Известны многоковшовые траншейные экскаваторы с плаваюш,ей подвеской рабочего органа и элсктрогидравлической системой для автоматического регулирования глубины конания, в которых датчик глубины взаимодействует с натянутым вдоль траншеи копирным тросом.
В предложенном экскаваторе к нижней части ковшовой рамы его рабочего органа шарнирно закреплена лыжа, неремеш,аемая по дну траншеи. На этой лыже смонтирован исполнительный цилиндр электрогидравлической системы так, что нри подаче в ту или иную его полость рабочей жидкости, соответственно командам датчика глубины, происходит подъем или опускание рабочего органа экскаватора. Это обеспечивает заданное положение рабочего органа независимо от положения экскаватора при движении его по неровной местности.
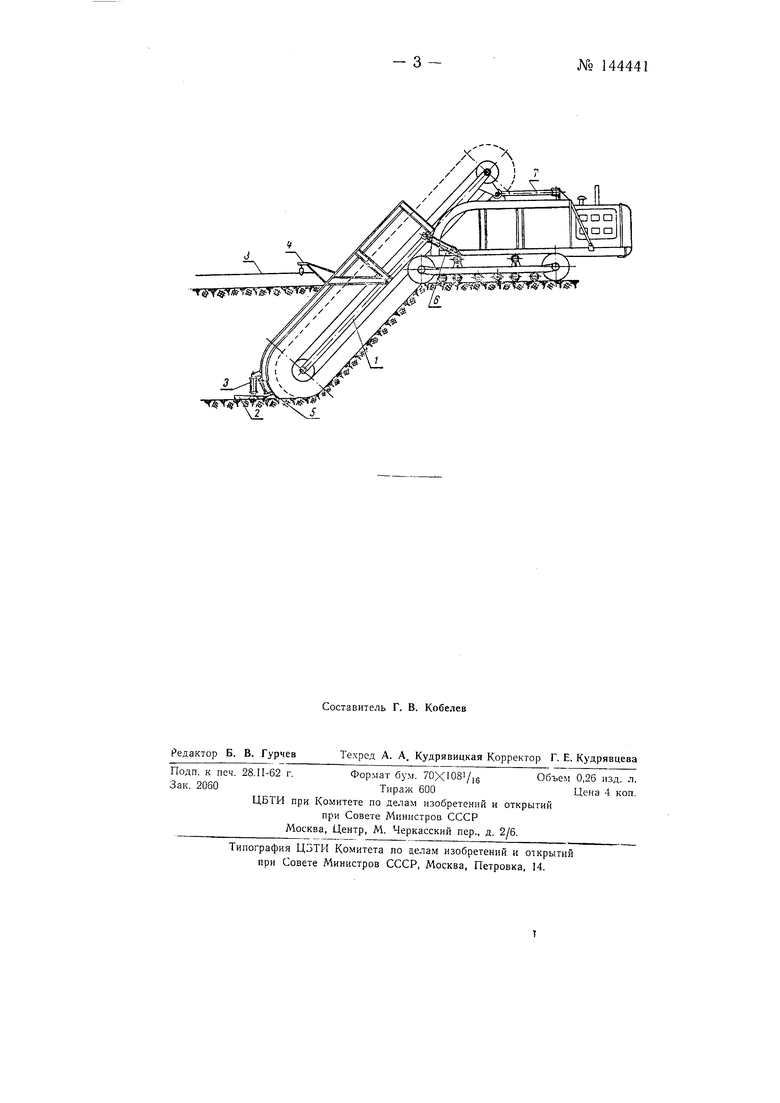
На чертеже изображена схема такого экскаватора.
Подвеска рабочего органа многоковшового траншейного экскаватора плаваюш.ая. Верхний конец рамы / рабочего органа шарнирно закрепляется на раме экскаватора над его центром тяжести, а нижний конец опирается на дно отрываемой траншеи опорной лыжей 2 через регулируюгций гидроцилиндр 3. Гидроцилиндр получает команды от датчика 4 глубины копания и, опираясь через опорную лыжу на дно траншеи, поднимает или заглубляет режущую кромку 5 рабочего органа. Регулирование глубины копания производится, таким образом, от подготовленного дна траншеи.
Боковые гидроцилиндры 6, обеспечивающие перевод рабочего органа из транспортного положения в рабочее и обратно, переключаются в плавающее положение переводом рычага. В процессе работы эти гидроцилиндры не связывают рабочий орган с рамой экскаватора и с его ходовой частью. Поэтому при переходе экскаватора через препятствия режущая кромка рабочего органа не испытывает никаких принудительных усилий и не меняет своего положения по глубине копания.
ЛЬ 144441-- 2 Изменение по высоте верхней опоры 7 рамы рабочего органа не вызывает заметного высотного изменения режущей кромки, так как расстояние от опорной лыжи до режущей кромки рабочего органа незначительно. Следовательно, система управления рабочим органом от дна отрываемой траншеи с привязкой режущей кромки 5 к копирному тросу 8 работает в более спокойных условиях при движении экскаватора по неровной местности, чем любая другая система управления от рамы экскаватора с привязкой к тому же копирному тросу. Кроме того, при плавающей систе.ме подвески рабочий орган не копирует микрорельефа местности.
Такой способ подвески рабочего органа дает возможность получать хорощее качество дна транщеи с обеспечением требуемой точности уклона и выпрессовки в естественном грунте желобка для укладки гончарных трубок, так как давление на формирующий ползунок опорной лыжи от собственного веса рабочего органа вполне достаточно.
При опоре рабочего органа на дно отрываемой транщеи гасятся толчки рабочего органа от периодического зарезания ковшей и резко снижается число случайных включений системы регулирования.
В заключении Научно-исследовательского института строительства дорожных машин подлверждается, что использование дна траншеи в качестве базы для автоматического регулирования глубины копания является оригинальным и позволяет получать меньшие отклонения от заданной глубины, так как значительно уменьщается влияние изменения положения базы экскаватора. Плавающее положение рамы рабочего органа и дополнительное опирание ее на дно траншеи через регулирующий цилиндр и опорную лыжу создают благоприятные условия для работы экскаватора и выполнения точной глубины копания.
Предмет изобретения
Многоковшовый траншейный экскаватор с плавающей подвеской рабочего органа и электрогидравлической системой для автоматического регулирования глубины копания, датчик глубины которого взаимодействует с натянутым вдоль траншей копирным тросом, отличающийся тем, что, с целью обеспечения заданного положения рабочего органа независимо от положения экскаватора при его движении по неровной местности, к нижней части ковшовой рамы его рабочего органа шарнирно закреплена перемещаемая по дну транщеи лыжа, на которой смонтирован исполнительный цилиндр электрогидравлической системы таким образом, что при подаче в ту или иную его полость рабочей жидкости, соответственно командам датчика глубины, происходит подъем или опускание рабочего органа экскаватора.
ZZ
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКОВШОВЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1967 |
|
SU204255A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ КОПАНИЯ К МНОГОКОВШОВОМУ ЭКСКАВАТОРУ | 1965 |
|
SU168192A1 |
| Дреноукладчик | 1977 |
|
SU702127A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ЗАДАННОГО УКЛОНА ДНА ТРАНШЕИ | 1967 |
|
SU192078A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ДРЕНАЖНЫХ ТРУБ В ТРАНШЕЮ, МОНТИРУЕМОЕ НА РАМЕ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1966 |
|
SU224380A1 |
| Машина для бесстраншейной прокладки преимущественного горизонтального закрытого дренажа | 1973 |
|
SU531906A1 |
| ДАТЧИК ГЛУБИНЫ КОПАНИЯ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1970 |
|
SU269800A1 |
| Роторный экскаватор | 1974 |
|
SU610922A1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| Датчик глубины копания | 1974 |
|
SU560031A1 |