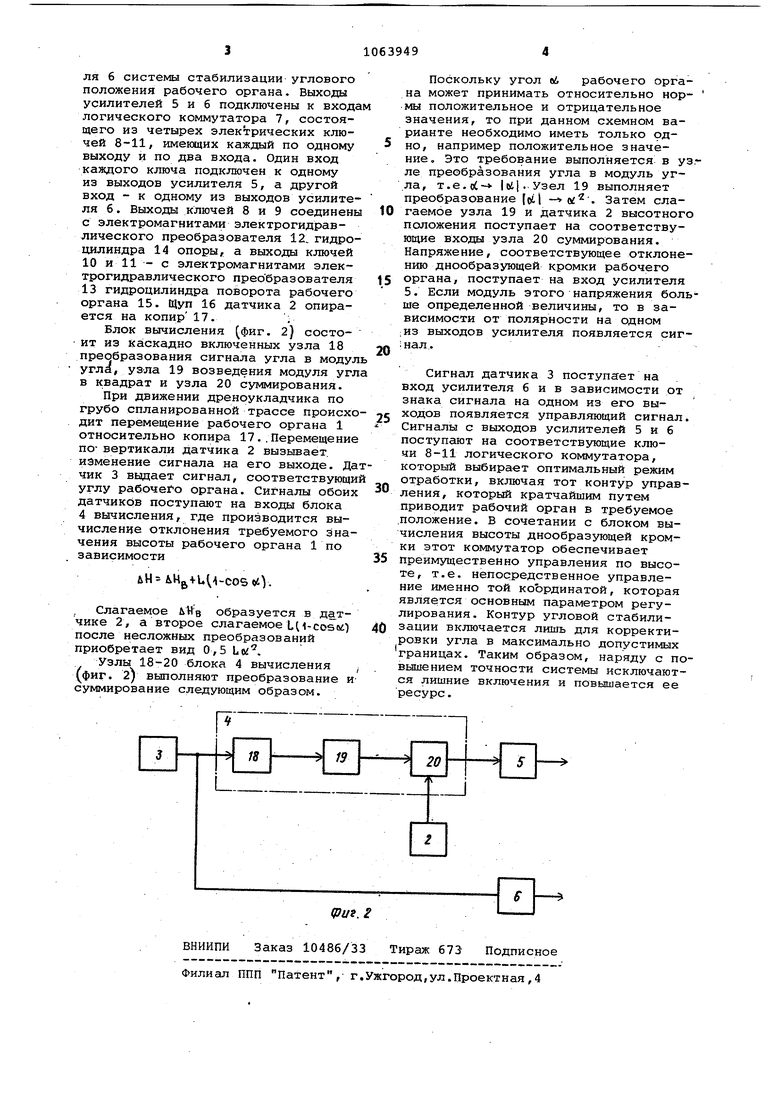
Изобретение относится к системам управления дорожно-строительнымИ и мелиоративными машинами, в частности дреноукладчиками. По основному авт.св. 907177 известно устройство автоматического управления бестраншейного дреноукладчика, состоящее из двух систем стабилизации высотного и углового положений рабочего органа, каждая ;из которых включает датчик, усили|тель, электрогидравлический преобра зователь и исполнительный гидроцилиндр, снабженное логическим коммутатором, выполненным начетырех электрических ключах, каждый из которых имеет два управляемых входа и один выход, причем один вход связан с выходом усилителя йистемы стабилизации углового положения рабочего органа, другой вход - с выходом усилителя системы стабилизации высотного положения рабочего органа, а выход каждого ключа - с соответствующим электрогидравлическим преобразователем. Такой логический элемент в двухконту{)ной системе управления обеспечивает преиму щественнук) работу именно той системы, которая приводит к компенсации возмущений кратчайшим путем, т.е. облегчает стабилизацию обеих координат ij . Однако известное устройство не исклю ает лишних отработок. Например, в результате однЬвремен го отклонения рабочего органа по угл и по высоте его днообразующая кромка находится на требуемой высоте, тогда как на датчиках высоты и уг.ла появляются сигналы, требующие отработки. Это приводит к тому, что даже при наличии логического коммутатора система в ходе отработки на. некоторое время смещает днообразующую кромку из нормального положения т.е. не только не улучшает, а, наоборот, ухудшает качество укладки дренажа. Цель изобретения - побышение точ ности укладки дренажных труб за счет управления непосредственно по высотному отклонению рабочего органа независимо от того, за счет изменения какой координаты рабочего органа это отклонение произошло, кроме того ,увеличение ресурса работы элементов устройства за счет ликвидации шинных отработок и уменьшения числа срабатываний систем стабилизации рабочего органа. Поставленная цель достигается тем, что устройство автоматического управления бестраншейногб дреноукладчика снабжено блоком вычисления высотного положения рабочего органа соединенным соответственно первьм входом с выходом датчика- системы стабилизации высотного положения рабочего органа, вторым входом - с выходом датчика системы стабилизации углового положения рабсзчего органа, а выходом - с входом усилителя системы стабилизации высотного положения рабочего органа. Блок вычисления высотного отклонения днообразующей кромки реализует связь между отклонениями высотного и углового датчиков и вертикальным смещением днообразующей кромки рабочего органа , гдеьНц- отклонение, измеренное датчиком высотного положения;Hц- отклонение днообразующей кромки по высоте, вызванное поворотом рабочего органа на угол об , измеренный датчиком углового положения. Блок вычисления высотного положения рабочего органа выполнен в виде электрического устройства, реализующего зависимость iH u,(A-cosoi), где .L - расстояние между датчиком высотного положения и днообразующей кромкой. Эта величина является для данной машины константой.: На вход блока вычисления поступают два переменных сигнала с датчиков и еб , а на его выход - один сигнал в контур управления высотой рабочего органа, выражающий в чистом виде отклонение днообразующей режущей кромки по высоте от требуемого профиля дна. На фиг. 1 изображена общая схема устройства автоматического управления бестраншейного дреноукладчика-, на фиг. 2 схема блока вычисления высотного положения рабочего органа. Устройство управления рабочим органом землеройной меииины на примере дреноукладчика (фиг. 1) состоит из рабочего органа 1, на котором установлены датчик 2 системы стабилизации высотного положения рабочего органа и датчик 3 системы стабилизации углового положения этог|о органа. Выходы обоих датчиков подключены к входс1м блока 4 вычисления высотного положения рабочего органа 1. Выход блока 4 вычисления подключен к входу усилителя 5 системы стабилизации высотного положения рабочего органа, а датчик 3.- к входу усилите
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления бестраншейного дреноукладчика | 1980 |
|
SU907177A1 |
| Устройство для слежения за высотным положением рабочего органа землеройной машины | 1984 |
|
SU1209782A1 |
| Устройство автоматического управления дреноукладчиком | 1980 |
|
SU960393A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Устройство контроля системы автоматического управления землеройной машиной | 1983 |
|
SU1157182A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Устройство управления рабочим органом дреноукладчика | 1983 |
|
SU1151647A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Лазерная система автоматического управления и контроля глубины укладки дрен | 2020 |
|
RU2742807C1 |
УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСТРАНШЕЙНОГО ДРЕНОУКЛАДЧИКА по авт.св. 907177, отличающееся тем, что, с целью повышения точности укладки дренажных труб и увеличения ресурса работы элементов устройства, оно снабжено блоком вычисления высотного положения рабочего органа, соединенным соответственно первым входом с выходом датчика системы стабилизации высотного положения рабочего органа, вторым входом - с выходом датчика системы стабилизации углового положения рабочего органа, а выходом - с входом усилителя системы стабилизации высотного положения рабочего органа. (Л с со ;о 4 со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
