(5) СИСТЕМА СТАБИЛИЗАЦИИ ПОЛУПОГРУЖЕННОГО ПЛАВУЧЕГО СРЕДСТВА

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления движением судна | 1980 |
|
SU893672A1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Имитатор морского волнения | 1981 |
|
SU1116440A2 |
| Устройство для измерения заполненного водой объема помещения судна | 1987 |
|
SU1571404A1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ СУДНА С ПОМОЩЬЮ РУЛЯ | 2018 |
|
RU2707480C1 |
| Анализатор мореходных качеств судна | 1985 |
|
SU1298781A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| СПОСОБ ПЛАВАНИЯ СУДОВ В ЛЕДОВЫХ УСЛОВИЯХ | 2000 |
|
RU2175292C2 |
Изобретение относится к судовой автоматике и используется для стабили зации полупогруженного плавучего средства. Известен стабилизатор углов крена и дифферента корабля на подводных крыльях, который содержит датчик угло вой скорости дифферента, выход которого соединен с первым входом первого сумматора и через первый инвертор с первым входом второго сумматора, задатчик и датчик угла ди())ферента, выходы которых соединены со входами бло ка сравнения, выход которого соединен со вторым входом первого сумматора и через второй инвертор со вторым вхо дом, второго сумматора, датчики обратных связей носового и кормового за- . крылков, выходы которых соединены с третьим входами первого и второго сумматоров соответственно 1. Недостатком этого устройства является то, что использование его приводит к провалам по осадке судна. Это происходит по той причине:, что суда г на подводных крыльях и пЪлупогруженные суда имеют переменный хсэдовой дифферент в зависимости от скорости хо- да. Так, например, при больших скоростях хода и отсутствии стабилизатора ди(|)ферента эти суда имеют большой положительный дифферент, что создает приращение подъемной силы на подврдных крыльях (СПК) или гондолах (ППС) за счет положительного угла атаки. Эта сила удерживает судно от провалов по осадке. При работающем стабилизаторе ди(1)ферента и заданном значении дифферента (1заЯ О ) стабилизатор удерживает Ч О, в результате чего исчезает поддерживающая сила от положительного углаатаки, и судно получает провал по осадке. В результате провала по осадке происходит снижение скорости хода за счетвозрастания сил сопротивления-, ухудшение мореходных качеств судна вследствие увеличения замывов корпуса и ударов
волн о днище, что также приводит к снижению точности стабилизации судна и дополнительным потерям скорости хода.
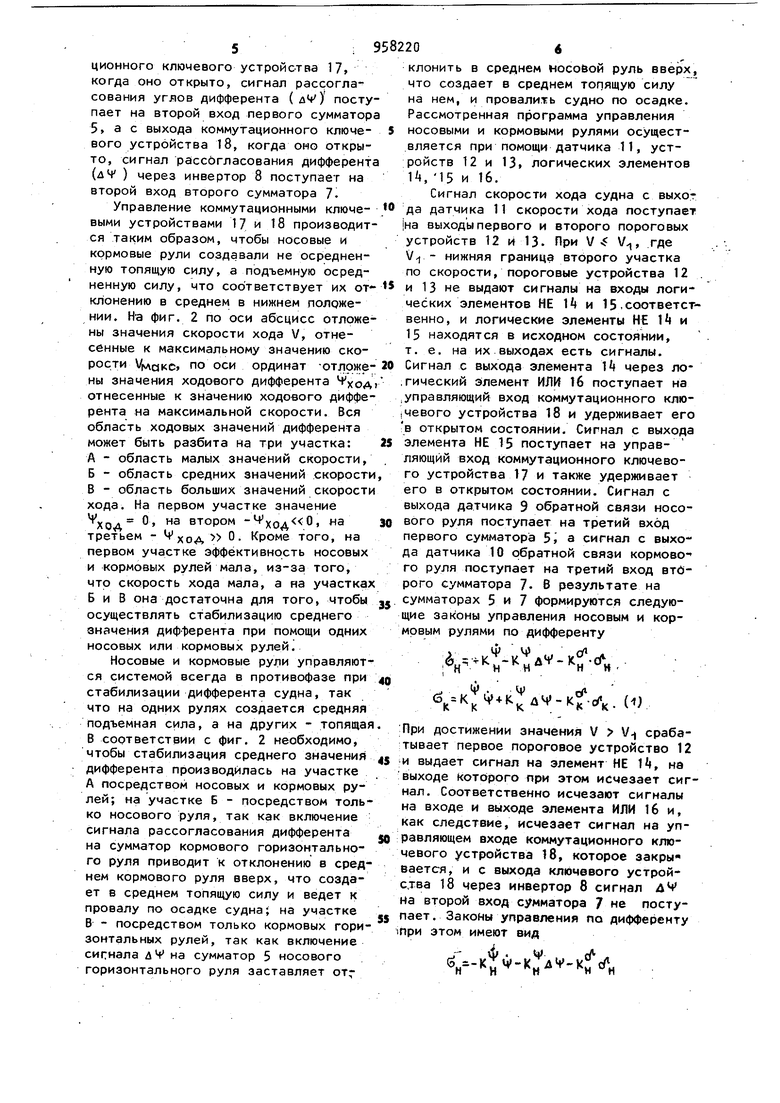
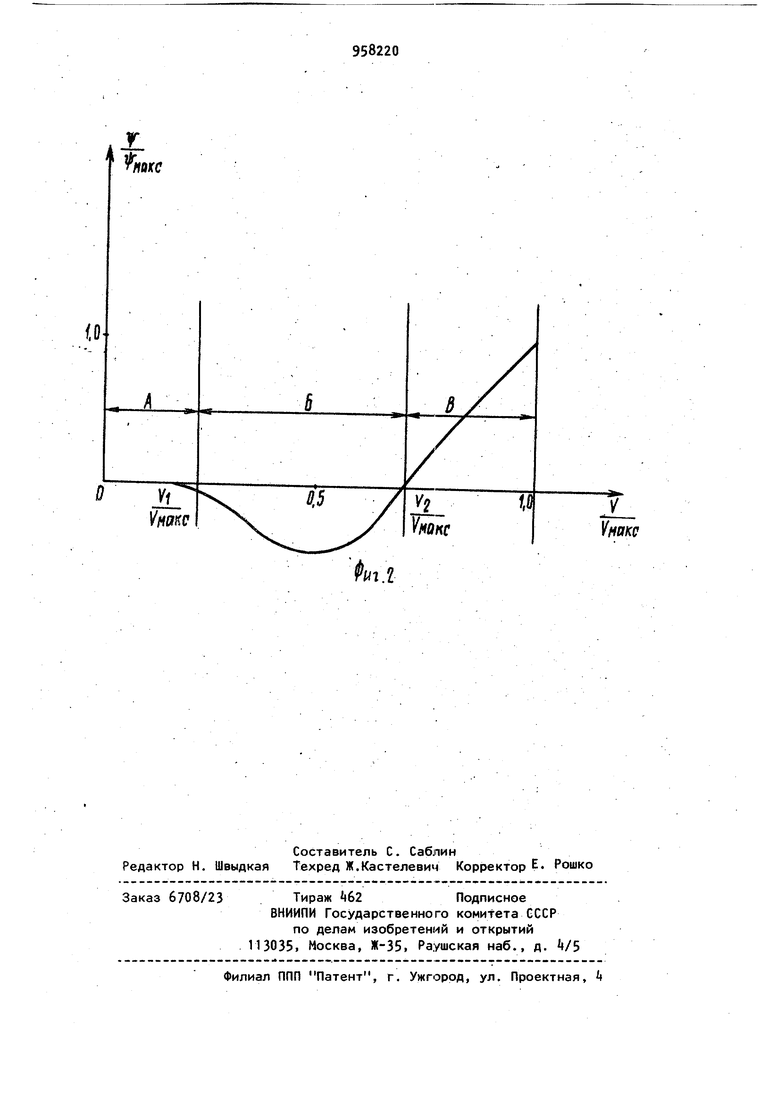
Цель изобретения - улучшение море- 5го сумматора 5 и через первый инверходных качеств и повышение точноститор 6 с первым входом второго суммастабилизации судна.тора 7, второй- инвертор 8, выход коПоставленная цель достигается тем,торого соединен с вторым входом вточто система-стабилизации полупогру- рого сумматора 7, датчики 9 и 10 обженного судна, содержащая задатчик и датчик угла дифферента, выходы которых соединены со входами блока сравнения, датчик угловой скорости дифферента, выход которого соединен с первым входом первого сумматора и через первый инвертор с первым входом второго сумматора, второй инвертор, выхо которого соединен со вторым входом второго сумматора, датчик обратных связей горизонтальных носового и кормового рулей, выходы которых соединен с третьими входами первого и второго сумматоров соответственно, снабжена датчиком скорости хода судна, первым и вторым noporoBbiM устройством, первым и вторым логическим элементом НЕ, логическим элементом ИЛИ, первым и в торым коммутационными ключевыми устройствами, входы которых соединены с выходЪм блока сравнения, а выход первого коммутационного ключевого устройства соединен с .вторым входом первого сумматора, выход второго коммутационного ключевого устройства сое динен с входом второго инвертора, выход датчика скорости хода судна соединен с входами первого и второго пороговых устройств, выходы которых сое динены с входами первого и второго логических элементов НЕ, выход первого логического элемента НЕ, а также выход второго порогового устройства соединен с входами логического элемента ИЛИ, выход которого соединен с управляющим входом второго коммутационного ключевого устройства, а вы ход второго логического элемента НЕ соединен с управляющим входом первого коммутационного ключевого устройства. На фиг. 1 изображена структурнофункциональная схема системы стабили зации полупогруженного судна; на фиг. 2 представлена зависимость в безразмерной .форме ходового дифферен та в функции от скорости хода полупогруженного судна. Система содержит задатчик 1 углов дифферента и Aat4HK 2 углов дифферен
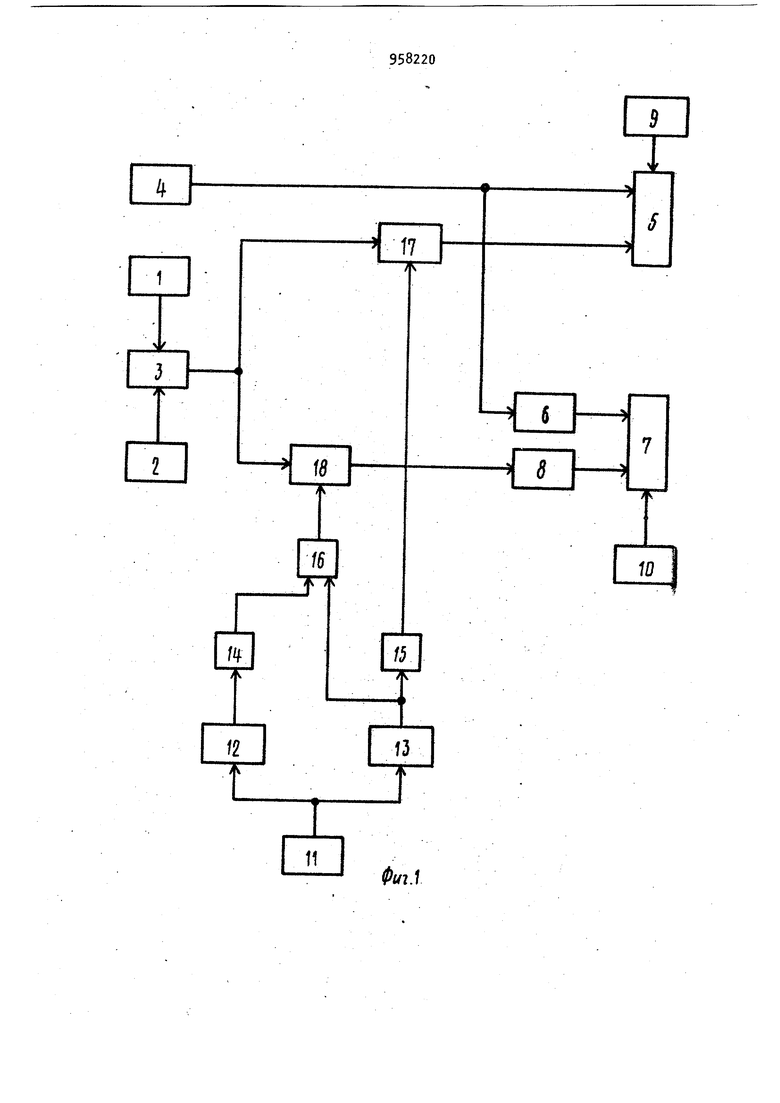
та, выходы которых соединены со вхо дами блока 3 сравнения, датчик k угловой скорости дифферента, выход которого соединен с первым входом перворатных связей горизонтальных носового и кормового рулей, выходы которых соединены с третьими входами первого и второго сумматоров 5 и 7 соответственно. Кроме того, система содержит датчик 11 скорости хода судна, первое и второе пороговые устройства 12 и 13, первый и второй логические элементы НЕ 1й и 15, логический элемент ИЛИ 16, первое и второе коммутационные ключевые устройства 17 и 18, входы которых соединены с выходом блока 3 сравнения, а выход первого коммутационного ключевого устройства 17 соединен с вторым входом первого сумматора 5, выход второго коммутационного ключевого устройства 18 соединен со входом второго инвертора 8, Выход датчика 11 скорости хода судна соединен со входами первого и второго порогов вых устройств 12 и 13, выхрды которых соединены со входами первого и второго логических элементов НЕ Н и 1). Выходы первого логического элемента НЕ Tf и второго порогового устройства 13 соединены со входами логического элемента ИЛИ 16, выход которого соединен с управляющим входом второго коммутационного устройства 18, а выход второго логического элемента НЕ 15 соединен с управляющим входом первого коммутационного ключевого устройства 17. Система стабилизации полупогруженного судна работает следующим образом. Сигнал угловой скорости дифферента поступает с датчика k на первый вход первого сумматора 5 и через инвертор 6 - на первый вход второго сумматора 7. Сигналы заданного значения угла дифферента и текущего значения угла дифферента поступают с выходов задатчика 1 и датчика 2 соответственно на входы блока 3 сравнения. Сигнал рассогласования углов дифферента (лЧ г ,) с выхода .блока 3 сравнения поступает на входы первого и второго Коммутационных ключевых устройств 17 и 18 сооТветствечно. С выхода коммута ционного ключевого устройства 17, когда оно открыто, сигнал рассогласования угяов дифферента ( дУ) поступает на второй вход первого сумматора 5, а с выхода коммутационного ключевого устройства 18, когда оно открыто, сигнал рассогласования дифферента (дЧ ) через инвертор 8 поступает на второй вход второго сумматора 7. Управление коммутационными ключевыми устройствами 1/ и 18 производится таким образом, чтобы носовые и кормовые рули создавали не осредненную топящую силу, а подъемную осредненную силу, что соответствует их от клонению в среднем в нижнем положении. На фиг. 2 по оси абсцисс отложены значения скорости хода V, отнесенные к максимальному значению скорости акс, по оси ординат -отложены значения ходового дифферента 4xoA отнесенные к значению ходового дифферента на максимальной скорости. Вся область ходовых значений дифферента может быть разбита на три участка: А - область малых значений скорости, Б - область средних значений скорости В - область больших значений скорости хода. На первом участке значение ХОА втором 3 третьем - +xoA О- Кроме того, на первом участке эффективность носовых и кормовых рулей мала, из-за того, что скорость хода мала, а на участках Б и В она достаточна для того, чтобы осуществлять стабилизацию среднего значения диф-1)ерента при помощи одних носовых или кормовых рулей. Носовые и кормовые рули управляются системой всегда в противофазе при стабилизации дифферента судна, так что на одних рулях создается средняя подъемная сила, а на других - топящая В соответствии с фиг. 2 необходимо, чтобы стабилизация среднего значения дифферента производилась на участке А посредством носовых и кормовых рулей; на участке Б - посредством только носового руля, так как включение сигнала рассогласования дифферента на сумматор кормового горизонтального руля приводит к отклонению в среднем кормового руля вверх, что создает в среднем топящую силу и ведет к провалу по осадке судна} на участке В - посредством только кормовых горизонтальных рулей, так как включение сигнала дЧ на сумматор 5 носового горизонтального руля заставляет от9206 клонить в среднем носойой руль вверх, что создает в среднем топящую силу на нем, и провалить судно по осадке. Рассмотренная программа управления носовыми и кормовыми рулями осуществляется при помощи датчика 11, устройств 12 и 13. логических элементов 14, 15 и 16. Сигнал скорости хода судна с выхог да датчика 11 скорости хода поступает на выходы первого и второго пороговых устройств 12 и 13- При М f V, где -i нижняя граница второго участка по скорости, пороговые устройства 12 и 13 не выдают сигналы на входы логических элементов НЕ I и 15 .соответственно, и логические элементы НЕ И и 15 находятся в исходном состоянии, т. е. на их выходах есть сигналы. Сигнал с выхода элемента И через логический Элемент ИЛИ 16 поступает на управляющий вход коммутационного клюЧевого устройства 18 и удерживает его в открытом состоянии. Сигнал с выхода элемента НЕ 15 поступает на управляющйй вход коммутационного ключевого устройства 17 и также удерживает его в открытом состоянии. Сигнал с выхода датчика 9 обратной связи носового руля поступает на третий вход первого сумматора 5, а сигнал с выхода датчика 10 обратной связи кормово го руля поступает на третий вход второго сумматора 7- В результате на сумматорах 5 и 7 формируются следующие законы управления носовым и кормовым рулями по дифференту . ц . ф .. ( При достижении значения V V срабатывает первое пороговое устройство 12 и выдает сигнал на элемент НЕ И, на выходе «оторого при этом исчезает сигнал. Соответственно исчезают сигналы на входе и выходе элемента ИЛИ 16 и, как следствие, исчезает сигнал на управляющем входе коммутационного ключевого устройства 18, которое закрывается, и с выхода ключевого устройства 18 через инвертор 8 сигнал ДЧ на второй вход сумматора 7 не поступает. Законы управления по дифференту при этом имеют вид
Поскольку среднее значение сигнала М
равно О, кормовые рули в среднем нахо-s тора и через первый инвертор с пердятся в нулевом положении и не созда в среднем топящей силы. Носовые рули в среднем находятся в нижней положении (фиг. 2) и создают в среднем под емную силу. При V . Vrj срабатывает второе пороговое устройство 13 и выдает сигнал на элемент НЕ 15 а через элемент ИЛИ 1б - на управляющи вход второго ключевого устройства jlB, которое при этом снова открывается и пропускает на сумматор 7 сигнал Л. В то же время на выходе элемента НЕ 15 сигнал исчезает, и коммутационное ключевое ус.тройство 1 закрывается, при этом сигнал не попадает на второй вход первого сумматора 5- На сумматорах 5 и 7 формируются законы управления носовым и кормовым рулями по дифференту в виде . Мри этом среднее положение носового руля нулевое, и он не создает в сред нем топящей силы, в то время как кор мовой руль в среднем создает подъемную силу, удерживая судно от провало по осадке. Использование изобретения позволя ет повысить скорость хода, улучшить мореходные качества и повысить точность стабилизации судна при движении на спокойной воде и волнении. Формула изобретения Система стабилизации полупогружен ного плавучего средства, содержащая задатчик и датчик углов дифферента.
9582208
выходы которых соединены с входами блока сравнения, датчик угловой скорости дифферента, выход которого соединен с первым входом первого суммавым входом второго сумматора, второй инвертор, выход которого соединен с вторым входом второго сумматора, датчики обратных связей горизонтальных носового и кормового рулей, выходы которых соединены с третьими входами первого и второго сумматоров соответственно, отличающаяся тем, что, с целью улучшения мореходных качеств и повышения точности стабилизации судна, она снабжена датчиком скорости хода судна, первым и вторым пороговым устройством, первым и вторым логическим элементом НЕ, логическим элементом ИЛИ, первым и вторым коммутационными ключевыми устройствами, входы которых соединены с выходом блока сравнения, а выход первого коммутационного ключевого устройства соединен с вторым входом первого сумматора, выход второго коммутационного, ключевого устройства соединен с входом второго инвертора, выход датчика скорости хода судна соединен с входами первого и второго пороговых устройств, выходы которых соединены с входами первого и второго логических элементов НЕ, выход первого логического элемента НЕ, а также выход второго порогового устройства соединены с входами логического элемента ИЛИ, выход которого соединен с управляющим входом второго коммутационного ключевого устройства, а выход второго логического элемента НЕ соединен с управляющим входом первого коммутационного ключевого устройства. I Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 38473Ь кл. В 63 В 39/Of, 1971.
И
нвкс
f,fl
j/ Унакс
