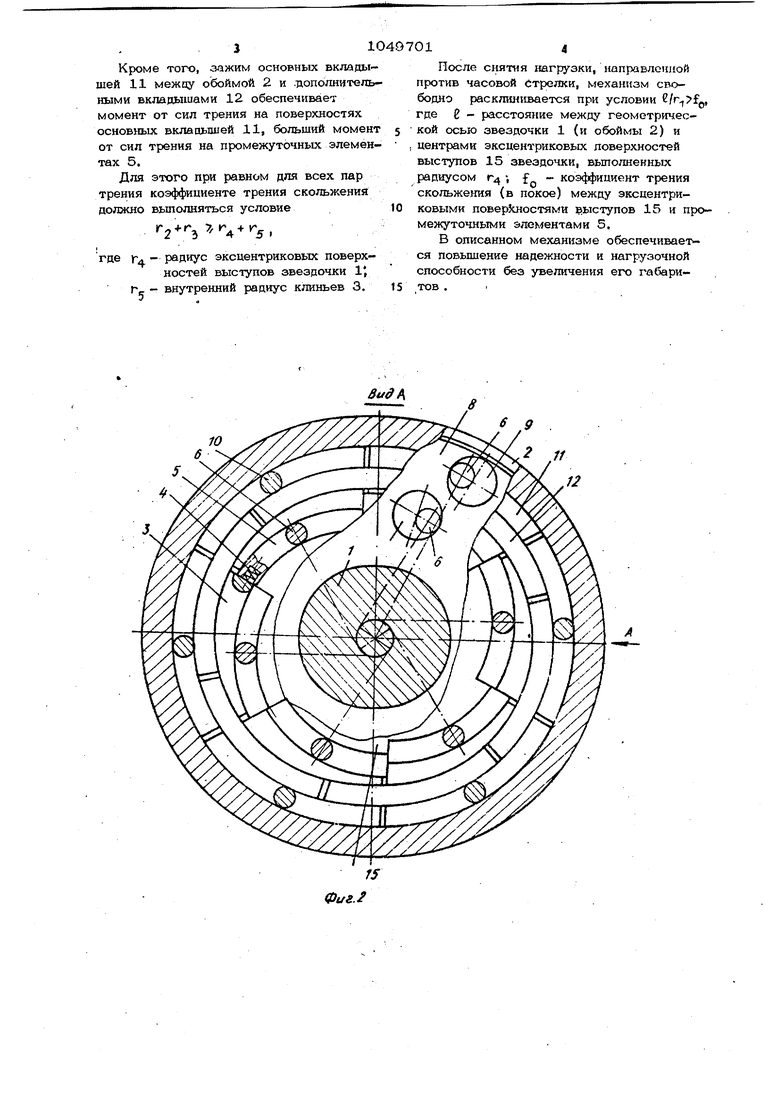
Изобретение относится к машинострое нию и может быть использовано в импуль libix decc-J-yneHHaTbix передачах, трансмиссиях самоходных машин, в металлорежущих станках и других устройствах. Известен кл1шо1зой механизм свободного хода, содержащий обойму, эксцентрик, расположенный на нем, промежуточное и дополнительное колыш, кинематически связанные с обоймой, эксдентриковую втулку, размещенную меж.ду дополнитeльны и промежуточным кольцами, и подпружиненный клин L 1 J. Такой механизм не обеспечивает четкого заклинивания контактирующих элементов, что снижает его надежность., Известен клиновой механизм свободного хода, содержащий осюйму, звездочку . с эксцентриковыми поверхностями, распо ложенные на них промежуточные элементы и подпружиненные клинья Г 2 J . Однако данный механизм также имеет недостаточную надежность, так как при заклинивании и раскпинивании происходит пробуксовка. Целью изобретения является повышени надежности путем гарантированного заклинивания и расклинивания контактирующих элементов. Поставленная цель достигается тем, что клиновой механизм свободного хода, содержащий обойму, звездочку с эксцентриковыми поверхностями, расположенные между обоймой и эксцентриковыми поверх ностями промежуточные элементы и подпружиненные клинья, снабжен основными и дополнительными вкладышами и щайбой, основные вкладыщи и промежуточные элементы кинематически связаны с шайбой, допойнитель}а.1е вкладьши - с обоймой, а промежуточные элементы выполнены в виде колодок. На фиг. 1 показан механизм с местны ми вырывами, общий вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1. Механизм содержит вал со звездочкой 1, обойму 2, клинья 3, подпружиненные пружинами 4. Между клиньями 3 и выступами звездочки 1 вала установлены промежуточные элементы в виде колодок 5, имеющие по одной цилиндрической оси 6 на боковом торце. На оси 6 свобод но надеты эксцентриковые втулки 7, кото рые, в свою сг1ередь, свободно вставлены в отверстия щайбы 8. В шайбу 8 также ъставлены эксцентриковые втулки 9, нацотые на оси 10 основных вкладышей 11 которые контактируют с обоймой 2 и дополнительными вкладышами 12. Последние посредством собственных осей 13 и эксцентриковых втулок 14 связаны с обоймой 2. Звездочки 1 имеют эксцентриковые контакты поверхности, образующие выступы 15. В статическом положении механизма за счет ycwmiu пружин 4 обеспечивается контакт между обоймой 2, основными вкладышами 11, дополнительными вкладышами 12, клиньями 3, колодками 5 и эксцентриковыми контактными поверхностями звездочки 1. Перечисленные элементы сжимаются между собой силой Р, возникающей от усилия пружины 4. Кинематическую связь элементов посредством эксцентриковых втулок 7, 9 и 14 и осей 6, Ю и 13 можно выполнить иначе, например, надев на оси 6, 10 и 13 плоские подауны, вставленные в радиальные пазы шайбы 8 и обоймы 2, Механизм работает следующим образом. При повороте вала со звездочкой 1 по часовой стрелке (фиг. 3) радиальные торцы выступов 15 звездочки, упираясь в торцы промелсуточных элементов 5, проворачивают их за собой. Последние, упираясь через пружи ЕЫ 4 в клинья 3, проворачивают за собой и клинья 3 . Поворачивается и связанная кинематичес ки с промежуточными элементами 5 шайба 8 и совместно с ней основные вкладыши 11. Неподвижными вместе с обой мой 2 остаются дополнительные вкладыши 12. При повороте звездочка 1, таким образом, будет преодолевать момент от сил трения zpf (), М. где f - коэффициент трения скольжения, принятый здесь равным для. всех пар трения; Г. - внутренний радиус дополнительных вкладышей 12; Г- - внутренний радиус основных вкладьшей 11; h-j - внутренний радиус обоймы 2. При повороте звездочки 1 против часоеой стрелки (фиг, 3) п{юисходит четкое, практически мгновенное заклинивание без взаимного пробуксовывания элементов механизма. Это обеспечивается тем, что кинематически связанные элементы Механизма сближаюася в направлении, перпендикулярном эксцентриситету, т.е. вдоль радиусов (фиг. 3). Кроме того, эажим основных вкладышей 11 межцу обоймой 2 и .допопнитель ными вкладышами 12 обеспечивает момент от сил трения на поверхностях основных вкладышей 11, больший момент от сил трения на промежуточных элементах 5. Для этого при равном для всех пар трения коэффициенте трения скольжения должно вьшолняться условие 7, Гл - радиус эксцентриковых поверхностей выступов звездочки IJ г - внутренний радиус клиньев 3. После снятия нагрузки, направлошюй против часовой стрелки, механизм свободно расклинивается при условии , где 2 - расстояние между геометрической осью звездочки 1 (и обоймы 2) и центрами эксцентриковых поверхностей выступов 15 звездочки, вьшолненных радиусом г 1 f - коэффициент трения скольже}гая (в покое) между эксцентриковыми повер5шостями выступов 15 и промежуточными элементами 5. В описанном механизме обеспечивается повьш1ение надежности и нагрузочной способности без увеличения его габаритов .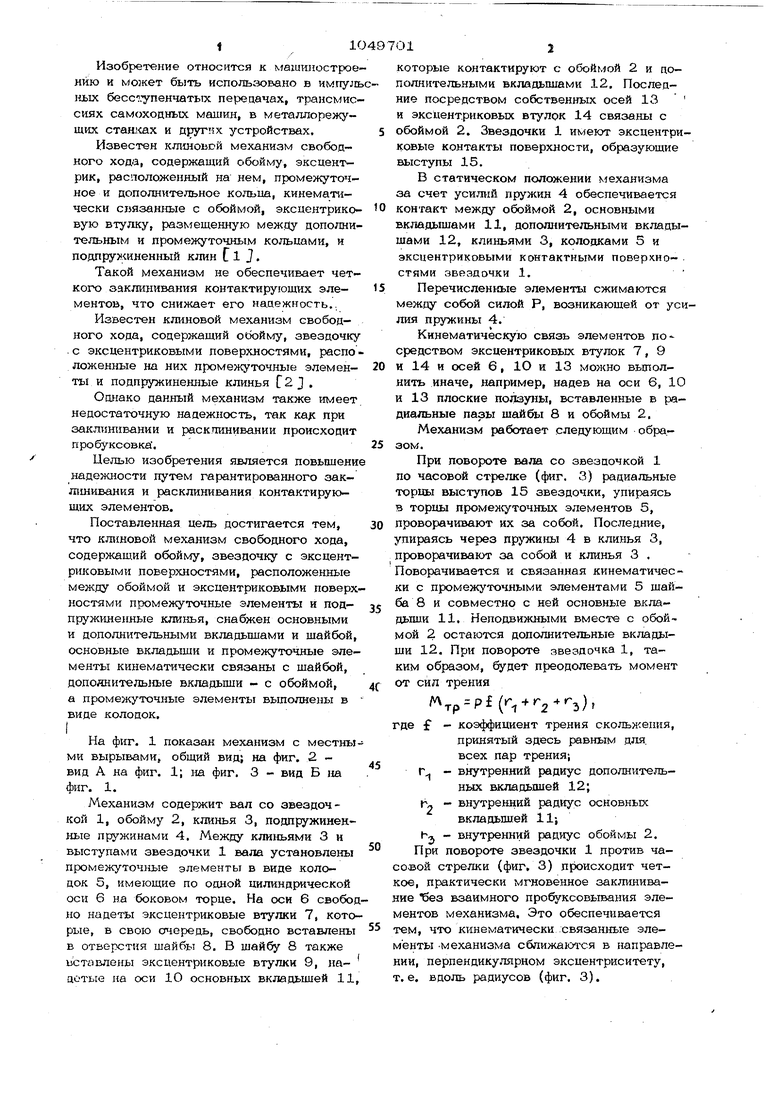
| название | год | авторы | номер документа |
|---|---|---|---|
| Коробка передач | 1983 |
|
SU1191656A1 |
| Клиновой механизм свободного хода | 1980 |
|
SU962690A1 |
| Клиновой механизм свободного хода | 1980 |
|
SU1087714A1 |
| Клиновой механизм свободного хода | 1986 |
|
SU1399541A1 |
| Клиновая муфта свободного хода | 1986 |
|
SU1402734A1 |
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
| Муфта свободного хода | 1987 |
|
SU1474353A1 |
| Клиновая муфта свободного хода | 1976 |
|
SU657194A1 |
| Клиновой механизм свободного хода | 1985 |
|
SU1267082A1 |
| Муфта свободного хода | 1984 |
|
SU1275159A1 |

КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГС) ХОДА, содержащий обойму, звездочку с эксцентриковыми поверхностями, расположенные ме{жду обо&мой и эксцентриковыми поверхностями промежуточные элементыи подпружиненные клинья, отличающий с я тем, что, с целью повышения надежности путем гарантированного закшшивання и расклинивания контактирующих элементов, он снабжен основными и дополнитедьнымн вклаш 1шами и шайбой, основные вкладыши и промежуточные элементы кинематически связаны с шайбой, дополнительные вкладьши - с обоймой, a промежутбчные элементы вьшолнены в виде колодок. 4аь ф 
10
Фиг.
11
12
Bitd6
Фиг 3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке N 3217613/25-27, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ № 9154О2, кл | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
