(54) СПОСОБ РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ И СКОРОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА
1
Изобретение относится к тяговому электроприводу и может быть применено для регулирования силы тяги и скорости электроподвижного состава.
Известен способ регулирования силы тяги и скорости электроподвижного состава, согласно которому изменяют силу тяги, скорость, ток якоря и ток возбуждения тягового двигателя, сравнивают их с заданными и предельно допустимыми, по величине рассогласования формируют сигнал управления одного из регуляторов и по величине выходного параметра указанного регулятора формируют сигнал управления для другого регулятора 1.
Недостаток указанного способа заключается в том, что он учитывает только потери в двигателе и не учитывает-потери в других элементах силовой цепи, которые соизмеримы с ними.
Цель изобретения - уменьшение потерь энергии.
Поставленная цель достигается тем, что по измеренным величинам токов якоря и возбуждения определяют потери мощности в электроподвижном составе по каждому из
измеренных параметров, сравнивают их по величине рассогласования формируют сигнал коррекции для другого регулятора.
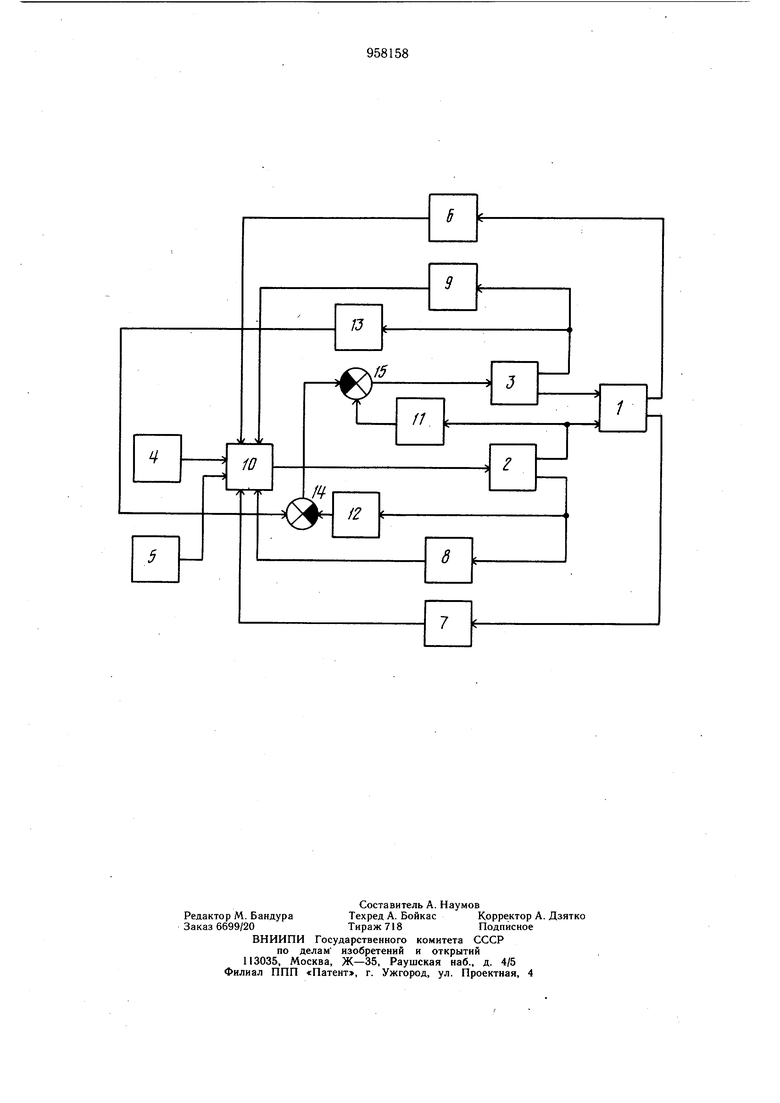
На чертеже представлена блок-схема устройства, поясняющая предлагаемый спо5 соб регулирования.
Устройство содержит тяговый элемент 1 электроподвижного состава, соединенный с регуляторами 2 и 3 токов якоря и возбуждения. Задатчики 4 и 5 и датчики 6 и 7
,0 регулируемых параметров силы тяги и скорости и датчики 8 и 9 токов якоря и возбуждения соединены с входами блока 10 формирования сигнала управления для регулятора 2 тока якоря. Выход регулятора 2 соединен с блоком 11 формирования сигнала управления для регулятора 3. К выходам регуляторов 2 и 3 присоединены блоки 12 и 13 определения потерь мощности по каждому из параметров, Выходы которых соединены с блоком 14 сравнения. Вы2Q ход блока 14 сравнения соединен с одним из входов блока 15 коррекции, другой вход которого соединен с выходом блока 11 формирования сигнала управления, а выход - с входом регулятора 3.
Устройство работает следующим образом.
Привод электроподвижного состава содержит, как правило, кроме тягового двигателя дополнительные элементы (трансформатор, реакторы, фильтры, реостаты, вентильные преобразователи, редукторы и другие), потери энергии в которых соизмеримы с потерями в двигателе и поэтому требуют минимизации. При их учете видоизменяются условия нахождения минимума потерь мощности.
Приближенное условие минимума потерь для электроподвижного состава при заданных параметрах силы тяги F и скорости движения V, т. е. постоянства полезной мощности.
P F-V(1)
и при одновременном регулировании двух исполнительных параметров - токов якоря 1я и возбуждения I тяговых двигателей может быть выражено уравнением
, I( ) Кч,( IB) 1|-Кя1я- Ря 1я 0,(2)
гдeRяиRg- активные сопротивления;
КяиК -постоянные коэффициенты для обобщенных параметров всех элементов силовой цепи (от токоприемника до обода колеса), для цепи якоря и возбуждения соответственно; Кф- нелинейный коэффициент линеаризации кривой намагничивания тягового двигателя (связь IB с магнитным потоком Ф); KI и KV- коэффициенты пропорциональности магнитных и механических потерь в элементах привода, зависящие от частоты перемагничивания и скорости движения.
В уравнении (2) каждое из слагаемых характеризует потери мощности на том или ином участке силовой цепи электроподвижного состава или тягового электропривода, причем первые три слагаемых определяют потери мощности, зависящие от выбора величины регулируемого параметра Ij, два других - от выбора 1я. Величины токов якоря и возбуждения оптимальны по критерию минимума потерь мощности при выполнений условия (2), т. е. если суммарные потери раздельно по параметрам токов якоря и возбуждения равны.
При работе электроподвижного состава с помощью задатчиков 4 и 5 задаются сила тяги и скорость. С датчиков 6-9, силы тяги, скорости, тока якоря и тока возбуждения в блок 10 формирования сигнала управления поступают сигналы, которые сравниваются с заданными и предельно допустимыми, и формируется сигнал для регулятора 2 тока якоря. По величине тока якоря формируется сигнал управления регулятора 3 в блоке 11. Одновременно в блоках 12 и 13 формируются сигналы потерь мощности по току якоря и току возбуждения в отдельности, например, путем вычисления указанных параметров по формуле (2), которые затем сравниваются в блоке 14 сравнения. С блока 14 сравнения сигнал рассогласования подается в блок 15 коррекции, который изменяет сигнал управления для регулятора 3 тока возбуждения.
Таким образом, предлагаемый способ регулирования силы тяги и скорости электроподвижного состава обеспечивает минимальное значение потерь мощности во всем диапазоне изменения регулируемых и исполнительных параметров токов якоря и возбуждения.
Использование предлагаемого способа дает значительный экономический эффект, возрастающий с ростом единичной мощности электропривода. Расчетное уменьщение потерь мощности в силовых цепях восьмиосных электровозов переменного тока - 10-65%, а сокращение расхода энергии на тягу поездов - 1-5%.
Формула изобретения
Способ регулирования силытяги и скорости электроподвижного состава, согласно которому измеряют силу тяги, скорость ток якоря и ток возбуждения тягового двигателя, сравнивают их с заданными и предельно допустимыми, по величине рассогласования «рормируют сигнал управления для одного из регуляторов и по величине выходного параметра указанного регулятора формируют сигнал управления для другого регулятора, отличающийся тем, что, с целью уменьщения потерь энергии, по измеренным величинам токов якоря и возбуждения определяют потери мощности в электроподвижном составе по каждому .|i3 измеренных параметров, сравнивают их и по величине рассогласования формируют сигнал коррекции для другого регулятора.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 7588447, кл. Н 02 Р 5/06, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор мощности тяговых электродвигателей подвижного состава | 1980 |
|
SU965822A1 |
| Способ регулирования скорости тягового электродвигателя | 1979 |
|
SU783071A1 |
| Устройство для автоматического регулирования тягового электродвигателя электроподвижного состава | 1987 |
|
SU1521629A1 |
| Устройство для регулирования тягового электропривода автономного транспортного средства | 1987 |
|
SU1546307A2 |
| Способ управления двигателем тягового привода с последовательным возбуждением | 1987 |
|
SU1600978A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМИ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2349466C2 |
| Устройство для защиты от боксования колесных пар электроподвижного состава | 1985 |
|
SU1426869A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТОКОВ ЯКОРЯ И ВОЗБУЖДЕНИЯ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1995 |
|
RU2088432C1 |
| Устройство для управления реостатным торможением локомотива | 1985 |
|
SU1364506A1 |
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА | 1967 |
|
SU192240A1 |