Изобретение относится к области судостроения и предназначено для управления движением и автоматической швартовки судна к пирсу.
Известна аппаратура автоматического управления движением судна (патент России 2144884), обеспечивающая автоматическое удержание судна на заданном курсе с использованием в качестве исполнительного устройства кормовых рулей и информации о угле курса, угловой скорости судна и угле перекладки руля (для построения закона управления).
Известна также “Аппаратура автоматического управления движением судна”, патент России №2223197 (заявка №2003109065/11), принятая нами в качестве прототипа, содержащая задатчик и датчик угла, датчик угловой скорости судна, датчик положения кормового руля, выходы которых подключены к входу сумматора-усилителя (вычислителя). Выход суммирующего усилителя соединен со входом кормового рулевого привода. Используется также носовой рулевой привод, ко входу которого подключен через второй сумматор-усилитель датчик положения носового руля и датчик угла дрейфа.
Рассматриваемый авторулевой обеспечивает стабилизацию и переход на новый курс в автоматическом режиме. Однако при швартовке судна к пирсу оба авторулевых, отмеченных выше, выключаются и судоводитель переходит на ручное управление. Процесс швартовки требует не только большой подготовки, но и искусства, т.к. сложен и весьма ответственен, а следовательно, большого напряжения и внимания от судоводителя.
Задачей предлагаемого изобретения является создание системы автоматического управления движением судна, обеспечивающей не только стабилизацию и маневры при движении в открытом море, но и автоматическую швартовку судна к пирсу. (В том числе и режим одновременной стабилизации как угла курса, так и заданного значения угла дрейфа, начиная от нулевого значения.)
Предлагаемая система позволяет исключить ручную швартовку и, что особенно важно, оптимизировать процесс швартовки. Это сокращает время и резко повышает безопасность плавания, т.к. одновременно со стабилизацией заданного курса стабилизируется одновременно и заданное значение угла дрейфа.
Автоматическое управление кормовым рулем осуществляется аналогично прототипу (в качестве датчика направления движения принимается датчик угла курса). Управление же носовым рулевым приводом существенно отличается от прототипа, т.к. оно должно обеспечивать боковое смещение судна на фиксированную заранее заданную величину:
ΔУ=У-Узд,
где У, Узд - текущее и заданное боковое смещение судна.
Одновременно при боковом движении (швартовке) судна обеспечивается ограничение по величине угла дрейфа, последнее достигается введением в закон управления носовым рулем уставки, сигнал которой пропорционален величине ограничения на допустимый угол дрейфа. Закон управления носовым рулем имеет вид:
d/dtδнос=К1·ΔУ+К2·(β-βдоп)-К3·δ нос

где:
- d/dtδнос, δнос - угловая скорость и угол перекладки носового руля,
-  - модули текущего угла дрейфа и величины допустимого его значения,
- модули текущего угла дрейфа и величины допустимого его значения,
ΔУ=У-Узд - текущее и заданное значение бокового смещения судна,
- Кi - коэффициенты регулирования.
В случае специального режима стабилизации курса с одновременной стабилизацией фиксированного угла дрейфа в зависимоси (1) значение допустимого угла дрейфа βдоп переводится в заданное значение βзд, а коэффициенты регулирования принимаются: К1=0, K2=constant.
Следует отметить, что функционирование носового руля в соответствии с зависимостью (1) одновременно приводит к отклонению судна по курсу, а кормовой руль, устраняя это отклонение, “помогает” работе носового руля, увеличивая как бы его эффективность.
Достижение поставленной задачи осуществляется благодаря дополнению известной системы датчиком и задатчиком бокового сноса судна, задатчиком допустимого угла дрейфа и блоком логики, в котором осуществляется перестройка закона управления (1) для обеспечения плавного подхода судна к пирсу. Оптимальность режима достигается благодаря разделению основных функций, которые выполняет кормовой и носовой руль (или подруливающее устройство).
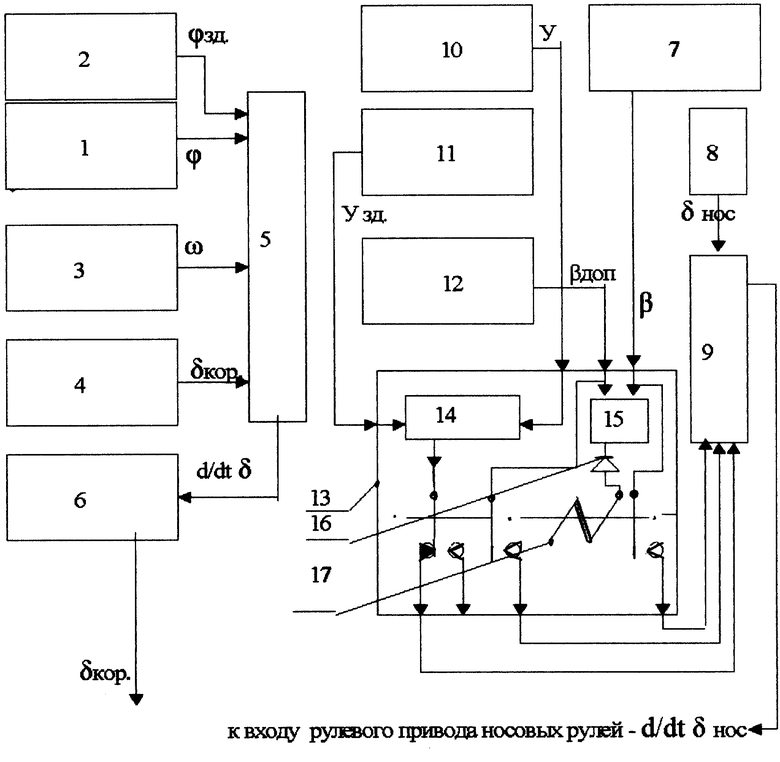
Блок логики (см чертеж) содержит алгебраический сумматор, сумматор модулей двух сигналов, диод и электромагнитное реле с нормально-разомкнутой и нормально-замкнутой контактными группами, которые через первый и второй выходы блока логики соединены соответственно с третьим и четвертым входами второго сумматора-усилителя, выходы датчика и задатчика бокового смещения судна через первый и второй входы блока логики, алгебраический сумматор и нормально-замкнутый контакт электромагнитного реле соединен с третьим выходом блока логики, первый выход которого соединен через нормально-разомкнутую контактную группу электромагнитного реле с третьим входом блока логики и первым входом сумматора модулей двух сигналов, второй вход которого через четвертый вход блока логики соединен с выходом датчика угла дрейфа, а выход сумматора модулей двух сигналов через диод соединен с обмоткой управления электромагнитного реле.
На чертеже представлена функциональная схема системы автоматического управления судном, которая содержит датчик и задатчик курса 1, 2, датчик угловой скорости 3, датчик кормовых рулей 4, первый сумматор-усилитель 5, рулевой привод кормовых рулей 6, датчик угла дрейфа 7, датчик носовых рулей 8, второй сумматор-усилитель 9, датчик и задатчик бокового смещения судна 10,11, задатчик допустимого угла дрейфа 12, блок логики 13, алгебраический сумматор 14, сумматор модулей двух сигналов 15, диод 16 и электромагнитное реле 17.
При реализации системы управления: датчик 1, задатчик курса 2, датчик угла дрейфа 7, датчик носовых рулей 8, датчик и задатчик бокового смещения 10, 11 и задатчик допустимого угла дрефа 12 - это преобразователи угла поворота в напряжение с ошибкой в точности преобразаватели не хуже 3-5%, первый и второй сумматоры-усилители 5, 9 могут быть реализованы на микросхеме типа 140 УД-6, сумматор модулей двух сигналов 15, электромагнитное реле 17 типовое с первой контактной группой на размыкание и второй контактной группой на замыкание. Каких-либо дополнительных требований к серийному рулевому приводу 6 не выдвигается.
Описание работы системы управления движением судна.
При подходе к пирсу судоводитель устанавливает в системе:
- заданное значение угла курса с помощью задатчика 2,
- заданное значение величины бокового перехода - задатчиком бокового смещения 11,
- значение величины допустимой скорости подхода к пирсу, используя задатчик допустимого угла дрейфа и скорости хода судна, снижая обороты гребного винта (последняя операция проводится вплоть до окончания швартовки).
Рассмотрим, как будет выполняться процесс швартовки судна в системе. Судно двигается по заданному направлению движения автоматически - пусть значения текущего и заданного курса совпадают ϕ=ϕзд. При отклонении судна от заданного направления движения сигналы на выходе датчика 1 и задатчика 2 станут разными. Это приведет к появлению сигнала на выходе первого сумматора усилителя 5, а следовательно, к появлению угловой скорости перекладки кормового руля d/dtδкор. В момент, когда сигнал отрицательной обратной связи, вырабатываемый датчиком кормового руля 4 (который также поступает на вход первого сумматора-усилителя 5), окажется равным сигналу рассогласования по углу курса Δϕ=ϕ-ϕзд. На выходе усилителя 5 сигнал станет равным нулю и отклоненный кормовой руль остановится и создаст нужный момент для возвращения судна к заданному направлению движения. При выходе судна на заданное направление движения Δϕ=0 кормовой руль возвратится в балансировочное положение. Сигнал угловой скорости ω, вырабатываемый датчиком угловой скорости 3, необходим для обеспечения требуемого запаса устойчивости замкнутой системы. Таким образом формируется следующий закон управления кормовым рулем:

где:
- Δϕ=ϕ-ϕзд - отклонение судна от заданного курса,
- d/dtδкор, δкор - угловая скорость и угол перекладки кормового руля,
- ϕ-ϕзд -текущий и заданный угол курса,
- Кi – коэффициенты регулирования, i=1, 2, 3.
В момент начала швартовки судоводитель снижает скорость хода судна и устанавливает заданное значение бокового смещения Узд, отличное от текущего значения У. Это приведет к созданию угла дрейфа β (относительно дна).
Рассмотрим процесс набора судном боковой скорости (бокового движения - угла дрейфа).
Текущее и заданное значение бокового смещения, не равное нулю: появится напряжение = У-Узд, которое с датчика и задатчика бокового смещения судна 10, 11 поступит на первый и второй входы блока логики 13, далее через алгебраический сумматор 14 и нормально-замкнутую контактную группу электромагнитного реле 17, третий выход блока логики - на четвертый вход второго сумматора-усилителя 9. На выходе второго сумматора-усилителя выработается сигнал, который поступит на вход рулевого привода носового руля (или подруливающего устройства). Это создаст боковую силу, приложенную к судну, и последнее начнет дрейфовать относительно продольной оси - приближаться к пирсу. В соответствии с зависимостью (1) управление будет иметь вид:

при: 
Сигнал, пропорциональный углу перекладки носового руля δ нос поступает на второй вход второго суммирующего усилителя 9 с выхода датчика носового руля 8.
(При этом воздействие отклоненного носового руля вызовет отклонение судна от заданного направления движения, последнее будет устраняться отклонением кормового руля, приводя к дополнительному увеличению угла дрейфа и ускоряя тем самым процесс швартовки. Существенно заметить, что в существующих авторулевых принят не “ПД” - закон управления, описанный нами, см. зависимость (2), а “ПИД”, в котором обеспечивается астатизм управления по курсу).
После того как судоводитель установит не нулевое допустимое значение угла дрейфа  и если будет выполняться второе условие в зависимости (1):
и если будет выполняться второе условие в зависимости (1):  , сумматор модулей двух сигналов (15) включится и на выходе его появится напряжение, приводящее к срабатыванию электромагнитного реле 17. При этом разорвется цепь сигнала ΔУ и включится сигнал (β-βдоп.). Рассмотрим цепи прохождения этого сигнала на вход привода носового руля. Сигналы (β-βдоп.) вырабатываются на выходах датчика угла дрейфа 7 и задатчика допустимого угла дрейфа 12. Первый сигнал β поступает через четвертый вход блока логики - замкнувшуюся нормально-разомкнутую контактную группу электромагнитного реле 17 и первый выход блока логики на третий вход второго суммирующего усилителя 9, а ненулевой сигнал допустимого угла дрейфа с датчика 12 на первый вход второго суммирующего усилителя 9. Это приведет к стабилизации угла дрейфа на значении βдоп. Путем увеличения или ослабления отклонения носового руля, т.е. при этом зависимость (1) преобразуется к виду:
, сумматор модулей двух сигналов (15) включится и на выходе его появится напряжение, приводящее к срабатыванию электромагнитного реле 17. При этом разорвется цепь сигнала ΔУ и включится сигнал (β-βдоп.). Рассмотрим цепи прохождения этого сигнала на вход привода носового руля. Сигналы (β-βдоп.) вырабатываются на выходах датчика угла дрейфа 7 и задатчика допустимого угла дрейфа 12. Первый сигнал β поступает через четвертый вход блока логики - замкнувшуюся нормально-разомкнутую контактную группу электромагнитного реле 17 и первый выход блока логики на третий вход второго суммирующего усилителя 9, а ненулевой сигнал допустимого угла дрейфа с датчика 12 на первый вход второго суммирующего усилителя 9. Это приведет к стабилизации угла дрейфа на значении βдоп. Путем увеличения или ослабления отклонения носового руля, т.е. при этом зависимость (1) преобразуется к виду:

при: 
При равенстве текущего угла дрейфа допустимому значению или при меньшей величине электромагнитное реле отключается и управление носового руля осуществляется по зависимости (1а).
Проведенное моделирование подтвердило работоспособность и высокую эффективность использования предложенной системы автоматического управления судном, включая режим автоматической стабилизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ | 2010 |
|
RU2424944C1 |
| Система управления движением судна с дублированием каналов курса и резервным управлением по курсу | 2017 |
|
RU2660193C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДХОДА СУДНА К ПРИЧАЛУ | 2009 |
|
RU2403169C1 |
Изобретение относится к области судовождения, в частности к управлению движением судна как в открытых акваториях, так и в узкостях по заданному фарватеру. Система автоматического управления судном содержит датчик и задатчик курса, датчик угловой скорости, датчик кормовых рулей, выходы которых подключены к входам первого сумматора-усилителя, выход которого соединен со входом рулевого привода кормовых рулей, датчик угла дрейфа и датчик носовых рулей, выход которого подключен к первому входу второго сумматора-усилителя. Кроме того, в состав системы введены датчик и задатчик бокового смещения судна, задатчик допустимого угла дрейфа и блок логики, содержащий алгебраический сумматор, сумматор модулей двух сигналов, диод и электромагнитное реле с двумя нормально-разомкнутыми и нормально-замкнутой контактными группами. Достигается автоматическое движение судна с заданным углом дрейфа и заданным боковым перемещением (швартовкой) при одновременной стабилизации заданного курса. 1 ил.
Система автоматического управления судном, содержащая датчик и задатчик курса, датчик угловой скорости, датчик кормовых рулей, выходы которых подключены к входам первого сумматора-усилителя, выход которого соединен со входом рулевого привода кормовых рулей, датчик угла дрейфа и датчик носовых рулей, выход которого подключен к первому входу второго сумматора-усилителя, отличающаяся тем, что введены датчик и задатчик бокового смещения судна, задатчик допустимого угла дрейфа и блок логики, содержащий алгебраический сумматор, сумматор модулей двух сигналов, диод и электромагнитное реле с двумя нормально-разомкнутыми и нормально-замкнутой контактными группами, нормально-разомкнутые контакты электромагнитного реле через первый и второй выходы блока логики соединены соответственно с вторым и третьим входами второго сумматора-усилителя, выходы датчика и задатчика бокового смещения судна через первый и второй входы блока логики, алгебраический сумматор и нормально-замкнутую контактную группу электромагнитного реле соединены с третьим выходом блока логики, третий вход блока логики соединен с первым входом сумматора модулей двух сигналов и первой нормально-разомкнутой контактной группой, а также с выходом датчика угла дрейфа, четвертый вход блока логики соединен с вторым входом сумматора модулей двух сигналов и второй нормально-разомкнутой контактной группой электромагнитного реле, а также с выходом задатчика допустимого угла дрейфа, выход сумматора модулей двух сигналов через диод соединен с обмоткой управления электромагнитного реле.
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| US 3927635 А, 23.12.1975 | |||
| Устройство для подвода жидких компонентов в ферментатор | 1982 |
|
SU1068474A1 |

