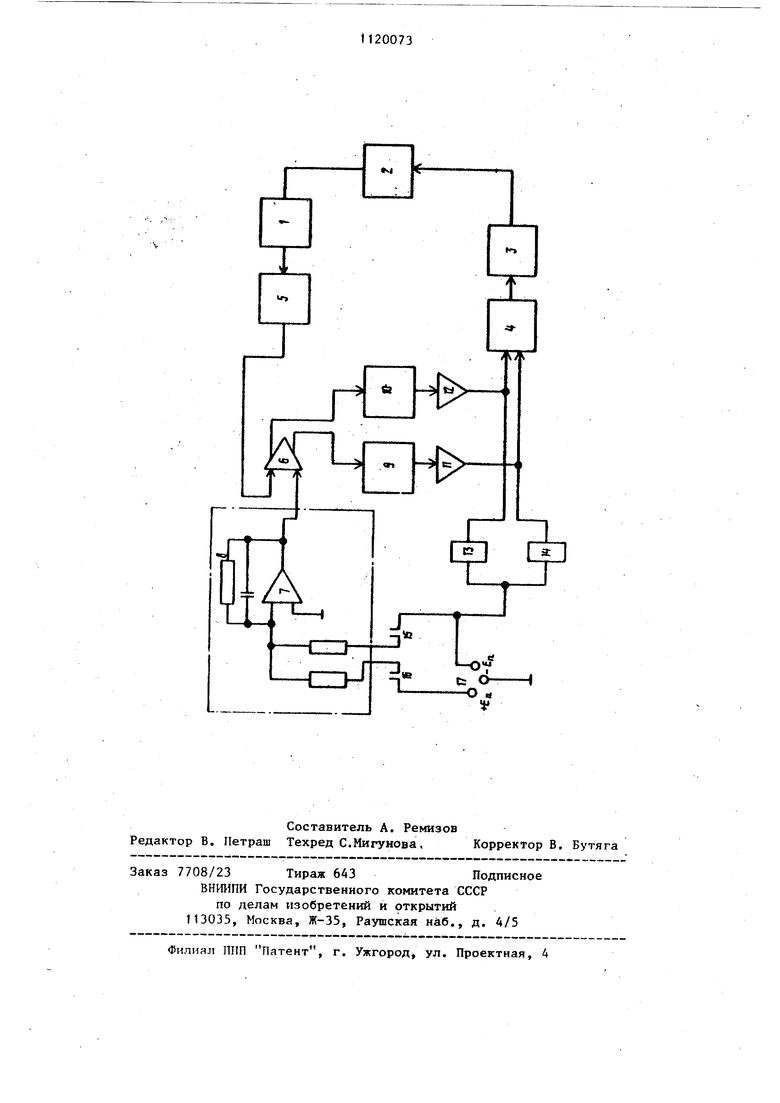
оэ Ивобретение относится к строитель .ноиу и дорожкоигу машиностроению, в частности X бестраншейным дреноукЛадчикам с ножевым рабочим органом пассивного типа, на котором шарннрно закреплены средства управления его высотным положением, например в виде поворотных лопастей, обеспечивакщих опору ножа на грунт и ляемых с помощью гидроцилиндров. Известна копирная система автоматического управления высотшш положением рабочего органа землеройной машины, используемая, например, на экскаваторе-дреноукладчике ЗТЦ-202 и включающая датчик высотного положения, копир (например, в виде натур ного троса или оптического луча), усилитель и исполнительный гидроцилиндр с электрогидрозолотником Cl. Использование таких средств для управления рабочими органами пассивного типа с поворотными лопастями делает процесс управления неустойчиВЬВ4, вследствие чего траектория рабо чего органа приобретает волнообразны характер с весьма значительными вертикальными размахами относительно среднего положения рабочего органа. Известен автоматический регулятор землеройной машины, содержащий датчи высотного положения рабочего органа, подключенньй к одному входу дифферен циального усилителя, исполнительный механизм, связанный с гидроцилиндром управления, к которому подключен алектрогидравлический золотник {.2. Недостатком известного регулятора является нестабильность постоянно времени гидравлического катаракта, вызванная значительной зависимостью этой постоянной от температуры окружающей среды и наличия утечек, что снижает точность регулирования и надежность работы .устройства. Кроме того, применение гидравлического катаракта делает устройство в целом достаточно габаритным, что не отвечает современным требованиям к конструкции регулятора. Цель изобретения - повьшение точности регулирования,надежности и уменьшения габаритов регулятора. Поставленная цель достигается тем чТо автоматический регулятор землеройной машины, содержащий датчик высотного положения рабочего органа, подключенный к одному входу дифферен циального усилителя, исполнительный 3 механизм, связанный с гидродилиндром угфавления, к которому подключен электрогидравлический золотник, снабжен электронным интегратором, двумя пороговыми устройствами, двумя усилителями и двумя реле, выход электронного интегратора подключен к другому входу дифференциально го усилителя, выкоды которого через пороговые устройства подключены к входам усилителей, выход каждого усилителя подключен к соответствующей обмотке элект- рогидравлического золотника н обмотке реле, а входы электронного интегратора через замыкающие контакты реле подключены к разным полюсам двухполярного источника питания. На чертеже изображена схема автоматического регулятора. На схеме обозначены рабочий орган 1 ножевого типа, исполнительный механизм 2, гидроцилиндр 3 управления, электрогидравлический золотник 4, датчик 5 высотного положения рабочего органа, дифференциальный усилитель 6, электронный интегратор 7, активное сопротивление 8 в цепи обратной связи интегратора, пороговые устройства 9 и 10, усилители 11 и 12, обмотки реле 13 и 14, замыкающие контакты 15 и 16, двухполярньй источник 17 питания. Рабочий орган 1 землеройной машины перемещается исполнительным механизмом 2. Положение исполнительного механизма определяется перемещением гидроцилиндра 3 управления, связанного по входу с злектрогидравлическим золотником 4, а по выходу с исполнительным механизмом 2. Рабочий орган 1 землеройной машины жестко связан с датчиком 5 положения, который измеряет положение рабочего органа относительно копирной линии. Выход датчика 5 положения соединен с одним из входов дифференциального усилителя 6 на другой вход которого подается сигнал с выхода интегратора 7. Интегратор 7 имеет в цепи обратной связи сопротивление 8, необходимое для создания изодромного закона изменения сигнала на выходе интегратора. Выходы дифференциального усилителя 6 связаны с пороговыми устройства ш 9 и 10, а выходы пороговых устройств связаны с входами соответствукицих усилителей 11 и 12. Выходы усилителей 11 и 12 соединены соответ3ственно с электромагнитными реле 14 и 13 и параллельно с входом (электрическим) электрогидравлического золотника А. Каждое реле управляет сво им контактом; соответственно 13-е 15-м, а lA-e - 16-м. Эти контакты нормально разомкнуты, и одна группа каждого из контактов соединена через активное сопротивление с входом интегратора 7, а другая одного из контактов соединена с +, а другого с - источника питания. Датчик 5 высотного положения явля ется измерительным средством, выходной сигнал которого пропорционален изменению высотной координаты управляемого объекта (в частности, рабоче го органа мелиоративной машины). В среднем положении датчик выдает сигнал О (ноль).При отклонении измеряемого устройства вверх или вни на выходе датчика 5 появляется пропорциональное напряжение соответственно положительное или отрицательное. Следовательно, на выходе дифференциального усилителя 6 появляется сигнал на одном или другом выходе что и определяет включение пороговог устройства 9 или 10. Перемещение раГючего органа в про дольно-вертикальной плоскости склады вается из перемещения, вызванного во мущением и поворотом лопастей на некоторый угол, осуществляемым гидроцилиндром. В том случае, когда лопас ти повернуты на некоторый угол, а гидроцилиндр выключен, рабочий орган будет все равно перемещаться в верти кальном направлении ,до тех пор, пока не наступит динамическое равновесие сил, действующих на рабочий орган. Устройство работает следующим образрм. При равновесном положении регулятора датчик 5 положения также находи ся в равновесном положении, исполнительный механизм 2 - в среднем положении, рабочий орган 1 - в исходном положении на заданной высотной отмет ке. При этом с выхода датчика 5 и с выхода интегратора 7 сигналы не поступают. На выходах дифференциального усилителя 6 сигналы отсутствуют, электрогидравлический золотник 7 в нейтральном положении, обмотки реле 734 обесточены, гидроцилиндр 3 не перемещается, на вход интегратора не поступает напряжение. При отклонении рабочего органа 1, а вместе с ним и датчика 5 от равновесного положения на выходе датчика 5 возникает сигнал, который, пройдя через дифференц ильный усилитель, включает пороговое устройство 9 (10) и с его выхода через усилитель 11 (12) электрогидравлический золотник 4 и реле 13 (1А). При этом начинается перемещение исполнительного гидроцилиндра и исполнительного механизма, что приводит к перемещению рабочего органа в сторону положения равновесия. Кроме этого за,мыкаются контакты 15 (16) и на вход интегратора подается положительное (отрицательное) напряжение, а на его выходе появляется линейно нарастающее напряжение. Последнее растет до тех пор, пока сигналы на обоих входах дифференциального усилителя 6 не станут равны. При равенств сигналов с выхода датчика положения и с выхода интегратора пороговые устройства, электрогидравлический золотник и гидроцилиндр выключаются. При этом происходит перемещение рабочего органа в сторону, равновесного положения и разряд конденсатора в цепи обратной связи интегратора через активное сопротивление . Если постоянные времени прихода в равновесное положение рабочего органа и интегратора равны, то во время переходного процесса сигнала на выходе не будет и система будет выключена до момента достижения равновесного положения. Этоприводит к уменьшению колебательности переходного процесса, что снижает динамическую ошибку системы по сравнению с тем вариантом, когда она работает без предлагаемого устройства. Изобретение повышает точность работы регулятора, поскольку не связано с зависимостью гидравлических элементов от температуры окружающей среды и не боится неизбежных утечек жидкости. С этим же связана более высокая надежность, меньшие габариты и стоимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Устройство контроля системы автоматического управления землеройной машиной | 1983 |
|
SU1157182A1 |
| Устройство для автоматической стабилизации положения рабочего органа дорожно-строительных машин | 1979 |
|
SU883280A1 |
| Устройство управления рабочим органом землеройной машины | 1983 |
|
SU1122792A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Устройство управления рабочим органом землеройной машины | 1979 |
|
SU901415A1 |
| Система автоматического управления землеройной машины | 1987 |
|
SU1509489A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| Устройство автоматического управления дреноукладчиком | 1980 |
|
SU960393A1 |
АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ЗЕМЛЕРОЙНОЙ МАШИНЫ, содержащий датчик высотного положения рабочего органа, подключенный к одному входу дифференциального усилителя, исполнительный механизм, связанный с гидроцилиндром управления, к которому подключен электрогидравлический золотник, отличающийся тем, что, с целью повышения точности регулирования,- надежности и уменьшения габаритов, он снабжен электронным интегратором, двумя пороговыми устройствами, двумя усилителями, двумя реле, выход электронного интегратора подключен к другому входу дифференциального усилителя, выходы которого через пороговые устройства подключены к входам усилителей,, выход каждого усилителя подклю ен к сЬответствующей обмотке электрогидравлического золотника и обмотке реле, а входы электронного интегратора через замыкающие контакты реле подключены к разным полюсам двухпрлярного источника питания.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЭКСКАВАТОР-ДРЕНОУКЛАДЧИК | 0 |
|
SU319251A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , 2 | |||
| Устройство для управления положением рабочего органа землеройных машин | 1976 |
|
SU726277A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
