорректированного сигнала устройства, соединен через соответствующие блоки памяти полярностей модулированного сигнала с другим входом блока сумматоров по модулю два, выход синхронизации программного блока подключен к входам синхронизации блоков памяти
to знака отклонения амплитуды модулированного сигнала от номинала и блоков памяти полярностей модулированного сигнала, другой выход синхронизации программного блока подключен к
15 входу синхронизации цифрового гармонического корректора, другой вход которого является аналоговым входом устройства, а выход блока коммутаторов через цифровой гармонический кор20ректор подключен к выходу устройства ГО.
Однако известное устройство имеет низкую точность адаптивной коррекции.
Цель изобретения - повышение точности адаптивной коррекции путем компенсации искажений, возникающих из-за интегральных сдвигов когерентных колебаний
Поставленная цель достигается тем что в устройство для адаптивной кор:рекции межсимвольной интерференции, содержащее первый и второй сумматоры по модулю два, входы которых являются входами знаков отклонения амплитуды модулированных сигналов от номинала устройства, а выход каждого из которых подключен через соответствующий блок памяти знака от1 онёния амплитуды модулированного сигнала от номинала к входу блока сумматоров по модулю два, выход которого подключен к входу блока коммутаторов, первый управляющий вход которого является входом амплитуды устройства, второй вход соединен с тактовым выходом программного блока, вход которого является тактовым входом устройства, второй вход каждого сумматора по модулю два, являющийся входом полярностей откорректированного сигнала устройства, соединен через соответствующие блоки памяти полярностей модулированного сигнала с другим входом, блока сумматоров по модулю два, выход синхронизации программного блока подключен к входам синхронизации блоков памяти знака отклонения амплитуды модулированного сигнала .от номинала и блоков памяти полярностей модулированного сигнала, другой выход синхронизации программного блока подключен к входу синхронизации цифрового гармонического корректора, другой вход которого является аналоговым входом устройства, а выход - выходом устройства, введены блок памяти сигналов управления, дополнительный сумматор по модулю два и дополнительный коммутатор, управляющей вход устройства соединен с управляющим входом блока памяти сигналов управления, выход которого подключен к входу дополнительного коммутатора, второй вход которого через дополнительный сумматор по модулю два соединен с выходами блоков памяти : полярностей модулированного сигнала, выход блока коммутаторов через дополнительный Коммутатор подключен к другому входу цифрового гармонического корректора, а выход синхронизации программного блока подключен к входу
синхронизации блока памяти сигналов управления.
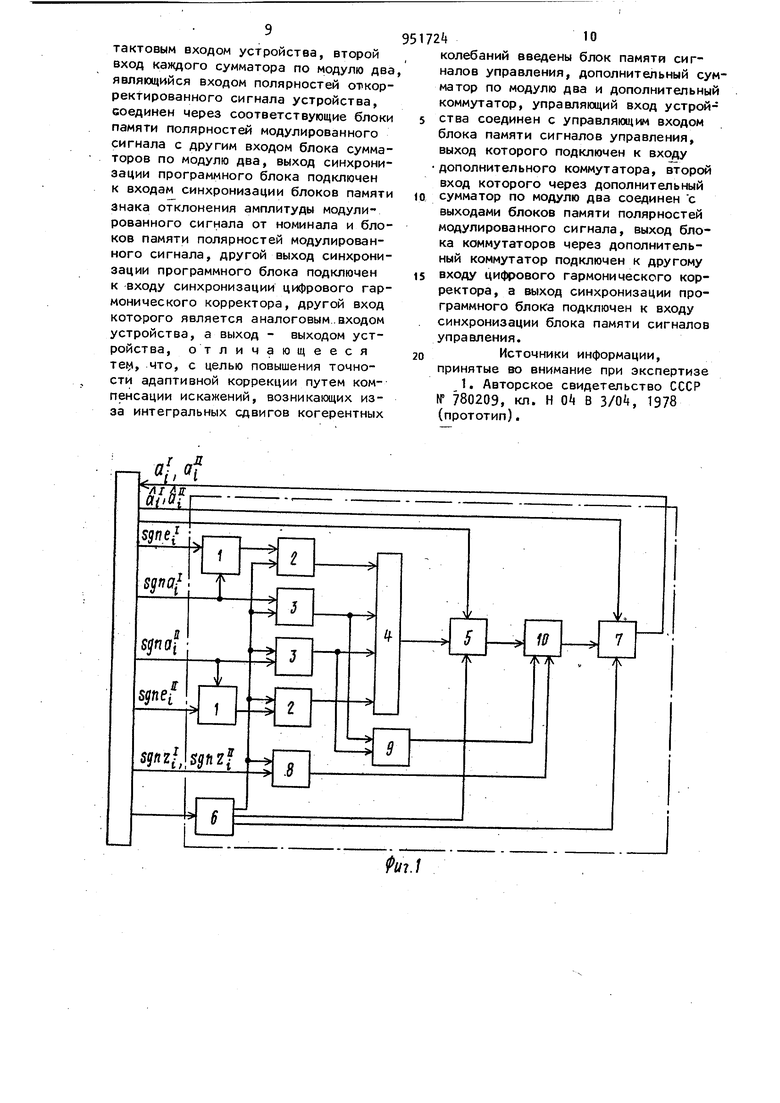
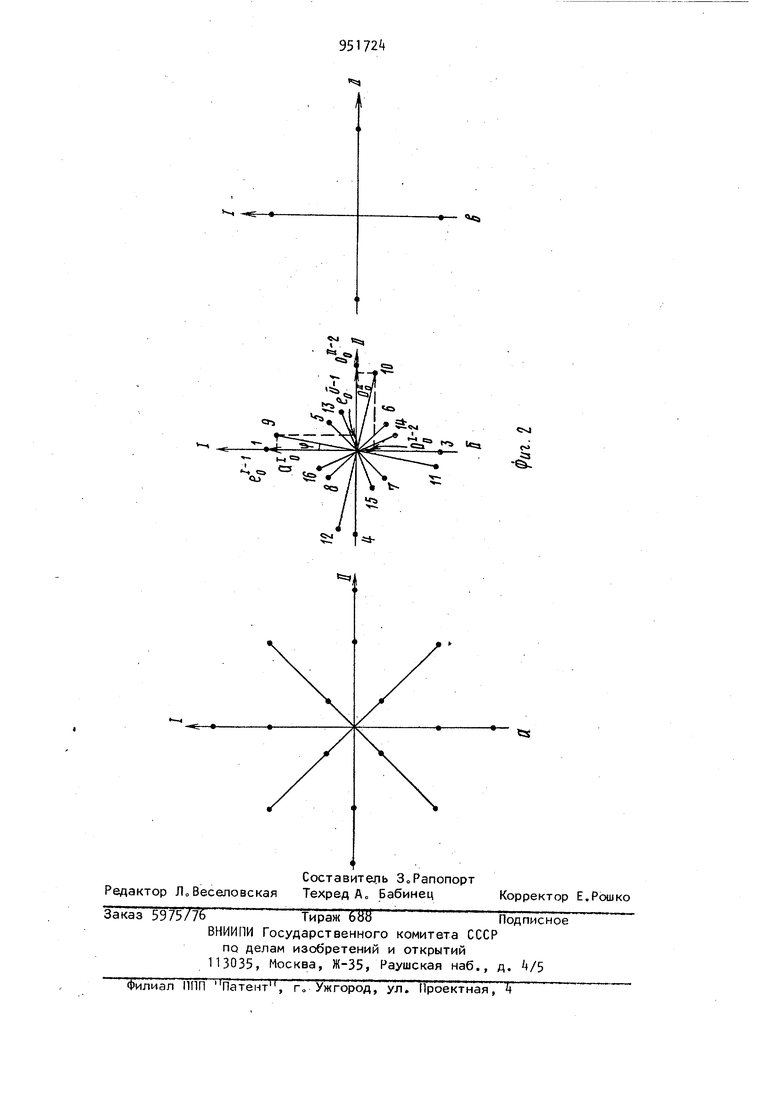
На фиг. 1 представлена структурная схема предлагаемого устройства, на 5 фиг. 2 - векторная диаграмма.
Устройство для адаптивной коррекции межсимвольной интерференции содержит сумматор 1 по модулю два, блок 2 памяти знака отклонения амплитуды модулированного сигнала от номинала, блок 3 памяти полярностей модулированного сигнала, блок Ч сумматоров по модулю два, блок 5 коммутаторов , программный блок 6, цифровой 15 гармонический корректор 7, блок 8 памяти сигналов управления, дополнительный сумматор 9 по модулю два, дополнительный коммутатор 10.
Устройство работает следующим образом.
Устройство осуществляет компенсацию межсимвольной интерференции в соответствии со следующими выражениями: - при компенсации синфазного ме- , 25 -шающего влияния
5 и 5 пао©5д а|©«Sfne U)
SQ H -5gvia ®s ha|-®sgneJ
i f гм- |г:ч .
- при компенсации квадратурного мешающего влияния
c,grM-br sgVia ® 5дгиа7®5д ие5 (з)
L4ntjl
sgyiii rsQrMaf©s§Haf®s he5c4)
Г
гдеб -иОибд-ую - знак проекции сигналов, подверженных мешающему влиянию, на когерентные колебания I и Д соответ1jf ственно;
5 иа;;-и egncl -- знак проекции сигналов, создающих мешающее влияние, на когерентные колебания J и ТТ COOT jj ветственно
591 С-и9д Иб,- знак проекции отклонения амплитуд модулированных сигналов ар и ао от номинала относительно коге рентных колебаний и Т соответственно. На входы первого сумматора 1 по модулю два с соответствующих выходов приемника .(не покадан) поступают сигналы SgfMef, а на входы второго сумматора 1 QO модулю два по ступают сигналы Sg-HOil и . Сигналы с выходов первого и второго сум маторов 1 по модулю два записываются, соответственно, в первый и второй блоки 2 памяти знака .отклонения амплитуды модулированного сигнала от номинала„ Кроме того, Сигналы Sgvia и egMC записываются в первый и второй блоки 3памяти полярностей модулированного сигнала соответственно С выходо блоков 2 и 3 сигналы поступают в бло 4сумматоров по модулю два, где осуществляется формирование сигналов . , f и в соответствии с выражениями (1) - (Ц) Сигналы с выхода блока k сумматоров по модулю два поступают на блок 5коммутаторов, в котором определяется выбор соответствующего направления регулировки коэффициентов пере дачи отводов устройства в зависимости от того, какое мешающее влияние компенсируется - синфазное. иЛи квадратурное. После интегрирования сигналов о знаке изменения коэффициента передачи анализируемого отвода в,цифровом гармоническом корректоре кодовое число, соответствующее коэффициенту передачи регулятора отвода, записывается в блок памяти коэффициентов передачи, входящий в состав корректо ра 7 (не показан). На второй входцифрового гармонического корректора 7 с выхода приемника поступают аналоговые сигналы а и аД, преобразуемые в нем в цифровые выборки посредством аналого-цифрового преобразователя. В соответствии с алгоритмом работ программного блока 6 в цифровом гармоническом корректоре 7 осуществляется последовательное (для каждого из отводов) перемножение цифровых слов кода выборки и коэффициента передачи регулятора, выводимых из соот ветствующих блоков памяти (не показа ны) корректора 7. Полученные произведения, Тс,е. цифровые сигналы на вы i ходах регуляторов отводов, последовательно суммируются, в результате чего на выходе корректора 7 формируются два откороектированных цифровых сигнала а и Эо, которые поступают в решающее устройство приемника (не показано) для декодирования и формирования сигналов управления устройством. Этот процесс продолжается до тех пор, пока не будут записаны такие коэффициенты передачи регуляторов отводов, при которых величина межсимвольной интерференции минимальна. Возможность изменения коэффициентов передачи регуляторов отводов устройства как по прямым, так и по перекрестным связям позволяет осуществлять компенсацию искажений в сигналах а:р и а из-за интегральных сдвигов когерентного колебания. Предположим, что положения векторов принимаемых сигналов в пространстве имеют вид, изображенный на фиг, 2 (точками на фиг. 2 обозначены возможные положения конца вектора принимаемого сигнала). Из фиг. 2 следует, что во всех представленных вариантах возможны случаи совпадения векторов принимаемого сигнала с одним из когерентных колебаний (I или Л). Допустим, что сигналы передаются методом восьмифазной модуляции,, как это представлено на фиг. 26 (аналогичное рассмотрение можно провести для пространства сигналов, приведенных на фиг. 2а и в). В этом случае вектор сигнала а может принимать восемь положений, пронумерованных на фиГо 26 цифрами 1-8„ Предположим, что когерентные колебания JL и ГТ сдвинулись по фазе на угол f. Новые положения векторов сигнала на фиг. 26 обозначены цифра ми 9-16. Возникшее при этом искажение сигнала не является следствием межсимвольной интерференции, поэтому коэффициенты передачи регуляторов всех отводов, кроме центральных, останутся неизменными Допустим, что вектор сигнала заниает положение, обозначенное на фиг.2б цифрой 1 При смещении когерентных колебаний на угол Ц вектор сигнала займет положение, обозначенное на иг. б цифрой 9. В этом случае сигнал выходе устройства уменьится на величину Сд, кроме того.
на его выходе появится сигнал а, равный по величине 1 Таким образом, для компенсаций искажений, возника1С1Щих из-за сдвига когерентного колебания (в рассматриваемом приме.ре) сигнал а должен быть увеличен за счет добавления сигнала а5 по перекрестной связио При этом си|- нал а 6- должен быть уменьшен за счет добавления по перекрестной связи. с нужным знаком сигнала а.
. Допустим, что вектор сигнала занимает положение, обозначенное на фиг. 26 цифрой 2. При смещении на угол Ч вектор сигнала займет положение, обозначенное на фиго 26 цифрой 10. В этом случае сигнал а уменьши ся на величину , а на выходе ус Р9йства будет зарегистрирован сигна
Л-4 -,
. Таким образом, с целью компенсации искажения, возникающего из-за когерентного колебания сигнал а о должен бытьуу -.еличен добавлением сигнала а Q. Аналогично сигнал а5 К должен быть уменьше за счет добавления по перекрестной связи с нужным знаком сигнала а- . - Кроме того, увеличение сигналов aQ в первом примере и аQ во втором примере осуществляется также за сче увеличения коэффициентов передачи регуляторов центральных отводов по прямым связям устройства.
Из рассмотренных примеров следует, что выражения (3 и() при использовать нельзя, поскольку они дают ложное решение. .
Необходимо их преобразовать в
)in | SQ HaJesg a (5)
Учитывая, что когерентные колебания I и П должны быть ортогональны, можно осуществить компенсацию искажений, обусловленных их интегральным сдвигом, путем однорременной нормализации амплитуд сигналов аГ и
11
а. Для осуществления этого процесса необходимо выявить те ситуации, когда принимаемые сигнгшы совпадают в пространстве с когерентным колебанием Для этого приемник (не показан) вырабатывает управляющие сигналы .gfHZ и Zr- о совпадении принимаемого сигнала а,; с когерентным колебанием I или Ц„
С целью необходимого совме111ения во времени сигналы SQn /.- и Sgvi 7. поступают на блок 8 памяти сигналов
5172t8
управления. Сигнал управления с выхода блока 8 памяти поступает на дополнительный коммутатор 10 только во время, соответствующее операциям в
5 центральном отводе по перекрестным связям и определяемое программным блоком 6.
В дополнительном сумматоре 8 по модулю два реализуются операции в
10 соответствии с выражением С5Л В дополнительном коммутаторе 10 по сигналам управления, поступающим от блока 8, осуществляется выбор сигнала о знаке изменения коэффициента
15 передачи регуляторов центральных отводов по перекрестным связям устройства. Если осуществляется компенсация Межаимвольной интерференции (алгоритм работы устройства описывается
20 при выражениями (1) - {), то . на вход цифрового гармонического корректора 7 поступает сигнал с выхода блока 5 коммутаторово Если осуществляется компенсация искажений из25 за интегральных сдвигов когерентного колебания (алгоритм работы устройства описывается выражением (5) то на вход корректора 7 поступает сигнал с выхода дополнительного сумматора
3(j 9 по м одулю два.
В .результате такой регулировки амплитуды сигналов а и ag примут не- минальные положения.
Таким образом, предложенное уст35 ройство повышает точность адаптивной . коррекции путем компенсации искажений, возникающих из-за интегральных, сдвигов когерентных Колебаний.
Формула изобретения
Устройство для адаптивной коррекции межсимвольной интерференции, содержащее первый и второй сумматоры по модулю два, входы которых являются входами знаков отклонения амплитуды модулированных сигналов от номинала устройства, а выход каждого из которых подключен через соответствующий блок памяти знака отклонения амплитуды модулированного сигнала от номинала к входу блока сумматоров по модулю два, выход которого подключен к
входу блока коммутаторов, первый управляющий вход которого является входом амплитуды устройства, второй вход соединен с тактовым выходом программного блока, вход которого является тактовым входом устройства, второй вход каждого сумматора по модулю два являющийся входом полярностей о-ркорpeKtMposaHHoro сигнала устройства, соединен через соответствующие блоки памяти полярностей модулированного сигнала с другим входом блока сумматоров по модулю два, выход синхронизации программного блока подключен к входам синхронизации блоков памяти знака отклонения амплитуды модулированного сигнала от номинала и блоков памяти полярностей модулированного сигнала, другой выход синхронизации программного блока подключен к входу синхронизации цифрового гармонического корректора, другой вход которого является аналоговым..входом устройства, а выход - выходом устройства, отличающееся Tetj, что, с целью повышения точности адаптивной коррекции путем компенсации искажений, возникающих изза интегральных сдвигов когерентных 4 колебаний введены блок памяти сигналов управления, дополнительный сумматор по модулю два и дополнительный коммутатор, управляющий вход устройства соединен с управляющим входом блока памяти сигналов управления, выход которого подключен к входу дополнительного коммутатора, второй вход которого через дополнительный сумматор по модулю два соединен с выходами блоков памяти полярностей модулированного сигнала, выход блока коммутаторов через дополнительный коммутатор подключен к другому входу цифрового гармонического корректора, а №1ход синхронизации программного блока подключен к входу синхронизации блока памяти сигналов управления. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 780209, кл. Н Oil В ЗМ, 1978 (прототип).
95172t
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой адаптивный корректор межсимвольных искажений в сигналах передачи данных | 1978 |
|
SU780209A1 |
| Устройство для адаптивной коррекции межсимвольных искажений | 1981 |
|
SU951725A1 |
| Адаптивный корректор сигнала | 1978 |
|
SU794735A1 |
| Цифровой адаптивный корректор межсимвольной интерференции | 1982 |
|
SU1083374A1 |
| Цифровой адаптивный корректорСигНАлА | 1978 |
|
SU832733A1 |
| Цифровой корректор сигналов | 1979 |
|
SU862366A1 |
| Цифровой адаптивный корректор меж-СиМВОльНыХ иСКАжЕНий B СигНАлАХ дАН-НыХ | 1978 |
|
SU801269A1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ КОРРЕКТОРА МЕЖСИМВОЛЬНОЙ ИНТЕРФЕРЕНЦИИ | 1991 |
|
RU2034404C1 |
| Перекрестный корректор межсимволь-НыХ иСКАжЕНий B СигНАлАХ дАННыХ,пЕРЕдАВАЕМыХ дВуХпОлОСНыМи МЕТОдАМи МОдуляции | 1978 |
|
SU849503A1 |
| Адаптивный корректор | 1989 |
|
SU1688418A1 |
-.
