Изобретение относится к автоматике и вычислительной технике, а именно к системам оценки текущего состояния, выявления и сигнализации возникновения аномальных и аварийных ситуаций в сложных технических системах, например в технологических процессах обогащения руд, и может быть использовано для выявления, сигнализации и прогнозирования аварийных ситуаций и аварий на -объектах обогатительной, химической и теплоэнергетической и других отраслей промышленности, где возникновение аварийных ситуаций и развитие их в аварию сопровождается значительными потерями.
Известно устройство для выявления аварийных ситуаций, содержащее блок контроля, выход которого соединен с входом экстрадолятора, регистратор, блок памяти, блок выделения аварийного параметра, блок распознавания аварийного состояния, коммутатор и блок управления, причем к выходам экстраполятора подсоединены информационные входы блока памяти, выхо.аы которого соединены с соответствующим входами коммутатора, выходы которого подсоединены через блок
распознавания аварийного состояния к первому входу регистратора и входам блока вьаделения аварийного параметра, первый выход которого подсоединен к регистратору, а второй - к первому управляющему входу блока памяти, второй управляющий вход которого соединен с первым выходом блока управления, второй выход которого
10 подключен к управляющему входу коммутатора f Ij .
Недостатками устройства являются низкие быстродействие и надежность выявления аварийных ситуаций, обусловленные его реализацией и неучетом динамики изменения контролируемых параметров, отсутствие возможности прогнозирования момента наступления аварийной ситуации, а вследствие
20 этого ограниченные область применения и возможность эффективного использования для ряда специфических производств, например в обогатительной , химической , металлургической отраслях промышленности.
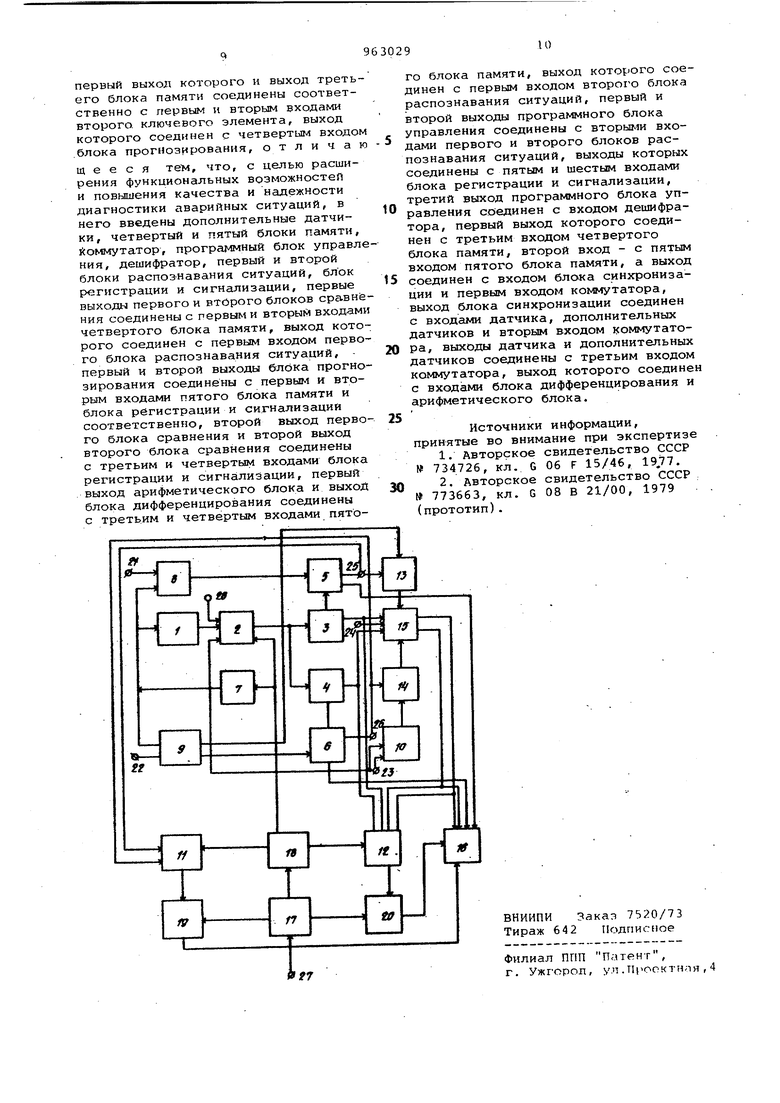
Наиболее близким по технической сущности к предлагаемому является устройство для выявления аварийных ситуаций, содержащее датчик контролируемого параметра, три блока памяти, блок синхронизации, два блока сравнения, два ключевых элемента, блок измерения скорости изменения параметра и блок прогнозирования 2 Однако данное устройство не може быть использовано для выявления и о щестБления дифференциальной диагнос тики аварийных ситуаций в сложных технический системах, характеризующихся множеством контролируемых параметров со сложными причино-след ственными связями, большими транспортными запаздываниями, наличием неконтролируемых возмущений. Цель изобретения - расширение функциональных возможностей устрой Ьтва, т.е. обеспечение возможностей распознавания ситуаций, в том числе и аварийных, и по вышение качества и надежности диагностики аварийный ситуаций, аварий и отказов в сложных технических системах. Поставленная цель достигается тем, что в устройство для выявления аварийных ситуаций, содержащее датчик, блок синхронизации, соединенны с первым блоком памяти, выход которого соединен с одним входом первого блока сравнения, первый выход.ко торого соединен с одним входом ключевого элемента, блок дифференцирования, арифметический блок, второй третий блоки памяти, второй блок сравнения, второй элемент и блок прогнозирова.ния, первый и второй выходы блока дифференцирования соединены с другим входом- перво го блока сравнения и первым входом блока прогнозирования, выход блока синхронизации соединен с входами второго и третьего блоков памяти, первый и второй выходы второго блока памяти соединены соответствен но с первым входом второго блока сравнения и вторьм входом первого ключевого элемента, выход которого соединен с вторым входом блока прог нозирования, первый выход арифметического ,блока соединен с третьим входом блока прогнозирования, а вто рой выход арифметического блока сое динен с вторым входом второго блока сравнения, первый выход которого и выход третьего блока памяти соединены соответственно с первым и вторым входами второго ключевого элемента, выход которого соединен с четвертым входом блока прогнозирования, введены дополнительные датчи ки, четвертый и пятый блоки памяти, коммутатор, программный блок управ ления, дешифратор, первый и второй блоки распознавания ситуаций, блок регистрации и сигнализации, первые входы первого и второго блоков сравнения соединены с первым и втор входами четвертого блока патляТи, выход которого соединен с первым входом первого блока распознавания ситуаций, первый и второй выходы блока прогнозирования соединены с первым и вторым входами пятрго блока памяти и блока регистрации и сигнализации, соответственно второй выход первого блока сравнения и второй выход второго блока сравнения соединены с третьим и четвертым входами блока регистрации и сигнализации, первый выход арифметического блока и выход блока дифференцирования соединены с третьим и четвертым входами пятого блока памя-ти, выход которого соединён с первым входом второго блока распознавания ситуаций, первый и второй выходы программного блока управления соединены с вторыми входами первого и второго блоков распознавания ситуаций, выходы которыхсоединены с пятым и шестым входами блока регистрации и сигнализации-, третий выход программного блока управления соединен с входом дешифратора, первый выход которого соединен с третьим входом четвертого блока памяти, второй вход с пятым входом пятого блока памяти, а выход соединен с входом блока синхронизации и первым входом коммутатора, выход блока синз ронизаЧьии соединен с входом датчика, дополнительных датчиков и вторым входом коммутатора, выходы датчика и дополнительных датчиков соединены с третьим входом коммутатора,выход которого соединен с входагли блока дифференцирования и арифметического блока. На чертеже приведена блок-схема устройства .Устройство содержит датчик 1 контролируемых параметров, коммутатор 2, блок 3 дифференцирования, арифметический блок 4, блоки 5 и б сравнения, блок 7 синхронизации, блоки 8-12 памяти, ключевые элементы 13 и 14, блок 15 прогнозирования, блок 16 регистрации и сигнализации, блок 17 управления, дешифратор 18, первый и второй блоки 19 и 20 распознавания ситуаций. В блок 8 памяти по входу 21 вводятся максимально допусти1 ще значения скорости изменения контрсхпируемых параметров. В блок 9 памяти по входу 22 вводятся от системы управления заданные значения контролируемых параметров. В блок памяти 10 по входу 23 вводится максимально и минимально допустимые значения контролируемых параметров. Величины, вводимые по входам 21, 22 и 23, не являются постоянными и зависят от технического и технологического состояний сложного диагностируемого объекта, каким является, например, замкнутый цикл измельчения - классификация руды на обогатительных фабриках, для которого, например, заданное значение заполнения мельницы исходной рудой и песками классификатора и допустимые значения (максимальное и минимальное заполнения и скорости его изменения, зависят от принятых условий измельчений и классификации, от типа руды и состояния футеровочной брони мельницы и ее шаровой загрузки.
Арифметический блок 4 служит для фильтрации помех и опеределения текущего взвешенного среднего значения сигнала от соответствующего датчика 1 контролируемого параметра.
Блок 15 служит для прогнозирования момента значительного превышения или уменьшения значения контролируемого параметра над заданным значением параметра и момента возникновения аварийной ситуации (превышение или уменьшение значения контролируемого параметра над верхним и нижним допустимыми значениями соответственно) . По входу 24 на блок 15 поступает сигнал коррекции прогноза от оператора (в ручном режиме) или от блока оценки качества прогнозирования, входящего в состав системы управления (в автоматическом режиме).
Блок 11 памяти служит для записи в выбранной кодовой комбинации, определяемой программой контроля,признаков параметров,определяющих состояние объекта контроля.Сигнал логической единицы поступает с выходов 25 и 26 тогда, когда есть управляющий сигнал с блоков 5 и 6 сравнения на ключевые элементы 13 и 14, а сигнал логического нуля в-обратном случае. Таким образом, в блоке 11 памяти формируется кодовая комбинация нулей и единиц, которая после окончания выбранной программы контроля или ее части подается на первый блок 19 распознавания, где производится сравнение выбранной и сформированной логических ком.бинаций признаков параметров и определяется причина возникновения аварийной ситуации.
Блок 12 памяти служит для записи контролируемых параметров и последующего последовательного их ввода в блок 20 распознавания технологических ситуаций, где путем построения и анализа логико-предикатных уравнений,составляющих модель технологической ситуации, определяется принадлежность текущей технологической ситуации к одной из множества подмножеств нормальньпс, аномальных и аварийных ситуацийТ
Устройство работает следующим образом.
По сигналу от системы управления или от оператора по входу 27 запускается блок- 17, который через блок .18 подготавливает к работе блок 7.
Блок 7 по программе, выбранной в блоке 17, подает сигнал на коммутатор: 2, который подключает один из датчиков, соответствующий выбранной последовательности контроля параметров, а также подает сигналы на блоки 8, 9 и 10 памяти, где вы.бираются ячейки памяти, хранящие
0 соответствующую информацию о контролируемом параметре. Сигнал с выбранного датчика поступает на вход блока 3 дифференцирования и на вход арифметического блока 4. С выхода
5 блока 4 сигнал поступает на вход блока 15 прогнозирования и на вход блока 6 сравнения, на второй вход которого поступает сигнал заданного значения параметра от блока 9 памяти. Если величина разности этих
0 сигналов превысит допустимый уровень, то ключевой элемент 14 открывается и разрешает прохождение сигнала с блока 10 памяти.
Одновременно в блоке 3 реализу5ется операция дифференцирования входного сигнала, тем самым определяется скорость изменения контролируемого параметра. В блоке 15 по величине сигнала от блоков 3, 4
0 и 10 производится прогнозирование времени выхода параметра из области допустимых режимов, т.е. момента возникновения аварийной ситуации.
Одновременно с этим сигнал скорос5ти изменения контрюлируемого параметра от блока 3 и сигнал допустимой величины этой скорости от блока 8 памяти поступает в блок 5 сравнения. В случае превышения текущего значе0ния скорости изменения параметра над заданным значением скорости блок 5 открывает выходным сигналом ключевой элемент 13, пропуская на блок 15 прогнозирования сигнал заданного значе5ния контролируемого параметра от блока 9 памяти. В блоке 15 по величинам сигналов от блоков 3, 4 и 9 производится прогнозирование момента выхода параметра за область заданных значений, т.е. момента возни1 новения
0 аномальных ситуаций.
Одновременно сигналы с блоков 5 и 6 поступают в блок 11 памяти, а с блоков 3, 4 и 15 - в блок 12
5 памяти.
В случае прекращения программы контроля, вызванной или аварийным значением параметра, или окончанием выбранной программы, сигнал от
О блока 17 через блок 18 поступает на блоки 11 и 12, которые соединены :с первьм 19 и вторым 20 блоками распознавания.
В блоке 20 происходит обработка
5 ,N-мерного вектора состояния (где
N - количество контролируемых параметров) с целью определения, принадлежности данного вектора к одной из
областей ситуаций - области нормальных, аномальных или аварийных ситуаций. Распознавание текущей ситуации и выявление аварийных осуществляется с помощью алгоритмов автоматической классификации (распознавания) образов, например основанных на методах R-функций стохастической аппроксимации путем построения k-значных ,(где k - количество о бра зов) предикатов и определения их истинности.
Б блоке 19 определяется номер параметра, место и причина возникновения аномальной (аварийной) ситуации с помощью алгоритмов логического распознавания образов, использующих бинарные признаки, т.е. принимающих значения О или 1.
Сигналы с блоков 19 и 20 поступают в блок регистрации и сигнализации и далее - в систему управления которая осуществляет управление . программным блоком 17 управления и объектом контроля в режиме устранения аварийных ситуаций и предотвра-щения аварий.
в блоке 16 регистрации фиксируются и осуществляются визуальная ийдикация причин и.времени простоя, аварийных ситуаций и аварийных значений параметра.
Программный блок управления содержит набор стандартных подпрограмм контроля, из которых формируется программа подключения датчиков к устройству в последовательности, обе печивающей наиболее быструю диагностику как состояния объекта, так и текущей технологической ситуации.
Таким образом, оператор получает информацию о принадлежности состояния контролируемого объекта к одному из подмножеств множества состояний в виде оценок: Исправное состояние (нормальная ситуация), Работоспособное состояние (аномальная ситуация) Неработоспособное состояние (аварийная ситуация), а также величины отклонений контролируемого параметра и скорости его изменения, являющейся характеристикой динамического состояния объекта контроля от заданного значения.
При этом оператор имеет возможность активно воздействовать на объект (производить настройку, наладку, ремонт или замену отказавших .лов и т.д.) и после этого производит запуск устройства по входу 27.
Перед выполнением нового цикла опроса датчиков на вход 28 подается тестовый сигнал проверки от системы управления и имитируется работа устройства в режиме проверки. В случае несоответствия реакции устройства на тестовый сигнал ожидаемой реакции в анализаторе системы управления формируется сигнал отказа, устройства выявления аварийных ситуаций; работа прекращается или подается сигнал на последовательное подключение рез.ервных блоков.
Все блоки, составляющие предлагамое устройство, могут быть реализованы на базе известных элементов и узлов цифро-аналоговых вычислительных машин или на базе элеменюв микропроцессорной техники.
Данная структура построения устройства обеспечивает расширение фунциональных возможностей и информатиности устройства, повышение точности и достоверности оценки текущей ситуации и прогнозирования ситуаций на прогнозируемые будущие периоды, повышение помехоустойчивости.
Применение предлагаемого устройсва на предприятиях черной .металлургии позволит увеличить время безаварийной работы оборудования на 5-10%, а производительность - на 0,5%, снизить потери полезного компонента в хвостах магнитной сепарации на 0,2% и повысить выход железа в концентрат на 0,22%.
Экономическая эффективность от применения на обогатительных фабриках средней производительности составит 57 тыс. руб. в год.
Формула изобретения
Устройство для выявления аварийных ситуаций, содержащее датчик, блок синхронизации, соединенный с первым блоком памяти, выход которого соединен с одним входом первого блока сравнения, первый выход которого соединен с одним входом первого ключевого элемента, блок дифференцирования арифметический блок, второй и третий блоки памяти, второй блок сравнения,.второй ключевой элемент и блок прогнозирования, первый и второй выходаз блока дифференцирования соединены с другим входом первого блока сравнения и первымвходом блока прогнозирования, выход блока синхронизации соединен с входами второго и третьего блоков памяти, первый и второй выходы второго блока пшияти соединены соответственно с первым входом Biroporo блока сравнения и вторым входом первого ключевого элемента, выход которого соединен с вторым входом блока прогнозирования, первый выход арифметического блока соединен с третьим входом блок прогнозирования, а второй выход арифметического блока соединен с вторым входом второго блока сравнения,
первый выход которого н выход третьего блока памяти соединены соответственно с первым н вторым входами второго, ключевого элемента, выход которого соединен с четвертым входом .блока прогнозирования, отличаю щ е е с я тем, что, с целью расширения функциональных возможностей и повышения качества и надежности диагностУ1ки аварийных ситуаций, в него введены дополнительные датчики, четвертый и пятый блоки памяти, Коммутатор, прогрггммный блок управления, дешифратор, первый и второй блоки распознавания ситуаций, блок регистрации и сигнализации, первые выходы первого и второго блоков сравнения соединены с первыми вторый вх,одами четвертого блока памяти, выход которого соединен с первым входом первого блока распознавания ситуаций, первый и второй выходы блока прогнозирования соединены с первым и вторым входами пятого блока памяти и блока регистрации и сигнализации соответственно, второй выход первого блока сравнения и второй выход второго блока сравнения соединены с третьим и четвертым входами блока регистрации и сигнализации, первый выход арифметического блока и выход блока дифференцирования соединены с третьим и четвертым входами пятого блока памяти, выход которого соединен с первым входом второго блока распознавания ситуаций, первый и второй выходы программного блока управления соединены с вторыми входами первого и второго блоков распознавания ситуаций, выходы которых соединены с пятым и шестым входами блока регистрации и сигнализации, третий выход программного блока уп0равления соединен с входом дешифратора, первый выход которого соединен с третьим входом четвертого блока памяти, второй вход - с пятым входом пятого блока памяти, а выход
5 соединен с входом блока синхронизации и первым входом коммутатора, выход блока синхронизации соединен с входами датчика, дополнительных датчиков и вторым входом коммутатора, выходы датчика и дополнительных
0 датчиков соединены с третьим входом коммутатора, выход которого соединен с входами блока дифференцирования и арифметического блока.
5
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 734726, кл. G 06 F 15/46, 1977.
2.Авторское свидетельство СССР
0 773663, кл. G 08 В 21/00, 1979 (прототип).



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выявления и классификации аварийных ситуаций | 1981 |
|
SU991464A1 |
| Устройство для диагностики состояния измельчительного агрегата | 1984 |
|
SU1192855A1 |
| Устройство для выявления аварийной ситуации | 1979 |
|
SU773663A1 |
| УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ, СИГНАЛИЗАЦИИ И ПРЕДОТВРАЩЕНИЯ АВАРИЙНЫХ СИТУАЦИЙ | 2001 |
|
RU2206921C2 |
| Устройство для селективного контроля телеметрических параметров объекта | 1982 |
|
SU1054913A1 |
| Устройство для выявления аварийной ситуации | 1990 |
|
SU1714638A1 |
| Устройство для контроля параметров функционирования сложных технических объектов | 1977 |
|
SU690448A1 |
| Система автоматического регулирования загрузки мельницы | 1981 |
|
SU1007729A1 |
| Устройство для предупреждения аварийных ситуаций | 1980 |
|
SU942085A1 |
| Самонастраивающаяся система автоматического управления процессом мокрого измельчения | 1981 |
|
SU1018106A1 |
