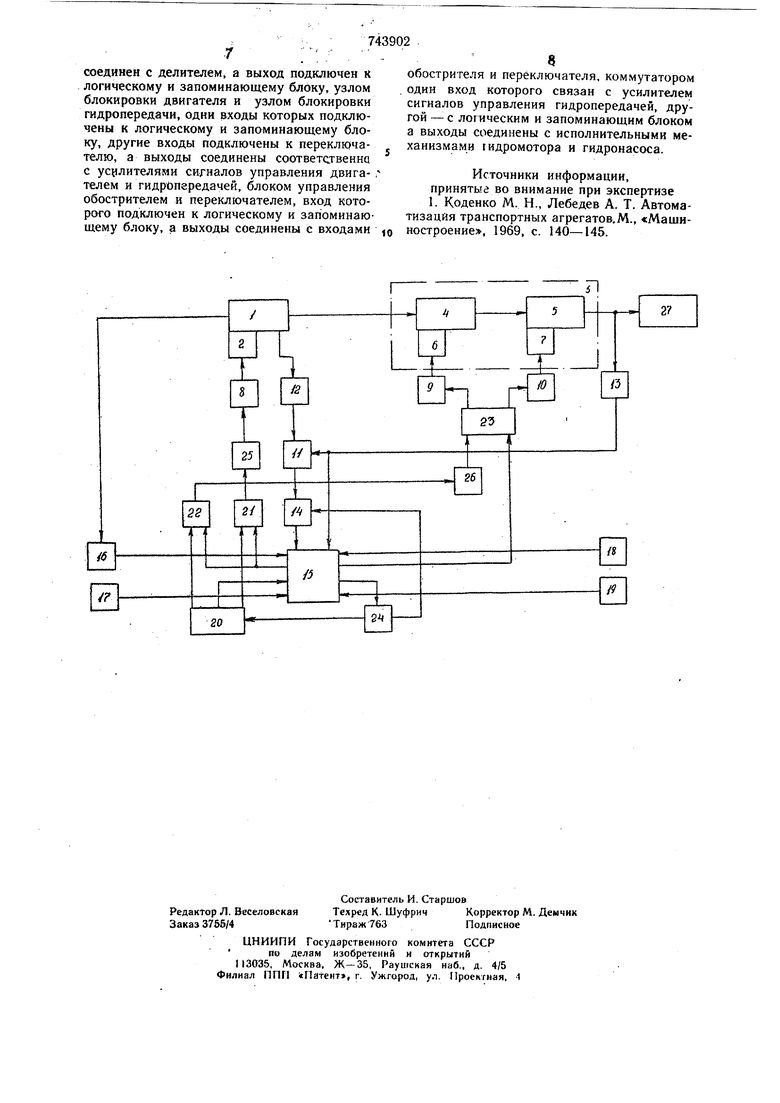
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА Изобретение относится к устройствам для автоматического регулирования, а именно к устройствам, поддерживающим значения регулируемых параметров в пределах необходимых значений, и может быть использовано дл:я регулирования параметров самоходных транспортных средств с бесступенчатой трансмиссией, а также в других областях народного хозяйства. Известно устройство для автоматического регулирования режима работы транспортного средства, содержащее переключатель режимов работы, двигатель с рейкой топливного насоса, связанной с исполнительным механизмом, соединенным с усилителем сигналов управления двигателем, связанным через расходомер с делителем напряжения, бесступенчатую передачу, включающую соединенный с двигателем гидронасос с регулирующим органом, соединенным с исполнительным механизмом, и гидромотор с регулирующий органом и исполнительным механизмом, включенный между, гидронасосом и нагрузкой, логический и запоминающий блок, ко входам которого подключены пере- f ключатель режимов работы и тахогенератор, соединенный с нагрузкой и Делителем {1J. Недостатком этого устройства является низкая точность поиска экстремальной точки регулирования и способность реализовать только один режим, например режим оптимизации работы транспортного средства Цель изобретения -- расширение функ циональных возможностей устройства авто матического регулирования. Указанная цель достигается тем, что устройство снабжено задатчиками угловой скорости гидромотора и скорости движения транспортного средства измерителем и задатчико-м угловой скорости двигателя, выходы которых соединены с входами логического и запоминающего блока, обострителем, один из входов которого соединен с делителем, а выход подключен к логическому и запоминающему блоку, узлом-блокировки двигателя и уолом блокировки гидропередачи, одни входы которых подключены к логическому и запоминающему блоку, другие входы подключены к переключателю, а выходы соединены соответственно с усилителями сигналов управления двигателем и гидропередачей, блоком управления обострителем и переключателем, вход которого подключен к логическому и запоминающему блоку, а выходы соединены с входами обострителя и переключателя, коммутатором,один вход которого связан с усилителем сигналов управления гидропередачей, другой - с логическим и запоминающим блоком, а выходы соединены с исполнительными механизмами гидромотора и гидронасоса. На чертеже представлена блок-схема устройства для автоматического регулирования режима работы транспортного средства. Устройство содержит двигатель 1 с рейкой 2 топливного насоса, соединенный с бесступенчатой передачей 3, включающей гидронасос 4 и гидромотор 5 с регулирующими органами 6 и 7, соответственно, гидронасоса 4 и гидромотора 5; исполнительные механизмы 8, 9 и 10, соответственно, рейки 2 топливного насоса, гидронасоса 4 и гидромотора 5. Делитель 11 соединен с расходомером 12, тахогенератором 13 и через обостритель 14 е логическим и запоминающим блоком 15, ко входам которого подключены измеритель 16 и задатчик 17 угловой скорости двигателя 1, задатчики 18 и 19, соответственно, угловой скорости гидромотора 5 и скорости движения транспортного средства, переключатель 20 режимов работы. К выходам блока 15 подключены узел 21 блокировки двигателя, узел 22 блокировки бесступенчатой передачи 3, коммутатор 23 и блок 24 управления обострителем и переключателем. Усилители 25 и 26 сигналов управления, соответственно, двигателем 1 и гидропередачей 3 соединены с выходами узлов 22 и 21. Нагрузка 27 соединена с гидромотором 5. Устройство работает в трех режимах, установка которых осуществляется с помощью переключателя 20, в режиме оптимизации параметров транспортного средства; в режиме поддержания постоянной скорости движения транспортного средства v const при минимальном -удельном расходе топлива; в режиме максимальной мощности N шах, характеризующейся максимальной нагрузкой двигателя, и воздействует на узлы блокировки 21, 22 исполнительных механизмов 8, 9 и 10 по сигналу с блока 24. Транспортное средство, состоящее из двигателя 1 и бесступенчатой передачи 3 имеет нагрузку 27. Режим работы двигателя 1 устанавливается с помощью рейки 2 топливного насоса, а режим работы бесступенчатой передачи - с помощью регулирующих органов гидронасоса 4 и гидромотора 5. Передаточное отнощение бесступенчатой передачи 3 выбирается по сигналу, поступающему на коммутатор 23 с усилителя 26 и в зависимости от положения коммутатора передается или на регулирующий орган гидронасоса 4, или на регулирующий орган гидромотора 5. Коммутатор 23 устанавливается в нужное положение по сигналу с логического и запоминающего блока 15. На блок 15 поступают два сигнала: один - с задатчика 18 угловой скорости гидромотора, а другой с тахогенератора 13, измеряющего скорость транспортного средства. На задатчике 18 устанавливается значение скорости, которое можно получить регулированием только гидронасоса. Это значение скорости выбирается возможно больщим и ограничивается допустимым минимальным значением КПД гидропередачи. Как только будет получена такая скорость, что будет свидетельствовать о пределе регулирования передаточного отнощения гидропередачи с помощью гидронасоса, появляется сигнал с блока 15, который устанавливает коммутатор 23 в такое положение, при котором сигнал управления с усилителя 26 сигналов управления гидропередачей поступает на регулирующий орган гидромотора 5. Таким образом, сигналы с усилителя 26 воздействуют на исполнительные механизмы 9 или 10, регулирующие бесступенчатую гидропередачу в зависимости от скорости движения транспортного средства. Расход топлива двигателем 1 измеряется с помощью расходомера 12. Сигналы, пропорциональны мгновенному значению хода топлива G и скорости движения v транспортного средства поступают на делитель 11, с вы.хода которого сигнал, пропорциональный критерию оптимизации --Q, поступает на обостритель 14. Если обостритель 14 не включен, то сигнал с делителя 11 поступает сразу на блок 15, минуя обостритель 14, который включается в работу по сигналу с блока 24 управления обострителем и переключателем. В процессе работы осуществляет поиск экстремума отнощения --Y-. После того, как система регулирования локализовала точку экстремума, она совершает колебания около этой точки. Признаком точки экстремума можно считать три последовательных колебания (без ухода в сторону) около точки экстремума. При этом блок 15 выдает сигнал блоку 24 управления обострителем и переключателем, которое включает обостритель 14 и уменьщает длительность шага поиска ДО минимума. Сигнал с обострителя 14поступает на блок 15, который реализует алгоритм поиска экстремума. Сигнал с блока 15поступает или на регулирующие органы 6,7 бесступенчатой гидропередачи или на рейку топливного насоса 2 двигателя 1. Переключение управляющего сигнала, поступающего с блока 15 на рейку топливного насоса и регулирующие органы 6 или 7,осуществляется по команде с блока 24, изменяющего положение переключателя 20. Переключатель 20 управляет узлом 21 блокировки двигателя и узлом 22 бесступенчатой передачи таким образом, что с блока 15 поступают три последовательных сигнала управления на один из регулирующих органов 6 или 7 или на рейку 2 топливного насоса в зависимости от состояния, в котором находится переключатель 20. После этого переключатель 20 меняет свое положение и три последовательных сигнала управления с блока 15 поступают на другой регулирующий орган. Так повторяется все время. Устройство управления переключателем 24 выполнено таким образом, что, по желанию оператора, можно изменять количество последовательных импульсов, поступающих на управление за время одного переключения. Таким образом, устройство, периодически воздействуя то на двига/елъ 1, то на бесступенчатую гидропередачу 3, изменяет параметры V и G так, что они приближаются к своему оптимальному значению. Во втором режиме работы (режим постоянной скорости движения транспортного средства V const) устройство работает как самонастраивающаяся система, у которой критерий оптимизации имеет в числителе постоянную величину V . Постоянная скорость движения тр: нспортного средств;ч X поддерживается с помощью следя ней системы, состоящей из задатчика 10 скорости транспортного средства, тахогенератора 13 и логических элементов, входящих Е блок 15. Переключатель 20 устанавливается в положение V const. При этом сигналы с логического и запоминающего блока 15 проходят через узлы блокировки 21 и 22 беспрепятственно,- а сигналы с блока 24 управления обострителем и переключателем не изменяют положение переключателя 20. Кроме того, сигналы с измерителя 16 и задатчика 17 блокируются переключателем 26 и не поступают в блок 15. В этом режиме самонастраивающаяся система и следящая система работают параллельно. Сигнал о действительной скорости транс портного средства поступает с тахогенератора 13 на блок 15, где сравнивается с сигналом с задатчика 19. Сигнал рассогласования через узел 22 поступает на регулирование бесступенчатой гидропередачи 3. Причем, сигнал воздействует на регулирующий орган 6 или 7 таким образом, чтобы скомпенсировать сигнал рассогласования, поступающий с тахогенератора 13 и задатчика 19. Этот сигнал управления воздействует на соответствующий регулирующий орган 6 или 7 бесступенчатой гидропередачи в соответствии с ранее описанным принципом работы. В это же время сигналы с тахогенератора 13 и расходомера 12 поступают на делитель 11. Через обостритель 14 и блок 15 в соответствии с алгоритмом управления сигнал поступает на узел 21 блокировки двигателя. Этот сигнал через усилитель 25 с помощью исполнительного механизма 8 воздействует на рейку 2 топливного насоса двигателя 1 так, чтобы критерий регулирования стремился к максимуму. В этом режиме работа самонастраивающейся системы аналогична ее работе в режиме оптимизации, изложенной выще, за исключением того, что настройка на оптимум осуществляется только по одному параметру G, в то время как регулирование второго параметра const путем воздействия на бесступенчатую передачу осуществляется с помощью следящей системы, выравнивающей сигналы с тахогенератора 13 и задатчика 19. Третий режим работы устройства - режим максиамльной мощности N max. В этом режиме устройство работает как следящая система. Рейка 2 топливного насоса ставится в положение предельной подачи топлива. Перюключатель 20 устанавливается в положение N max и блокирует сигналы, идущие на управление рейкой 2 топливного насоса через узел 21 и разрещает прохождение сигналов управления через узел 22. Кроме того, переключатель 20 блокирует следящую систему, поддерживающую постоянную скорость движения транспортного средства, и снимает запрет на прохождение сигналов с задатчика 17, измерителя 16 в блок 15. Благодаря этому разность сигналов действительного значения угловой скорости двигателя 1 с измерителя угловой скорости 16 и с задатчика 17 угловой скорости двигателя ЫЗЯА приводит к появлению управляющего сигнала на выходе блока 15. Угловая скорость со5дд - это угловая скорость двигателя на его внещней скоростной характеристике, при которой N max. Сигнал в соответствии с алгоритмом управления через усилитель 26 сигналов управления гидропередачей и коммутатор 23 воздействует на бесступенчатую передачу 3 так, чтобы угловая скорость двигателя ы-вбыла равна скорости соз/и, установленной на задатчике 17. Формула изобретения Устройство для автоматического регулирования режима работы транспортного средства, содержащее переключатель режимов работы, двигатель с рейкой топливного насоса, связанной с исполнительным механизмом соединенным с усилителем сигналов управления двигателем, связанным через расходомер с делителем напряжения, бесступенчатую передачу, включающую соединенный с двигателем гидронасос с регулирующим органом, соединенным с исполнительным механизмом, и гидромотор с регулирующим органом и исполнительным механизмом, включенный между гидронасосом и нагрузкой, логический и запоминающий блок, ко входам которого подключены переключатель режимов работы и тахогенератор, соединенный с нагрузкой и делителем, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено задатчиками угловой скорости гидромотора и скорости движения транспортного средства, измерителем и задатчиком угловой скорости двигателя, выходы которых соединены с входами логического и запоминающего блока, обострителем, один из входов которого
соединен с делителем, а выход подключен к логическому и запоминающему блоку, узлом блокировки двигателя и узлом блокировки гидропередачи, одни входы которых подключены к логическому и запоминающему блоку, другие входы подключены к переключателю, а выходы соединены соответственна с усилителями сигналов управления двигателем и гидропередачей, блоком управления обострителем и переключателем, вход которого подключен к логическому и запоминающему блоку, а выходы соединены с входами
а
обострителя и переключателя, коммутатором один вход которого связан с усилителем сигналов управления гидропередачей другой - с логическим и запоминающим блоком а выходы соединены с исполнительными механизмами 1идромотора и гидронасоса.
Источники информации, принятые во внимание при экспертизе 1. Коденко М. Н., Лебедев А. Т. Автоматизация транспортных агрегатов.М, «Машиностроение, 1969, с. 140-145.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |
| Система автоматического управления режимами работы транспортного средства | 1981 |
|
SU958152A2 |
| Система автоматического управления режимами работы транспортного средства | 1977 |
|
SU745727A1 |
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1115932A2 |
| Устройство управления транспортным средством | 1986 |
|
SU1402448A1 |
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1127784A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ПОДАЧИ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1972 |
|
SU350597A1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2106265C1 |
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
