(54) РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2033988C1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕКАМЕРОЙ | 2001 |
|
RU2200971C2 |
| Устройство для регулирования технологического процесса | 1985 |
|
SU1305641A1 |
| Позиционная система регулирования | 1976 |
|
SU637790A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Следящая система | 1980 |
|
SU941925A1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
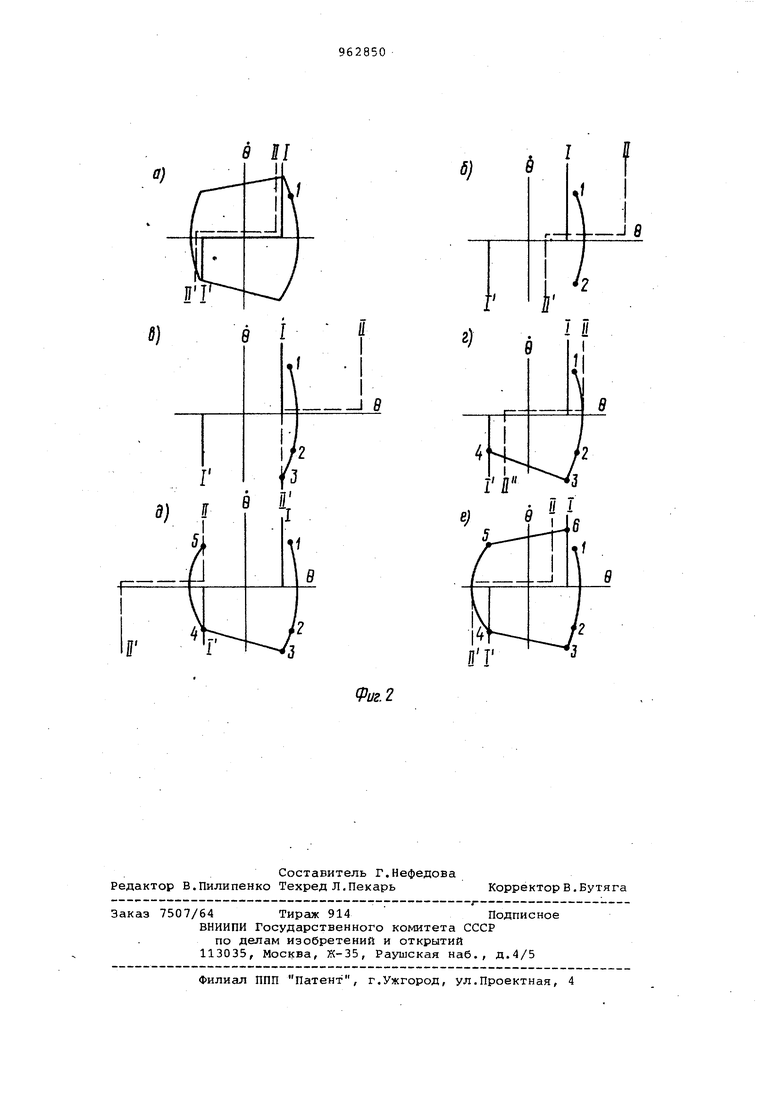
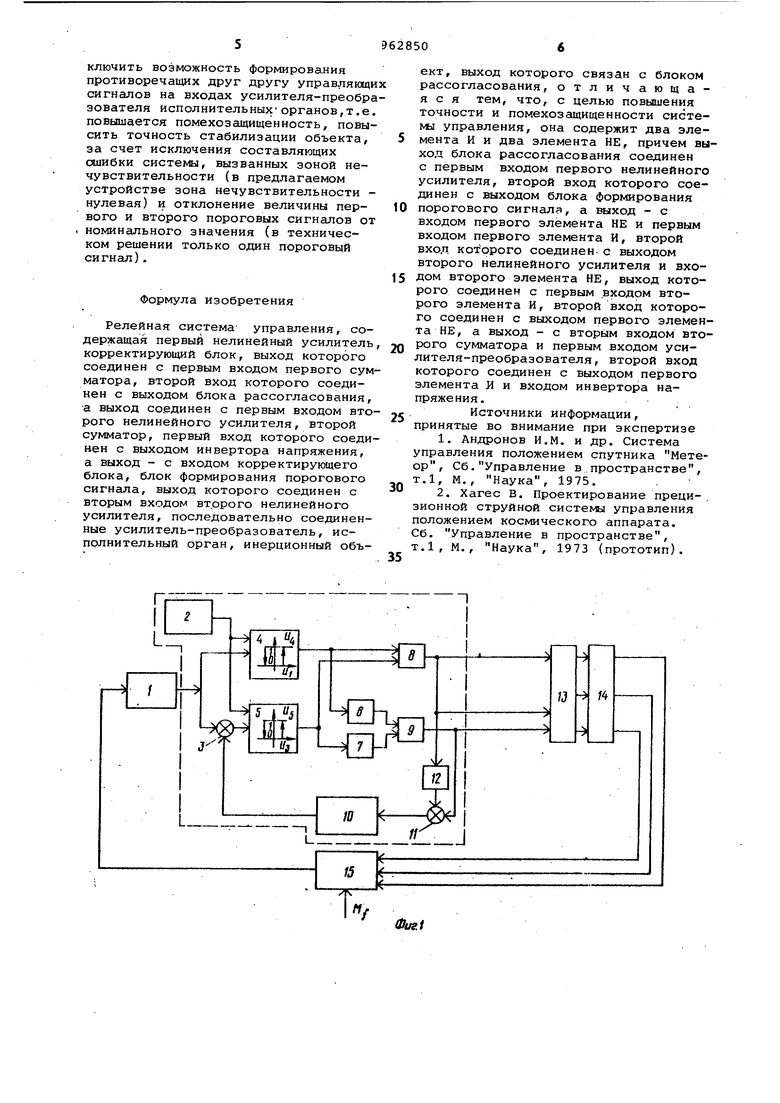
Изобретение относится к автоматическому регулированию и может найти применение в системах управления ста билизацией углового движения инерционных объектов. Известные устройства содержат тре позиционный релейный элемент с гаран тированной зоной нечувствительности С13. Однако точность систем угловой стабилизации с такими регуляторами недостаточно высока. Наиболее близким к предлагаемому является релейный регулятор, содержа щий первый нелинейный усилитель, кор ректирующий блок, выход которого сое динен с первым входом первого сумматора, второй вход которого соединен с выходом блока рассогласования, а выход соединен с первым входом второ го нелинейного усилителя, второй сум матор, первый вход которого соединен с выходом инвертора напряжения, а выход - с входом корректирукядего бло ка, блок формирования порогового сиг нала, выход которого соединен с вторым входом второго нелинейного усилителя, последовательно соединенные усилитель-преобразователь, исполнительный орган, инерционный объект. выход которого связан с блоком рассогласования, в состав релейного регулятора также входит второй блок формирования порогового сигнала С23. При нгшичии помех в известном устройстве возможна потеря управляемости вследствие нарушения соотношений уровней пороговых сигналов, а -также невысокая точность работы системы, обусловленная необходимостью введения га;рантированной зоны нечувствительности. Цель изобретения - повышение точности и помехозащищенности систег/ы управления. Поставленная цель достигается введением двух элементов И и двух элементов НЕ, причем выход блока рассогласования соединен с первым входом первого нелинейного усилителя, второй вход которого соединен с выходом блока формирования порогового сигнала, а выход с входом первого элемента НЕ и первым входом первого элемента И, второй вход которого соединен с выходом второго нелинейного усилителя и входом второго элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с выходом пер- вого элемента НЕ, а выход - с вторым входом второго сумматора и первым вх дом усилителя-преобразователя, второ вход которого соединен с выходом пер вого элемента И и входом инвертора , напряжения. На фиг.Г представлена структурная схема системы угловой стабиливации инерционного объекта, на фиг. 2 а-е показана последовательность формиро, вания предельного цикла автоколебаНИИ объекта при реализации системы. Схема включает в себя блок рассог ласования 1, блок 2 формирования порогового сигнала, первый сумматор 3, первый и второй нелинейные усилители 4 и 5, первый и второй элемент НЕ б и 7, первый и второй элемент И 8 и 9, корректирующий блок 10, второй сумматор 11, инвертор 12 напряжения, усилитель-преобразователь 13, исполнительный орган-14, инерционный объект 15. Система работает следующим образом. Уровень порогового сигнала, формируемого блоком 2, отображается на фазовой плоскости (в координатах угол , угловая скорость) линиями переключения I -1 для первого нелинейного усилителя и 11-11 для второго нелинейного усилителя. Так как на входы первого 4 и второго 5 нелинейных усилителей поступает один и тот же пороговый, сигнал с выхода бло ка 2 ,то линии включения I и II (праве которых формируются сигналы U4 1 и ) и линии I и 11 (левее которых формируются сигналы и и 0) при нулевом значении корректирующего сигнала на выходе блока 10 совпа дают : 1 с I I и I с I I . Разность между угловыми положениями объекта, соответствующими этим линиям., равна величине гистерезиса J ::;0j-9j 0|--0-. Формирование увеличивающегося (уменьшающегося) корректирующего сигнала с блока 10 и его сум мирование с позиционным сигналом дат чика отображается на фазовой плоскости движением линий 11-11 влево (вправо) вдоль оси абсцисс О, пусть в начальный момент угол и угловая скорость объекта отображается ни фазовой плоскости точкой 1 (фиг.2а). Так к.ак сигнал угла U и скорректированный сигнал Uj больше порогового сигнала U, то формируются 1)4. 115 1 и на выходах элементов И 8 и 9 Us . Следовательно, фор мируется управляющий момент, выэывакяций отрицательное угловое ускорение объекта, изображающая точка двигается по параболической траектории 1-2(фиг.2 а,б,в). Одновременно на выходе сумматора 11 формируется )-l и на выходе корректирующего блока, выполненного, например, апериодического звена - уменьшающийся сигнал, что эквивалентно смещению линий 11-11 вправо в виде относительно линий I -1. В точке 3 (фиг.2в) скорректированный сигнал Uj становится меньше порогового, т.е. , но позиционный сигнал по-прежнему больше порогового элемента (линия 1-1 все время неподвижна) .поэтому на выходе И 8 сигнал , на выходах элементов НЕ 6 и 7 ь If тогда на выходе элемента И 9 Ug 0 и управляющее воздействие изменяется на малое или нулевого уровня и изображающая точка двигается Tio траектории 3-4 (фиг.2г). Одновременно на выходе, сумматора 11 и 0 и амплитуда корректирующего {сигнала на выходе блока 10 начинает уменьшаться (подобно разряду .конденсатора) , что эквивалентно смещению линий 11-11 влево к исходному положению, совпадающему с положением линий 1-1. В точке 4 (фиг.2г) позиционный сигнал становится меньше порогового и сигнал . Так как и 1) 0, то элементом И 8 формируется , а схемой И 9 - (поскольку на выходах элементов НЕ 6 и 7 сигналы U,). По сигналу Ug l к объекту прикладывается управляющий момент, вызывающий его положительное ускорение, изображающая точка двигается по траектории 4-5 (фиг.2д). На выходе сумматора 11 при этом сигнал и и 1 и блоком 10 коррекции формируется увеличивающийся сигнал, т.е. линии I I-I I перемещаются влево относительно линий 1-1. В точке 5 (фиг.2д) скорректированный сигнал Uj вновь становится больше порогового и формируется сигнал . Так как позиционный сигнал по-прежнему меньше порогового, то 1), следовательно, 0. Управляющий момент изменяется на малый или нулевого уровня, изображающая точка перемещается по траектории 5-6 (фиг.2е), сигнал U, 0 и амплитуда корректирующего сигнала начинает уменьшаться, что эквивалентно движению линии 11-11 вправо к линиям J- I. В точкеоб позиционный сигнал становится больше порогового и формируется и 1, при этом на выходе релейного усилителя 5 сигнал 1). Тогда на выходах элементов И 8 и 9 сигналы и . Формируется управляющий момент, вызывающий отрицательное угловое ускорение объекта, изображающая точка перемещается по траектории .6-1-2-3 (фиг,2е,а,б,в) формируется уменьшающийся корректирующий сигнал и линии 11-11 двигаются вправо от линий I - I . Далее цикл управления, повторяется в вышеописанной последовательности. Такое построение системы угловой стабилизации позволяет исключить возможность формирова.ния противоречащих друг другу управляющи сигналов на входах усилителя-преобра зователя исполнительныхорганов,т.е. повышается помехозащищенность, повысить точность стабилизации объекта, за счет исключения составляющих ошибки системы, вызванных зоной нечувствительности (в предлагаемом устройстве зона нечувствительности нулевая) и отклонение величины первого и второго пороговых сигналов от номинального значения (в техническом решении только один пороговый сигнал). Формула изобретения Релейная система управления, содержащая первый нелинейный усилитель корректирующий блок, выход которого соединен с первым входом первого сум матора, второй вход которого соединен с выходом блока рассогласования, а выход соединен с первым входом вто рого нелинейного усилителя, второй сумматор, первый вход которого соеди нен с выходом инвертора напряжения, а выход - с входом корректирующего блока, блок формирования порогового сигнала, выход которого соединен с вторым входом второго нелинейного усилителя, последовательно соединенные усилитель-преобразователь, исполнительный орган, инерционный объТ«,
0uei ект, выход которого связан с блоком рассогласования, отличающаяся тем, что, с целью повышения точности и помехозащищенности системы управления, она содержит два элемента И и два элемента НЕ, причем выход блока рассогласования соединен с первым входом первого нелинейного усилителя, второй вход которого соединен с выходом блока формирования порогового сигналя, а нлход - с входом первого элемента НЕ и первым входом первого элемента И, второй вход котЪрого соединен-с выходом второго нелинейного усилителя и входом второго элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с выходом первого элемента НЕ, а выход - с вторым входом второго сумматора и первым входом усилителя-преобразователя, второй вход которого соединен с выходом первого элемента И и входом инвертора напряжения. Источники информации, принятые во внимание при экспертизе 1.Андронов И.М. и др. Система управления положением спутника Метеор, Сб.Управление в.пространстве, Т.1, М., Наука, 1975. 2.Хагес В. Проектирование преци-. зионной струйной системы управления положением космического аппарата. Сб. Управление в пространстве, т.1,М., Наука, 1973 (прототип).
б)
.-4-J6
01и)
е
