Изобретение относится к аналоговой измерительной технике, предназначено для определения (анализа) мореходных качеств судов различных классов и является усовершенствованием известного устройства по авт. ев, № 1120372.
Цель изобретения - повышение точности моделирования мореходных качеств судна.
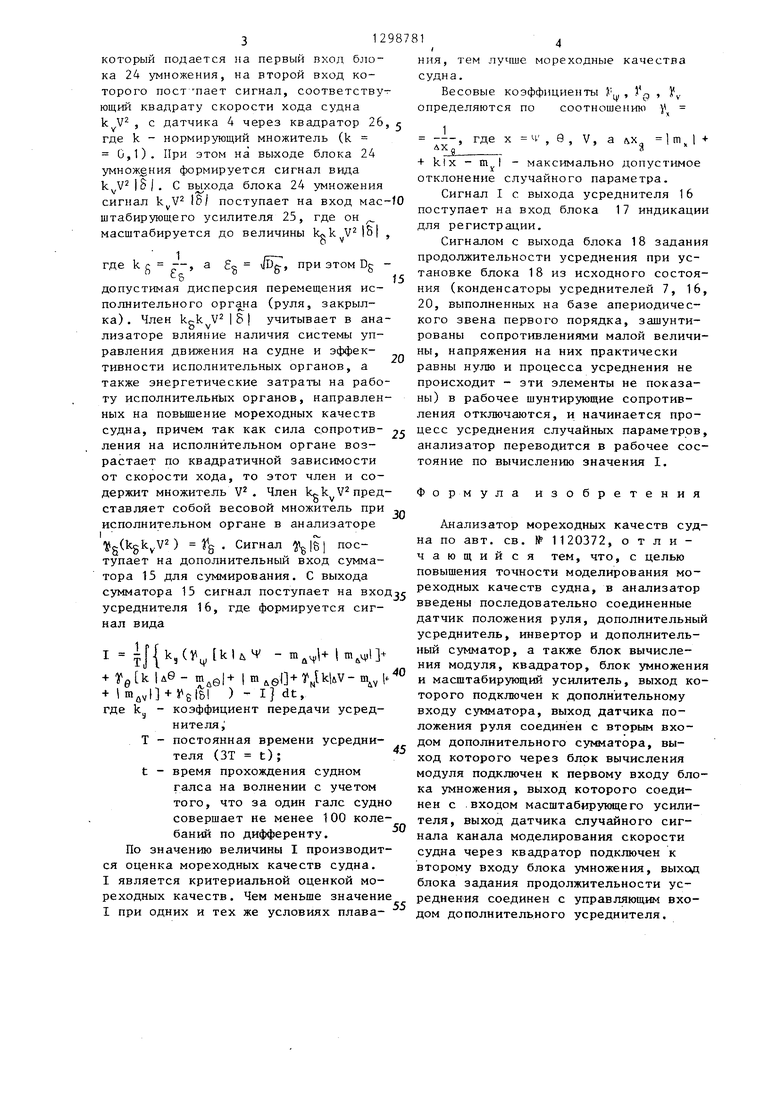
На фиг.1 и 2 представлена структурная схема анализатора мореходных качеств, судна.
Анализатор содержит канал 1 моделирования дифферента, канал 2 моделирования крена и канал 3 моделирования скорости судна, каждый из которых включает датчик 4 случайного сигнала, задатчик 5 постоянного сигнала,
13. На выходе сумматора 8 получае сигнал вида ( t,- ), крторый п ется на вход блока 9 вычисления м
ля, где формируется сигнал вида 5 (йф- m у|. С выхода блока 9 вычис ния модуля сигнал поступает на вх масштабирующего усилителя 10, где сигнал масштабируется до значения
fm
10
дч
где k - коэффициент с
f5
переменной и постоянной составляю отклонений случайного параметра. нормального закона распределения чайной величины k 3. С выхода лителя 1 О сигнал поступает на вхо сумматора 11. С выхода усреднител сигнал m .р подается на вход бло 14 вычисления модуля, где формир сигнал -вида ((,, который пода на вход сумматора 11. На выходе
блок 6 вычитания, усреднитель 7, пер- О матора 11 получается сигнал вида
kU
} +
вый сумматор 8, второй блок 9 вычисления модуля, второй масштабирующий усилитель 10, второй сумматор 11,, первый масштабирующий усилитель 12, инвертор 13, первый блок 14 вычисления модуля, а также сумматор 15, усреднитель 16, блок 17 индикации, бло 18 задания продолжительности усреднения, датчик 19 положения руля, дополнительный усреднитель 20, инвертор 21, дополнительный сумматор 22 у блок 23 вычисления модуля, блок 24 умножения, масштабирующий усилитель 25, квадратор 26. Совокупность датчика 19,усреднителя 20, инвертора 21, дополнительного сумматора 22, блока 23 вычисления модуля, блока 24 умножения, масштабирующего усилителя 25, квадратора 26 составляет кангш 27 вычисления переменной составляющей отклонений исполнительных органов.
Рассмотрим работу анализатора на примере канала 1 моделирования дифферента. Сигналы с выходов датчика 4 и задатчика 5 поступают на входы блока 6 вычитания. Сигнал рассогласования дифферента &iV с выхода блока 6
поступает на вход инвертора 21, г он инвертируется и далее подается вход сумматора 22, на другой вход торого подается сигнал с выхода д
поступает на вход усреднителя 7, где ..,
ff, чика 19 положения руля. На выходе производится вычисление оценки мате- 50
сумматора 22 получаем сигнал вида (S- mg) S J, т.е. в критериально оценке учитывается только перемен составляющая отклонения руля, так именно она оределяет умерение кач судна.
матического ожидания по соотношению
1m
iV
- ( - ,) dt, и на вход
инвертора 13, где производится}его инвертировгшие. С выхода усреднителя
7 сигаал m
лФ
подается на первый вход
сумматора 8, на второй вход которого подается сигнал с выхода инвертора
а1298781 2
13. На выходе сумматора 8 получается сигнал вида ( t,- ), крторый подается на вход блока 9 вычисления модуля, где формируется сигнал вида (йф- m у|. С выхода блока 9 вычисления модуля сигнал поступает на вход масштабирующего усилителя 10, где сигнал масштабируется до значения
fm
дч
где k - коэффициент связи
переменной и постоянной составляющих отклонений случайного параметра. Для нормального закона распределения случайной величины k 3. С выхода усилителя 1 О сигнал поступает на вход сумматора 11. С выхода усреднителя 7 сигнал m .р подается на вход блока 14 вычисления модуля, где формируется сигнал -вида ((,, который подается на вход сумматора 11. На выходе сумО матора 11 получается сигнал вида
0
5
kU
m
uUl
} +
m
ьЧ1
который подается
на вход масштабируюш;его усилителя 12, где сигнал масштабируется до значения
syik/ дЧ - m
йЧ
тп
йЧ
О,
где весо5 вой коэффициент дифферента.
Аналогичные выражения по крену© и скорости V получаются на выходах масштабирующих усилителей 12 в каналах 2 и 3 моделирования крена и скорости.
С выходов усилителей 12 сигналы поступают на соответствующие входы сумматора 15.
Работа дополнительно введенной части анализатора происходит следующим образом.
Сигнал с выхода датчика 19 положения руля о поступает на вход усреднителя 20, на котором производится вычисление оценки математического ожидания руля mg по соотношению
5
0
l|(S-mJdt.
5 X J
о с выхода усреднителя 20 сигнал mgпоступает на вход инвертора 21, где он инвертируется и далее подается на вход сумматора 22, на другой вход которого подается сигнал с выхода дат..,
чика 19 положения руля. На выходе
сумматора 22 получаем сигнал вида (S- mg) S J, т.е. в критериальной оценке учитывается только переменная составляющая отклонения руля, так как именно она оределяет умерение качки судна.
С выхода сумматора 22 сигнал подается на вход блока 23 вычисления мо- ДУ.ПЯ, где формируется сигнал вида181.
который подается iia первый вход блока 24 умножения, на второй вход которого пост пает сигнал, соответствующий квадрату скорости хода судна k V , с датчика 4 через квадратор 26, где k - нормирующий множитель (k 0,1). При этом на выходе блока 24 умнож§ния формируется сигнал вида . С выхода блока 24 умножения сигнал IS/ поступает на вход мас-fO штабирующего усилителя 25, где он масштабируется до величины ,
и
1
где kj --, а g , при этом Dg б
допустимая дисперсия перемещения исполнительного органа (руля, закрылка) . Член | S | учитывает в анализаторе влияние наличия системы управления движения на судне и эффективности исполнительных органов, а также энергетические затраты на работу исполнительных органов, направленных на повышение мореходных качеств судна, причем так как сила сопротив- ления на исполнительном органе возрастает по квадратичной зависимости от скорости хода, то этот член и содержит множитель V. Член kgk V представляет собой весовой множитель при исполнительном органе в анализаторе
(kgk.V2) . Сигнал поступает на дополнительный вход сумматора 15 для суммирования. С выхода сумматора 15 сигнал поступает на вход усреднителя 16, где формируется сигнал вида
I fJ{k,(V,,kU4 - |т,ц,1 + |in ef +rJkl&V-m,l
0 - А;ЛЬ + imuvn +
где k
) - I dt,
коэффициент передачи усреднителя j
Т - постоянная времени усреднителя (ЗТ t) ;
t - время прохождения судном галса на волнении с учетом того, что за один галс судно совершает не менее 100 колебаний по дифференту. По значению величины I производится оценка мореходных качеств судна. I является критериальной оценкой мореходных качеств. Чем меньше значение
I при одних и тех же условиях плава
ния, тем лучше мореходные качества судна.
Весовые коэффициенты У определяются по
V V я V
IV - 0 соотношеник у
, -fO ,
20
15
25д
30
40
ое
45
50
1 ---, где
ЛХд
X Н
V, а лх 1т,
55
+ klx - - максимально допустимое отклонение случайного параметра.
Сигнал I с выхода усреднителя 16 поступает на вход блока 17 индикации для регистрации.
Сигналом с выхода блока 18 задания продолжительности усреднения при установке блока 18 из исходного состояния (конденсаторы усреднителей 7, 16, 20, выполненных на базе апериодического звена первого порядка, зашунти- рованы сопротивлениями малой величины, напряжения на них практически равны нулю и процесса усреднения не происходит - эти элементы не показаны) в рабочее шунтирующие сопротивления отключаются, и начинается процесс усреднения случайных параметров, анализатор переводится в рабочее состояние по вычислению значения I.
Формула изобретения
Анализатор мореходных качеств судна по авт. св. № 1120372, отличающийся тем, что, с целью повышения точности моделирования мореходных качеств судна, в анализатор введены последовательно соединенные датчик положения руля, дополнительный усреднитель, инвертор и дополнительный сумматор, а также блок вычисления модуля, квадратор, блок умножения и масштабирующий усилитель, выход которого подключен к дополнительному входу сумматора, выход датчика положения руля соединен с вторым входом дополнительного сумматора, выход которого через блок вычисления модуля подключен к первому входу блока умножения, выход которого соединен с .входом масштабирующего усилителя, выход датчика случайного сигнала канала моделирования скорости судна через квадратор подключен к второму входу блока умножения, выход блока задания продолжительности ус- реднен ия соединен с управляющим входом дополнительного усреднителя.
Редактор В.Данко
Составитель И.Дубинина
Техред И,Попович Корректор Л.Пилипенко
Заказ 892/53 Тираж 673Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий t.t3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4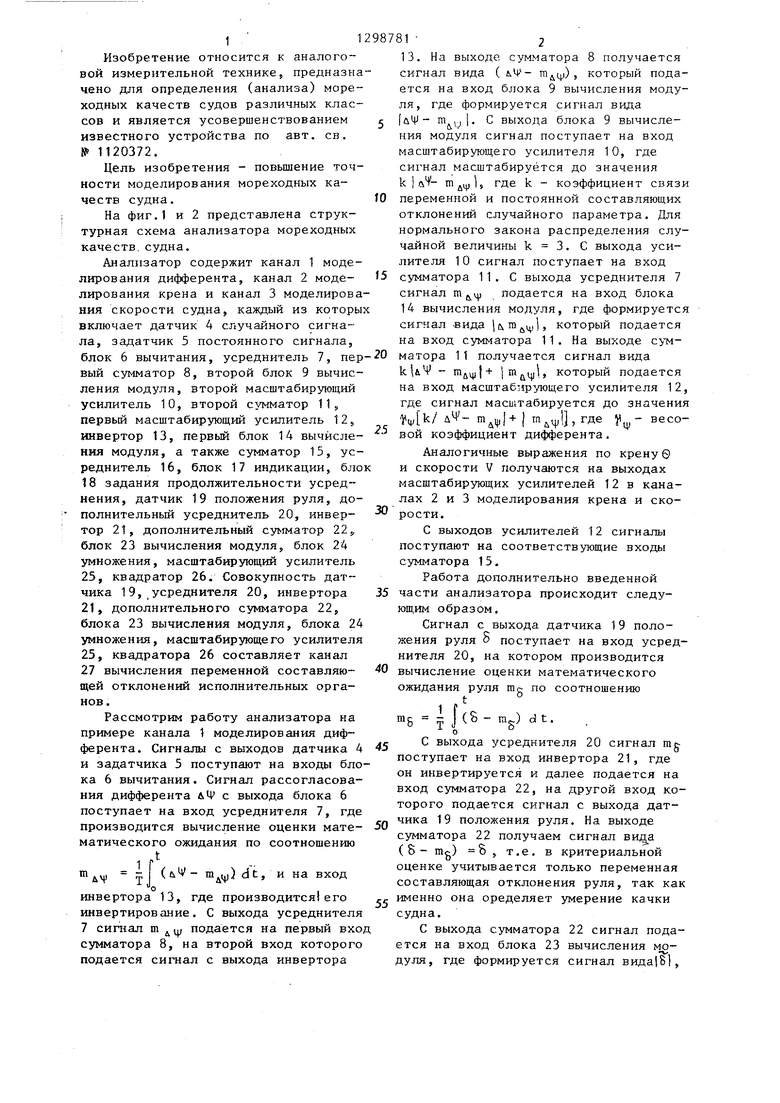
| название | год | авторы | номер документа |
|---|---|---|---|
| Анализатор мореходных качеств судна | 1983 |
|
SU1120372A1 |
| Устройство для оценки мореходных качеств судна | 1983 |
|
SU1160457A2 |
| Устройство для оценки мореходных качеств судна | 1981 |
|
SU1020832A1 |
| Система стабилизации полупогруженного плавучего средства | 1981 |
|
SU958220A1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| Устройство для определения стационарности случайных процессов | 1983 |
|
SU1142850A2 |
| СПОСОБ ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2000 |
|
RU2180131C1 |
| Имитатор морского волнения | 1981 |
|
SU1116440A2 |
| СИСТЕМА КОМПЛЕКСИРОВАННЫХ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ КОРАБЛЯ | 1993 |
|
RU2065197C1 |
| Комплексное устройство контроля параметров | 1988 |
|
SU1520482A1 |
Изобретение относится к аналоговой измерительной технике. Цель изобретения - повьшение точности моделирования мореходных качеств судна. Анализатор позволяет определить интегральную оценку морехрдных качеств судна как взвешенную интегральную сумму параметров качки, потери скорости хода и отклонений исполнительных органов (ИО), например рулей, при движении судна на волнении. Для этого в устройство, содержащее три идентичных канала моделирования переменных и постоянных отклонений дифферента, крена и потери скорости хода, а также сумматор, индикатор и блок задания- продолжительности усреднения, введен канал вычисления переменной составляющей отклонений 1Ю, коэффициент усиления которого имеет квгщратичную зависимость от величины скорости хода. При этом повышение точности моделирования мореходных качеств судна достигается вследствие учета влияния на мореходные качества судна установ- S ки на нем cиcтe ftl управления движением, неодинаковой эффективности ИО у различных судов и энергетических затрат на управление ИО. 2 ил. (Л to со 00 оо
| Анализатор мореходных качеств судна | 1983 |
|
SU1120372A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
