(Sk) ГИДРАВЛИЧЕСКИЙ ПРИВОД СУДОВОГО РУЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовая рулевая гидравлическая машина | 1988 |
|
SU1728083A1 |
| Электрогидравлическая судовая рулевая машина | 1981 |
|
SU958226A1 |
| Гидравлический привод судовой рулевой машины | 1983 |
|
SU1109337A1 |
| Гидравлический привод руля судна | 1980 |
|
SU931590A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU994340A1 |
| Гидравлический привод судовой рулевой машины | 1984 |
|
SU1197939A1 |
| Электрогидравлическая рулевая машина | 1985 |
|
SU1268471A1 |
| Электрогидравлическая судовая рулевая машина | 1980 |
|
SU937269A1 |
| Судовая электрогидравлическая рулевая машина | 1980 |
|
SU925760A1 |
| Гидравлический привод руля | 1980 |
|
SU950594A1 |
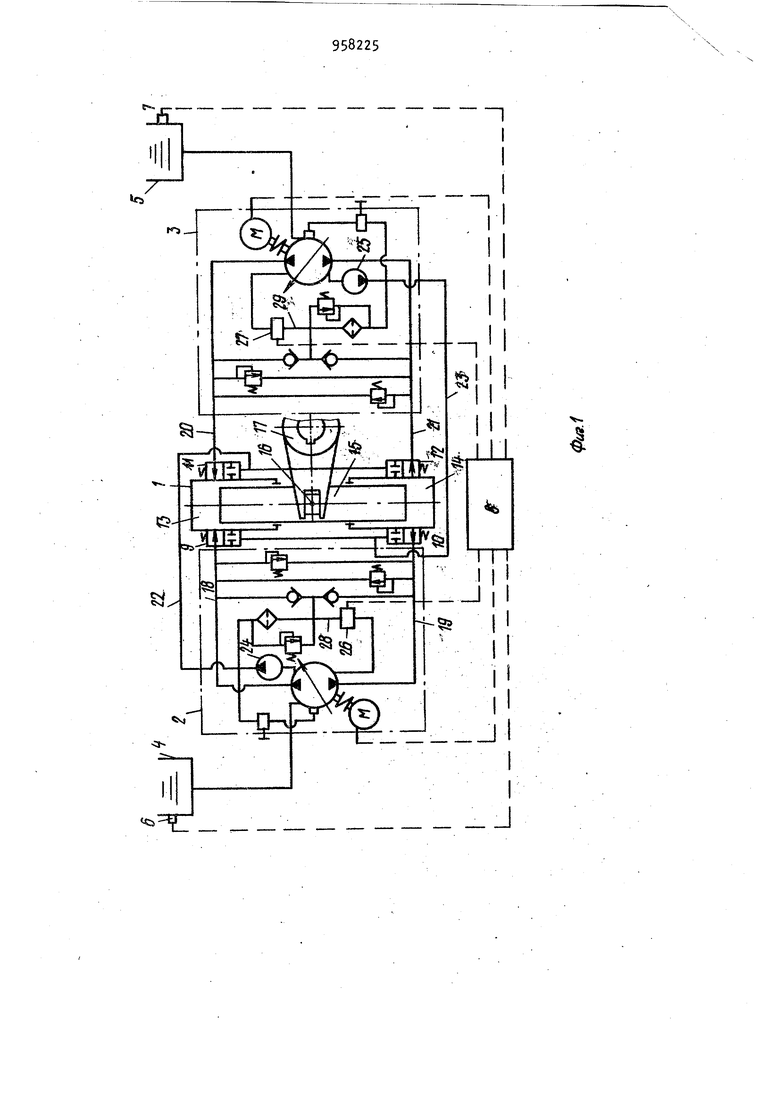
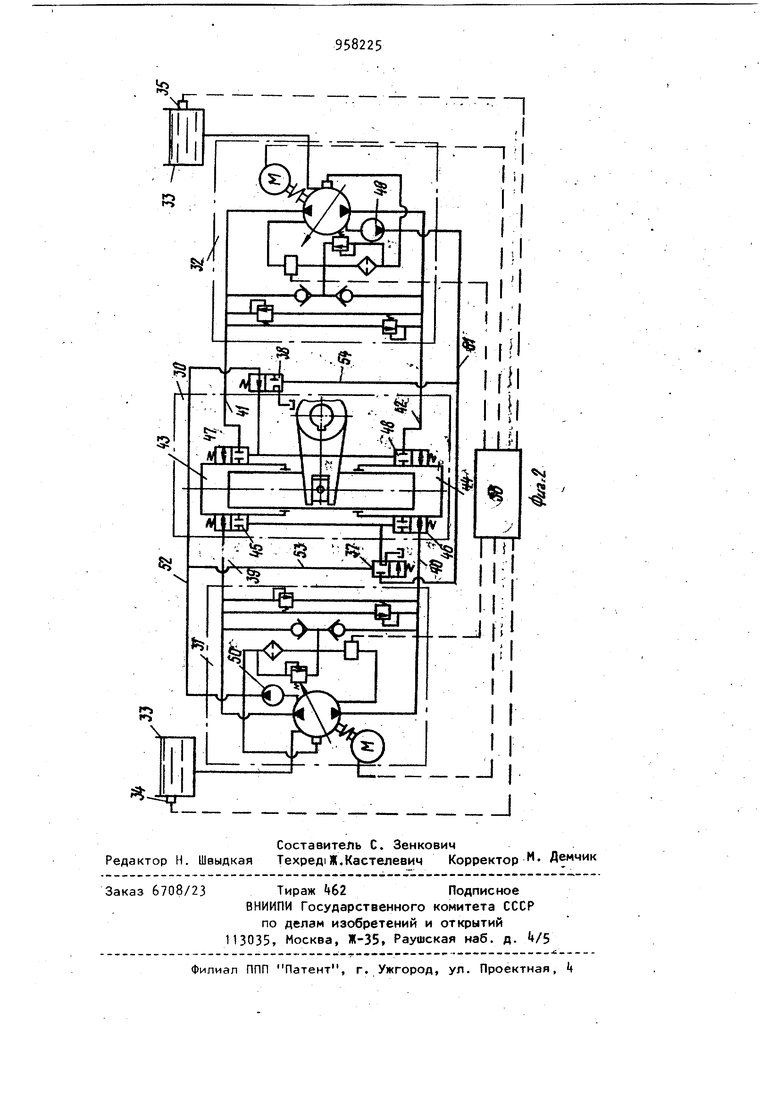
Изобретение относится к судостроению, в частности к гидравлическим приводам судовых рулей. Известен гидравлический привод су дового руля, содержащий двухцилиндро вый плунжерный силовой исполнительный механизм, кинематически связанный с баллером руля и гидравлически посредством напорно-сливных магистралей - с энергетическими насосными агрегатами, состоящими из основных и вспомогательных насосов управления и подпитки, которые гидравлически св заны с блоками ручного дистанционного или автоматического управления и с цистернами, в которых установлены реле уровня жидкости 1. Недостатком указанного гидравлического привода является недостаточная надежность работы при нарушении герметичности гидравлических магистралей . Цель изобретения - повышение надежности работы гидравлического привода судового руля. Указанная цель достигается тем, что насосные агрегаты гидравлически связаны с силовым исполнительным механизмом через запорно-проходные кла.паны с взаимным гидравлическим управлением от магистралей насосных агрегатов, при этом запорно-проходные клапаны установлены на цилиндрах силового исполнительного механизма. Кроме того, запорно-проходные клапаны выполнены с гидравлимеским управ лёнием от напорных магистралей вспомогательных насосов управления и подпитки .основных насосных агрегатов и от напорных магистралей насосных агрегатов. С целью обеспечения одновременной работы основных насосных агрегатов, на силовой исполнительный механизм и на напорные магистрали вспомогательных насосов управления и подпитки установлены двухпозиционные клапаны, например отсечные, с взаимным гидравлическим управлением от напорных магистралей последних. На фиг. 1 изображена принципиальная схема гидравлического привода судового руля; на фиг. 2 - то же, с двухпозиционными клапанами. Гидравлический привод руля(фиг. 1) содержит силовой исполнительный механизм 1, насосные агрегаты 2 и 3, цистерны и S с реле 6 и 7 уровня жидкости, блок 8 ручного дистанционного или автоматического управления, а также запорно-проходные клапаны 9-12 с гидравлическим управлением. Механизм 1 состоит из двухцилиндровых камер 13 и , плунжера 15, связанного шарниром 16 с румпелем 17 Насосные агрегаты 2 и 3 имеют собственные гидравлические контуры, свлзанные через гидравлические магистрали 18-21 с механизмом 1. . Торцовые камеры клапанов 9-12 соединены с напорными магистралями 22 и 23 вспомогательных насосов и 25 управлеуия и подпитки насосных агрегатов 2 и 3. Блок 8 ручного дистанционного или автоматического управления электрически связан с реле 6 и 7 уровня жид кости, установленными на цистернах и 5, с датчиками 26 и 27 давления (или расхода), помещенными на СЛИвных магистралях 28 и 29 насосов 2 и 25Гидравлический привод руля(фиг. 2 содержит силовой исполнительный ме)санизм 30, насосные агрегаты 31 и 32, цистерны с реле 33, З и 35 уровня жидкости, блок 36 ручного дистанционного и автоматического, управления, а также отсечные клапаны 37 и 38 с гидравлическим управлением. «Насосные агрегаты 31 и 32 связаны через гидравлические линии с камерами 3 и kk исполнительного меха низма. Торцовые камеры запорно-проходных клапанов. соединены с напорными магистралями вспомогательных насосов «9 и 50 управления и подпитки через клапаны 37 и 38, выполненные с гидравлическим управлением от насосов и 50 управления и подпитки по магистралям .51 5. Гидравлический привод руля(фиг. 1) работает следующим образом.) Силовой исполнительный механизм 1 находится в среднем положении (в 9 5 , 4 диаметральной плоскости судна), при этом насосные агрегаты выключены. При включении насосного агрегата например 2, управляющее давление, развиваемое насосом 2 по магистрали 22, воздействует на клапаны 11 и 12, запирает их, отключая силовой контур ёгрегата 3 от камер механизма 1. При заданий угла перекладки по часовой стрелке рабочая жидкость от агрегата 2 по магистрали 19 и клапану 10.поступает в камеру И механизма 1, вызывая перемещение плунжера 15- Поступательное движение плунжера 15 передается через шарнир 1б на румпель 17 Из камеры 13 жидкость вытесняетсяплунжером 15 и через клапан 9 и магистраль 18 поступает в агрегат 2. В случае повреждения любой магистрали блок 8 ручного дистанционного или автоматического управления, по ту;чая сигнал {в зависимости от величины разрыва) или с реле 6 уровня или с датчика 26 давления (расхода), выдает его на выключение агрегата 2 и включение агрегата 3. Клапаны 11 и 12 под действием пружины возвращаются в исходное положение, соединяя силовые магистрали агрегата 3 с камерами 13 и It механизма 1, а клапаны 9 и fO под действием управляющего давления от насоса 25 управления и подпитки агрегата 3 закрываются, отсекая механизм 1 от поврежденной части магистрали агрегата 2. Работа гидравлического привода с насосным агрегатом 3 осуществляется при аналогичном взаимодействии элементов. Гидравлический привод судового руля при совместйом включении насосных агрегатов работает следующим образом. Силовой исполнительный механизм 30 показан в среднем положении, при этом основной агрегат 31 включен и работает на холостом ходу. Управля.ющее давление, развиваемое насосом 50 по магистрали 52, воздействует на клапаны 47 и 8, запирает их, отключая силовые контуры агрегата 32 от камер механизма 30, и по магистрали 53 воздействует на клапан 37, смещая его в крайнее положение. При этом торцевые полости клапанов 45 и 46 соединяются со сливом, Во время включения агрегата 32 при работаю.щем агрегате 31 управляю 1дее давление от насоса по магистрали 54 поступает в торцевую камеру клапана 38, перемещая его в крайнее положение, при этом торцевые полости клапанов 7 и 6 соединяются со сливом, а сами клапаны 7 и А8 возвраща ются в исходное положение под действием пружин., соединяя силовые контуры агрегата 32 с камерами механизма 30. При переходе с двух работающих насосных агрегатов на один, наприг мер 32, падает давление в цепи насоса 50, при этом клапан 37. возвращаясь под действием пружины в исходное положение, сообщает торцевые полости клапанов и «б с магистралью насоса kS агрегата 32. Клапаны и 6, перемещаясь под действием давления отсекают силовые контуры неработающего насосного агрегата от камер механизма. Технико-экономический эффект от использования изобретения заключается в повышении надежности управления судном и безопасности плавания. Формула изобретения 1. Гидравлический привод судового руля, содержащий двухцилиндровый плунжерный силовой исполнительный механизм, кинематически связанный с .баллером руля и гидравлически посредством напорно-сливных магистралей с энергетическими насосными агрегатами, состоящими из основных и вспомогательных насосов управления и подпитки, которые гидравлически связаны с блоками ручного дистанционного и автоматического управления и с цистернами, в которых установлены реле 256 уровня жидкости, отличающийс я тем, что, с целью повышения надежности работы привода судового руля, насосные агрегаты гидравлически связаны с силовым исполнительным механизмом через запорно.-проходные клапаны с -взаимным гидравлическим управлением от магистралей насосных агрегатов, при этом запорно-про одныё клапаны установлены на цилиндрах силового исполнительногомеханизма. 2.Привод по п. 1, отличающийся тем, что запорно-проходные клапаны выполнены с гидравличесКИМ управлением от напорных магистралей вспомогательных насосов управления и подпитки основных насосных агрегатов. 3.Привод по п. 1, о т л и ч а ю щ и и с я тем, что запорно-проходные клапаны выполнены с. гидравлическим управлением 6т напорных магистралей насосных агрегатов. k. Привод по п.1, о т л и ч а щ и и с я тем, что, с целью обеспечения одновременной работы основных насосных агрегатов, на силовой исполнительный механизм и на напдрные магистрали вспокюгательных насосов управления и ;подпитки двухпозиционные клапаны, например отсечные, с взаимным гидравлическим управлением от напорных магистралей последних. . Источники информации, принятые во вг мание при экспертизе 1. Дубровский О.Н. и др. Гидвавлические приводы судовых механизмов. Л., Судостроение, 19б9., с. 157. рис- (прототип).
