f
ND
О) 00
о:
Изобретение относится к электрооборудованию подвижного состава железных дорог и предназначено для защиты автоматизированного тягового
;электропривода от боксования колес ных пар.
Целью изобретения является повышение надежности работы устройства. На фиг. 1 приведена функциональная блок-схема устройства для защиты от боксования колесных пар электроподвижного состава; на фиг. 2 - зависимость корректирующего сигнала от величины управляющего сигнала и скорости движения.
Устройство содержит задатчик 1 скорости, выход которого соединен с одним из входов первого элемента 2 сравнения, другой вход которого подключен к выходу датчика 3 скорости, а выход - к одному из входов блока 4 выделения минимального сигнала, другой вход которого соединен с выходом задатчика 5 тока, а выход - с одним из входов второго элемента 6 сравнения, другой вход которого подключен к выходу датчика 7 тока, а выход - к первому входу формирователя 8 управляющего сигнала тиристорного регулятора 9, включенного в цепь питания тягового электродвигателя 10, блок 11 памяти, один вход которого соединен с датчиком 3 скорости, а другой - с выходом формирователя 8 управляющего сигнала, подключенного вторым входом к выходу датчика 12 боксования, а третьим входом - к выходу блока 11 памяти.
Устройство работает следующим образом..
Первый элемент 2 сравнения осуществляет сравнение сигналов пропорциональных заданной V и истинной V скорости электроподвижного состава. Полученный в результате этого сравнения сигнал поступает на вход блока 4 выделения минимального сигнала на другой вход которого поступает сигнал Ij , пропорциональный заданном значению тока тягового электродвигателя. Затем полученный минимальный сигнал сравнивается с сигналом 1 датчика 7 тока с помощью второго элемента 6 сравнения и на основе полученного сигнала рассогласования по току формирователь 8 управляющего сигнала осуществляет регулирование тока
0
5
0
5
0
5
0
5
0
5
тягового электродвигателя 10 через тиристорный регулятор 9. Таким образом, при отсутствии боксования колесных пар устройство обеспечивает стабилизацию тока и скорости тягового электродвигателя, блок 11 памяти и датчик 12 боксования в работе не участвуют.
Появление сигнала боксования на выходе датчика 12 боксования приводит к изменению управляющего сигнала с на выходе формирователя 8 на величину корректирующего сигнала bd(, сформированного блоком 11 памяти. Это вызьюает соответствующее изменение выходного сигнала тиристорного регулятора 9 и тока электродвигателя 10, которое приводит к восстановлению сцепления колесных пар с рельсами. При этом контур регулирования тока разомкнут и сигнал рассогласования по току влияния на сигнал управления о формирователя 8 не оказывает. После исчезновения сигнала боксования контур регулирования тока восстанавливается и продолжается режим стабилизации заданных значений тока и скорости тягового электродвигателя 10.
Условия сцепления колесных пар с рельсами меняются в широком диапазоне. Максимальная сила тяги по сцеплению, в зависимости от условий сцепления, может реализоваться при относительных скоростях скольжения 1,5 - 5%. На одной и той же скорости движения срьш сцепления колеса с рельсом может происходить при разных значениях силы тяги (разном управляющем сигнале оС) и для восстановления сцепления требуется нормированное снижение силы тяги. Величина снижения силы тяги зависит от глубины избыточного проскальзывания, что в свою очередь определяется типом и параметрами тягового электропривода (последовательное или независимое возбуждение двигателей, индивидуальное или групповое регулирование напряжения на двигателях и т.д.). Для одного типа электропривода, реализующего одинаковую силу тяги на разных скоростях, требуется различная величина скольжения силы тяги для восстановления сцепления колеса с рельсом. Это обусловлено тем, что при одной и той же величине приращения скорости скольжения приращение относительной скорости скольжения с ростом скорости движения уменьшается прямо пропорционально.
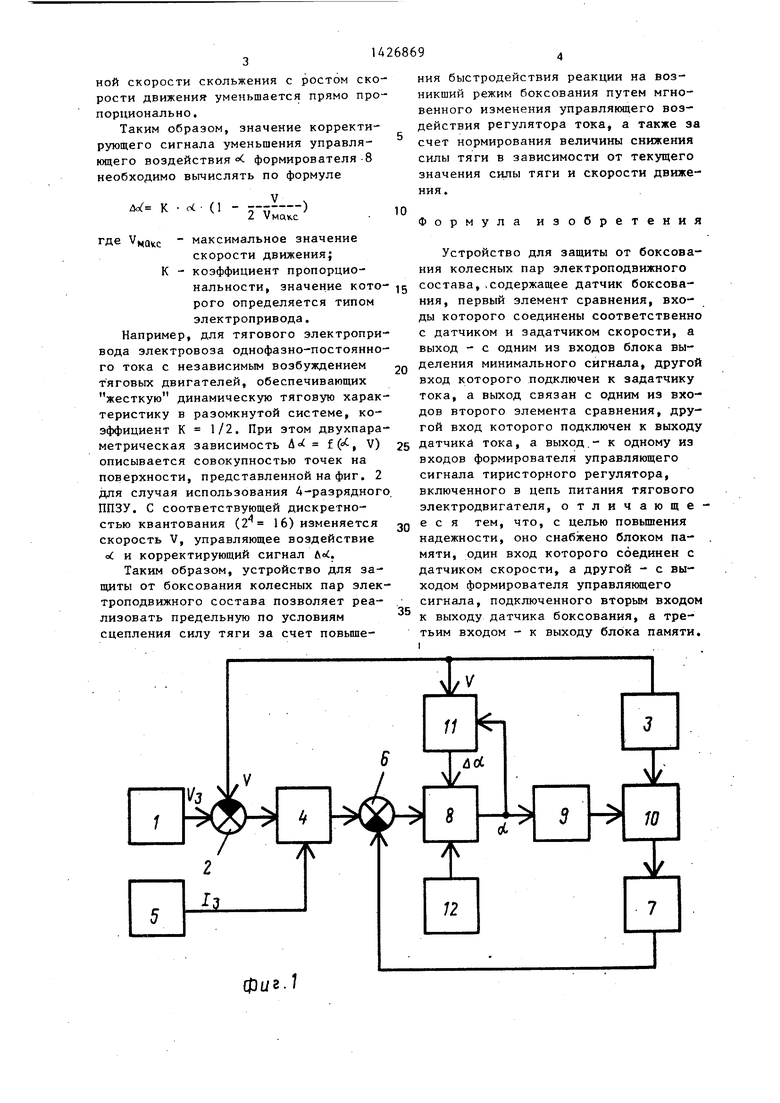
Таким образом, значение корректирующего сигнала уменьшения управляющего воздействия формирователя-8 необходимо вычислять по формуле
& К о(. (1 2 Умакс
ния быстродействия реакции на возникший режим боксования путем мгновенного изменения управляющего воздействия регулятора тока, а также за счет нормирования величины снижения силы тяги в зависимости от текущего значения силы тяги и скорости движения.
Формула изобретения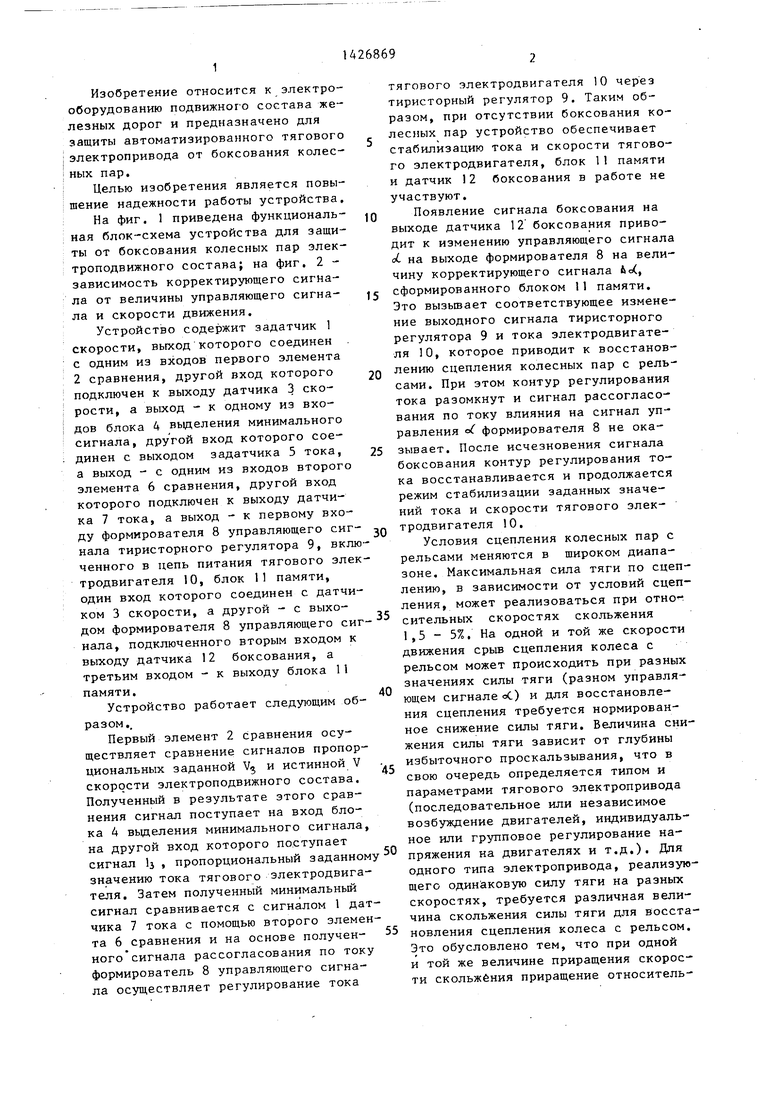
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для регулирования скорости электроподвижного состава | 1988 |
|
SU1564014A1 |
| Устройство для регулирования частоты вращения тяговых двигателей электроподвижного состава | 1980 |
|
SU956326A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Устройство для автоматического регулирования частоты вращения тяговых двигателей электроподвижного состава | 1982 |
|
SU1013316A1 |
| Устройство для защиты от боксования и юза колесных пар электроподвижного состава | 1977 |
|
SU676478A1 |
Изобретение относится к электрооборудованию подвижного состава железных дорог и предназначено для защиты автоматизированного тягового электропривода от боксования колесных пар. Целью изобретения является повышение надежности работы устройства. Устройство содержит эадатчик скорости, выход которого соединен с одним из входов первого элемента сравнения, другой вход которого подключен к выходу датчика скорости, а выход - к одному из входов блока вьщеления минимального сигнала, другой вход которого соединен- с выходом задатчика тока, а выход - с одним КЗ входов второго элемента сравнения, другой вход которого подт ключен к выходу датчика тока, а выход - к первому входу формирователя управляющего сигнала тнристорно- го регулятора, включенного в цепь питания тягового электродвигателя, блок памяти, один вход которого сое- дйнен-с датчиком скорости, а дру-- гой - с выходом формирователя управляющего сигнала, подключенного вторым входом к выходу датчика бок- сования, а третьим входом - к выходу блока памяти. 2 ил. (Л
где Уцд(, - максимальное значение
скорости движения; К - коэффициент пропорциональности, значение которого определяется типом электропривода.
Например, для тягового электропривода электровоза однофазно-постоянного тока с независимым возбуждением т яговых двигателей, обеспечивающих жесткую динамическую тяговую характеристику в разомкнутой системе, коэффициент К 1/2. При этом двухпара- метрическая зависимость Д- f (, V) описывается совокупностью точек на поверхности, представленной на фиг. 2 для случая использования 4-раэрядного ППЗУ. С соответствующей дискретностью квантования (2 16) изменяется скорость V, управляющее воздействие о и корректирующий сигнал Aci.
Таким образом, устройство для защиты от боксования колесных пар электроподвижного состава позволяет реализовать предельную по условиям сцепления силу тяги за счет повьщ1е
фиг.
Устройство для защиты от боксования колесных пар электроподвижного состава,.содержащее датчик боксования, первый элемент сравнения, входы которого соединены соответственно с датчиком и задатчиком скорости, а выход - с одним из входов блока вы- деления минимального сигнала, другой вход которого подключен к задатчику тока, а выход связан с одним из входов второго элемента сравнения, другой вход которого подключен к выходу датчика тока, а выход.- к одному из входов формирователя управляющего сигнала тиристорного регулятора, включенного в цепь питания тягового электродвигателя, отличающееся тем, что, с целью повьщ1ения надежности, оно снабжено блоком памяти, один вход которого соединен с датчиком скорости, а другой - с выходом формирователя управляющего сигнала, подключенного вторым входом к выходу датчика боксования, а третьим входом - к выходу блока памяти. I
1В
72
Ad
15 V
фиг. 2
| Устройство для автоматического регулирования токов тяговых двигателей электровозов | 1978 |
|
SU709417A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
