Изобретение относится к области строительного и дорожного машиностроения/ в частности к дреноукладочным машинам, и может быть использовано для управления системаиии с переменной структурой.
Известен дреноукладчик, включающий присоединенный к тягачу и оснащенный датчиками глубины и угла наклона рабочий орган, жестко связанный с рамой трубоукладчика. В этсм дреноукладчике регулирование высотного положения рабочего органа происходит за счет изменения его положения относительно тягача,т.е. в режиме От базы fl.
Недостатком takoro дреноукладчика является большая величина ошибки перемещения задней кромки бункера.
Известен также дреноукладчик, . содержащий рабочий орган, гидроцилиндры изменения углового и высотного положения рабочего органа и устройство управления высотным положением рабочего органа, включающее датчики положения, связанные с соответствующим усилителем и электрогидравлическйм преобразователем. В указанном дреноукладчике возможно управление высотным положением рабочего
органа гидроцид1индром поворотных элементов в режиме работы От дна, т.е. когда рабочий орган перемещается относительно поворотной- опоры, расположенной в грунте, которая быть лыжей, днищем бункера, поворотными лопастями или т.п. t2j.
Управление высотным положением
10 рабочего органа в режиме управления От дна происходит более точно, чем в режиме ОТ базы, однако только при наличии достаточно твердых грунтов. В том случае, когда прочности
15 грунтов не хватает для перемещения рабочего органа, опора проседает вместе с рабоч.им органом, что приводит к появлению большой ошибки. Указанный недостаток является глав20ным препятствием к широкому применению режима работы От дна.
Известно устройство автоматического управления дреноукладчиком/ содержащим присоединенный шарнирно
25 через рычаг к тягачу рабочий орган с поворотной опорой, включающее датчик высоты, усилитель и логическое реле, управляемый вход которого сое-, динен с датчикрм высоты, а выходы
30 через электрогидравлицлские преобра;;зователи с исполнительными механизмами 33.
Однако известное устройство не позволяет получить данные о несущей способности Дна траншеи, которые необходимы для выбора наиболее опти- 5 мального режима управления. Переход с режима работы От дна на режим работы От базы и наоборот осуществляется оператором по его субъективной оценке. Несвоевременный переход 10 с одного режима на другой приводит к браку дрены. Переход с одного режима на другой помимо субъективности оценки момента перехода связан с отвлечением внимания механика-водителя от основных фyнkций управления дреноукладчиком..
Целью изобретения является повышение точности управления за счет выбора оптимального режима регулированин высоты рабочего органа и облегчения труда оператора.
Поставленная цель достигается тем, что устройство снабжено кинема- , тзгчески связанными с поворотной опорой датчиками ее среднего и нижнего 25 положений, выходы которых подключены к управлянлцим входам логического реле.
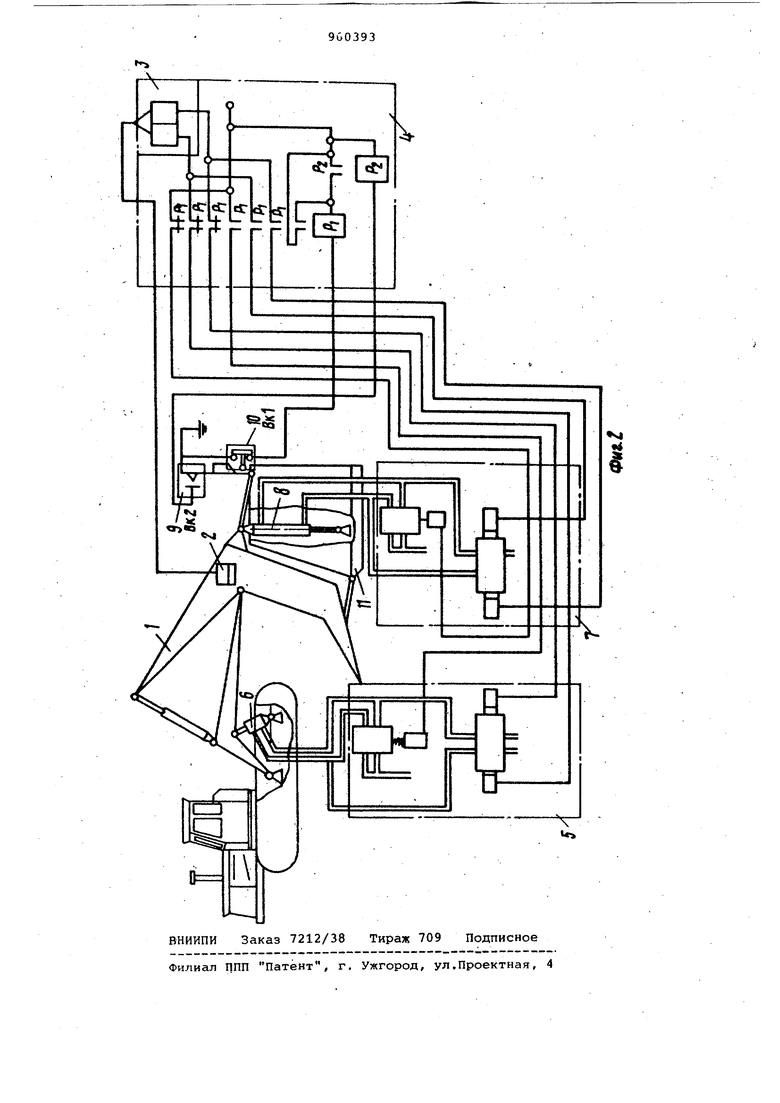
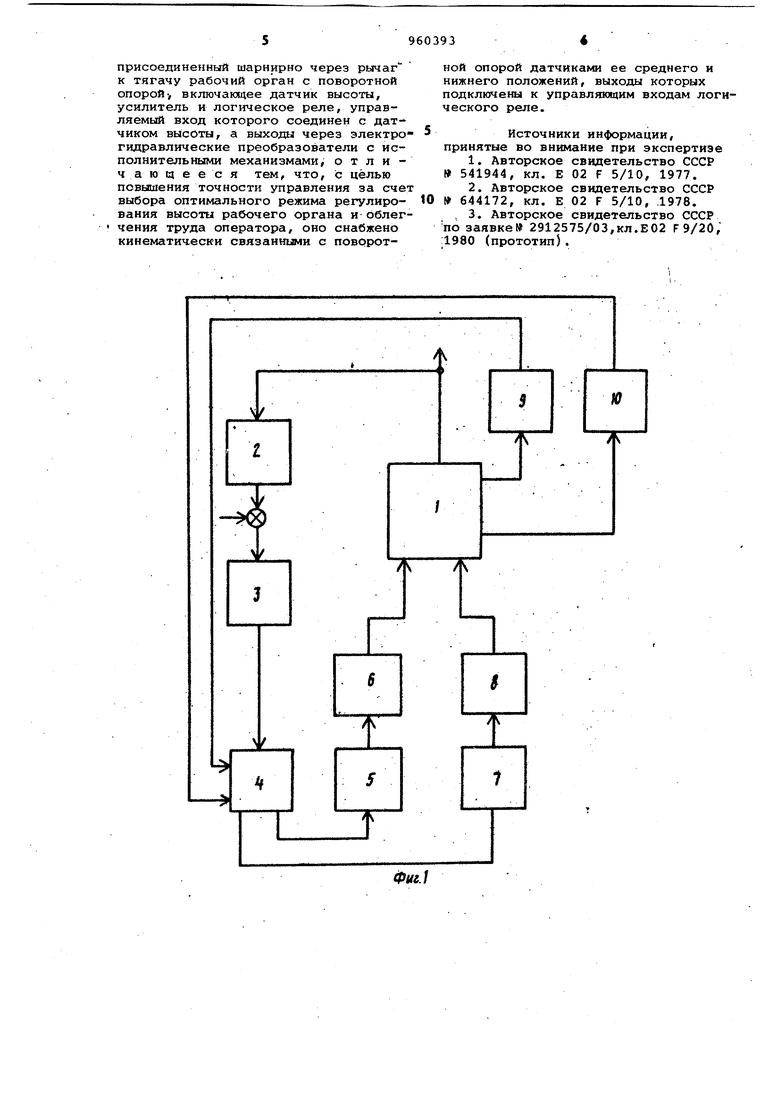
На фиг.1 представлена функциональнай схема дpeнoyклaдчикaf на фиг.2 пример исполнения автоматического пе-30 реключателя режимов на датчиках положений типа конечных выключателей и электромеханических реле.
Управляемый рабочий орган дреноукладчика связан с датчиком 2 высотногоЗЗ положения, который через усилитель 3 связан с коммутируемым входом реле 4. Один из выходов реле 4 связан через эле1 трогидравлический преобразователь 5 с гидроцилиндром 6 базы, а другой 40 выход этого реле через электрогидравлический преобразователь 7 связан с гидроцилиндром 8 поворотной опоры. Положение поворотной опоры фиксируется датчиками 9 среднего положения и , 10 нижнего положения, которые присоединены к управляющим входам реле, Реле 4 выполнено на двух электромеханических реле Р и Р. Реле Р управляется конечным выключателем ВК1, который является датчиком 10 50 нижнего положение опорной лыжи 11. Конечный выключатель ВК2, являющийся датчиком 9 среднего положения опорной лыжи 11, управляет электромеханическим реле Pjt, которое также 55 управляет реле Р. Размыкающиеся контакты реле Р с одной ст.ороны связань со входом электрогидравлического преобразователя 7, а замыкакяциеся со входом электрогидравлического пре-60 образователя 7, а с другой стороны контакты реле Р соединены с выходом усилителя 3, причем замыкающиеся контакты включены параллельно размыкающимся. Электрогидравлические пре- 5
образователи Б и 7 соединены соответственно с гидроцилиндрами 6базы и поворотной опоры 8.
Устройство следующим образом.
Перед заглублением рабочего органа лыжа 11 находится в крайнем верхнем положении, при этом датчик 9 среднего положения не выдает сигнгш, а датчик 10 нижнего положения постбянно выдает сигнал. Реле 4 под воздействием сигнала датчика 2 соединяет выход усилителя 3 с. гидроцилиндром б базы через электрогидравлический преобразователь.5, при этом гидроцилиндр 8 поворотной опоры находится в плавающем положении. В этом состоянии системы начинается работа. При заглублении рабочего органа до нужной глубины лыжа займет положение определяемое профилем дна траншеи. При этом включится датчик 9 положе|ния и реле 4 переключит выход усилителя 3 на вход электрогидравлического преобразователя 7, связанного с гидроцилиндром В, а гидродилиндр 6 базы переводится в этом случае в плавающее положение. Начинается работа в режиме Опоры на дно. В этом режиме работа происходит до тех пор, пока из-за просадки лыжи гидроцилинд поворотной опоры переместиться в сво предельное положение, определяемое датчиком 10 нижнего положения. При этом датчик срабатывает, включится реле 4 и вновь переключит выход усилителя 3 на управление гидроцилиндром б базы, т.е. на режим Опора на базу. В этом режиме произойдет перераспределение нагрузки, дeйcтвsпoщeй на рабочий opjfaH. Основная часть нагрузки воспринимается базой через гидроцилиндр 6 базы и поэтому лыжа всплывает, и ..в конце концов занимает среднее положение, при котором включается датчик 9 положения, и система снова работает в режиме Опоры на дно.
Таким образом, система осуществляет автоматическое переключение режима работы с Опорой на дно и на режим Опоры на базу. Этим повышается качество укладки дренажа, поскольку исключается существенная просадка опорной лыжи в слабых грунтах, искажающая профиль дна траншеи. С другой стороны, поскольку режим опоры на дно является предпочтительным с точки зрения точности, работа в этом режиме обеспечивается во всех случаях, когда это допускается несущей способностью грунта.
Формула изобретения
Устройство автоматического управления дреноукладчиком, содержащим
присоединенный шарнирно через рычаг к тягачу рабочий орган с поворотной опорой-, включающее датчик высоты, усилитель и логическое реле, управляемый вход которого соединен с датчиком высоты, а выходы через электрогидравлические преобразователи с исполнительными механизмами, отличающееся тем, что, с целью повышения точности управления за счет выбора оптимального режима регулирования высоты рабочего органа и облегчения труда оператора, оно снабжено кинематически связанными с поворотной опорой датчиками ее среднего и нижнего положений, выходы которых подключены к управляющим входам логического реле.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР 541944, кл. Е 02 F 5/10, 1977.
2.Авторское свидетельство СССР 644172, кл. Е 02 F 5/10, .1978.
,3. Авторское свидетельство СССР по заявке 2912575/03,кл.Е02 F9/20, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления бестраншейного дреноукладчика | 1980 |
|
SU907177A1 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Дреноукладчик | 1985 |
|
SU1377340A1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| Устройство автоматического управления бестраншейного дреноукладчика | 1982 |
|
SU1063949A2 |
| МАШИНА ДЛЯ РЫТЬЯ ТРАНШЕЙ | 1966 |
|
SU184732A1 |
| Рабочий орган бестраншейного дреноукладчика | 1982 |
|
SU1102865A1 |
| Рабочий орган бестраншейного дреноукладчика | 1977 |
|
SU734352A1 |