Изобретение относится к автоматике и вычислительной технике, а именно к системам оценки текущего состояния, выявления и сигнализации возникновения аномальных и аварийных ситуаций в сложных технических системах, например, технологических процессов обогащения руд, и может быть использовано для выявления, сигнализации и прогнозирования аварийных ситуаций и аварий в объектах Обогатительной технологии, химической и теплоэнергетической и других отраслях промышленности, где возникновение аварийных ситуаций и развитие, их в аварии сопровождается значительными потерями производства.
Известно устройство для выявления аварийных ситуаций, содержащее блок контроля, выход которого соединен- с входом экстраполятора, регистратор, блок памятиj блок выделения аварийного параметра, блок распознавания аварийного состояния, коммутатор и блок управления, при чем к выходам экстраполятора подсоединены информационные входы блока памяти, выходы которого соединены с соответствующими входами
коммутатора, выходы которого -подсоединены через блок распознавания аварийного состояния к пераому входу регистратора и входам блока выделения аварийного параметра, первый выход которого подсоединен к регистраторуj а второй выход - к первому управляющему входу блока памяти, второй управляющий вход ко10торого соединен с первым выходом блока управления, второй выход котО рого подключен к управляющему входу коммутатора 1.
Недостатками устройства являют15ся низкое быстродействие и надежность выявления аварийных ситуаций, обусловленные его схемной регшиза- хщей и неучетом динамики изменения контролируемых параметров, отсут20ствие возможности прогнозирования момента наступления аварийной ситуации, а вследствие этого ограниченная область применения и невозможность эффективного использования
25 для ряда специфических производств, например в обогатительной, химической, металлургической отраслях про-; млшленности.
Наиболее близким техническим ре шением к изобретению является устройство для выявления аварийных ситуаций, содержащее датчик контролируемрго параметра, три блока памяти, блок синхронизации, два блока сравнения, два ключевьи элемента, блок измерения скорости измерения параметра и блок прогнозирования.
Сигнал от датчика контролируемого параметра поступает на арифметический блок и на блок измерения скорости изменения параметра, а с них на два блока сравнения, в которых происходит сравнение измеренных величин с заданными значениями, поступакадими от первого и второго блоков памяти. В случае значимых отличий заданных и измеренных сигналы с первых выходов блока сравнения поступают «а первый и второй ключевые элементы которые соответственно подключают к блоку прогнозирования второй и третий блоки памяти, к другим входам блока прогнозирования подключены выходы арифметического блока и блока измерения, скорости изменения параметра.. В результате работы данного устройства к оператору и в схему индикации непрерывно поступают сигналы обоб- щенной характеристики качества функционирования контролируемого объекта в текущий и упреждаиощий моменты , времени, Порядок включения в работу всех блоков устройства определяет блок синхронизации по сигналам от системы управления или от оператора С 2 ..
Однако данное устройство не может быть использовано для выявления и осуществления дифференциальной диагностики аварийных ситуаций в сложных технических системах, характеризующихся множеством контролируемых параметров со сложными . причинноследственными связями, большими транспортными запаздываниями, наличием неконтролируемых возмущений.
Целью изобретения является расширение области применения устройства, т.е. обеспечение возможностей распознавания ситуаций, в том числе и аварийных, и повышение качества, и надежности диагностики аварийных ситуаций, аварий и отказов в сложных технических системах.
Поставленная цель достигается ем, что в устройство для выявления
классификации аварийных ситуаций,
сх держащее блок синхронизации, соеиненный с датчиком и первым, вторлм и третьим блоками памяти, выход первого блока памяти соединен с одним входом первого блока сравнения,
первый выход которого соединен с одним входом первого ключевого элеента, к второму входу которого подоединен выход второго блока памяти, выход датчика соединен с входами блока дифференцирования величины параметра и первого арифметического блока, выход которого соединён с другим входом второго блока сравнения и первым входом блока формирования сигналов предупреждения, второй выход первого блока сравнения и выход третьего блока памяти соедШнены соответственно с первым и втрым входами второго ключевого элемента, введены второй арифметический блок, третий, четвертый и пятый блоки сравнения, третий ключевой . элемент, первый и второй инверторы, первый, второй и третий элементы И, блок определения модуля скорости изменения параметра, блок определения знака скорости изменения параметра, вычислительный блок, элемент ИЛИ и блок сигнализации, выходы первого второго и третьего блоков памяти соединены с соответствующими входам вычислительного блока, выходы которого соединены с первыми входами третьего и четвертого блоков сравнения, выход блока дифференцирования величины параметра соединен через арифметический блок с вторым входом блока формирования сигналов предупреждения, входом блока определения знака скорости изменения параметра и входом блока определения модуля скорости изменения параметра, выход которого соединен с вторыми входами третьего и четвертого блоков сравнения, первый выход первого блока сравнения соединен с первыми входами первого элемента И и блока сигнализации, а второй выход - с первым входом второго элемента И и вторым входом блока сигнализации, первый выход блока определения знака скорости изменения параметра соединен с вторым входом первого элемента И, а второй выход с вторым входом второго элемента И, выход третьего блока сравнения соединен с. третьими входами первого и второго элементов И, выходы которых соединены с первым и вторым вхо дами элемента ИЛИ, выход четвертого блока сравнения соединен с третьим входом элемента ИЛИ, выход которого соединен с третьим входом блока сигнализации, выход первого арифметического блока соединен с первым входом пятого блока сравнения, выходы первого и второго ключевых элементов соединены с первыми и вторыми входами третьего ключевого элемента и вторыми входами второго и пятого блоков сравнения соответственно, выходы которых соединены с четвертыми и пятыми входами элемента ИЛИ и блока сигнализации, а через первый и второй инверторы с церйым и вторым входами третьего
элемента И, выход которого соединен с третьим входом третьего ключевого элемента, выход которого соединен с третьим входом блока формирования сигналов предупреждения, выход блока синхронизации соединен с шестым входом блока сигнализации.
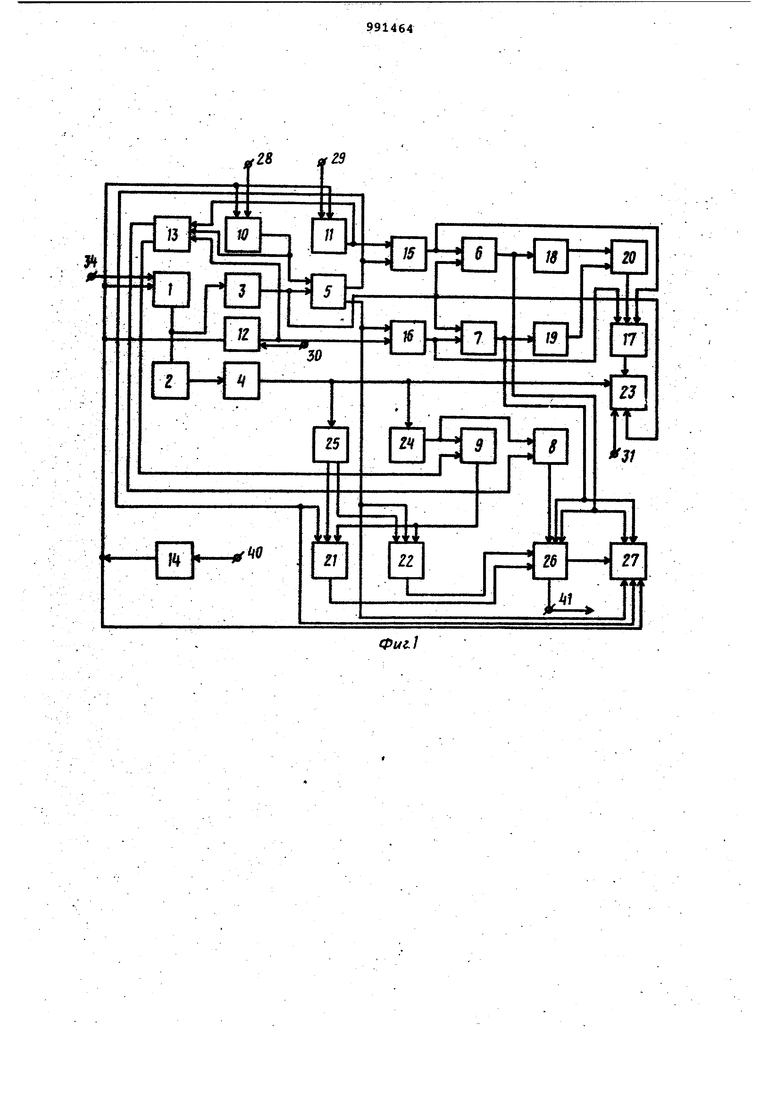
На фиг. 1 приведена структурная Ьхема устройства для выявления и . классификации аварийных ситуаций; на фиг. 2 - структурная схема вычислительного блока; на фиг. 3 - структурная схема блока формирования сигналов предупреждения.
Устройство для выявления и классификации аварийных ситуаций содержит датчик контролируемогс)па.раметра 1, блок дифференцированйя вёличи ны параметра 2, арифметические блоки 3 и 4, блоки сравнения 5-9, бло ки памяти 10-12, вычислительный блок 13, блок синхронизации 14, ключевые элементы 15-17, инверторы 18 и 19, элементы И 20-22, блок формирования сигналов предупреждения 23, блок определения модуля скорости 24, блок определения знака скорости 25, элемент ИЛИ 26, блок сигнализации 27.
В блок памяти 10 по входу 28 ввоДИ.ТСЯ от систе1 ы управления заданное значение контролируемого параметра ХЗОА .
В блок памяти 11 по входу 29 вводится максимально-допустимое значение контролируемого параметра
у МОКС
, АОП
в блок памяти 12 по входу- 30 вводится минимально допустимое значение контролируемого параметра Сдо
Величины, вводимые по входам 2830, не являются постоянными, а зависят от технического и технологического состояния сложного диагностируемого объекта, каким является, например, замкнутый цикл измельчения классификации руды на обогатительных фабриках, для которого, нагпример, заданное значение заполнения мельницы исходной рудой и песками классификатора и дoпycти Лыe значения(максимальное и минимальное) заполнения и скорости его изменения зависят от принятых условий иэмельчения и классификации, от типа перерабатываемой руды и состояния футеровочной брони мельницы и ее шаровой загрузки.
Арифметические блоки 3 и 4 служат для фильтрации помех и определения текущего взвешенного среднего значения сигнала от датчика контролируемого параметра и сигнала его производной.
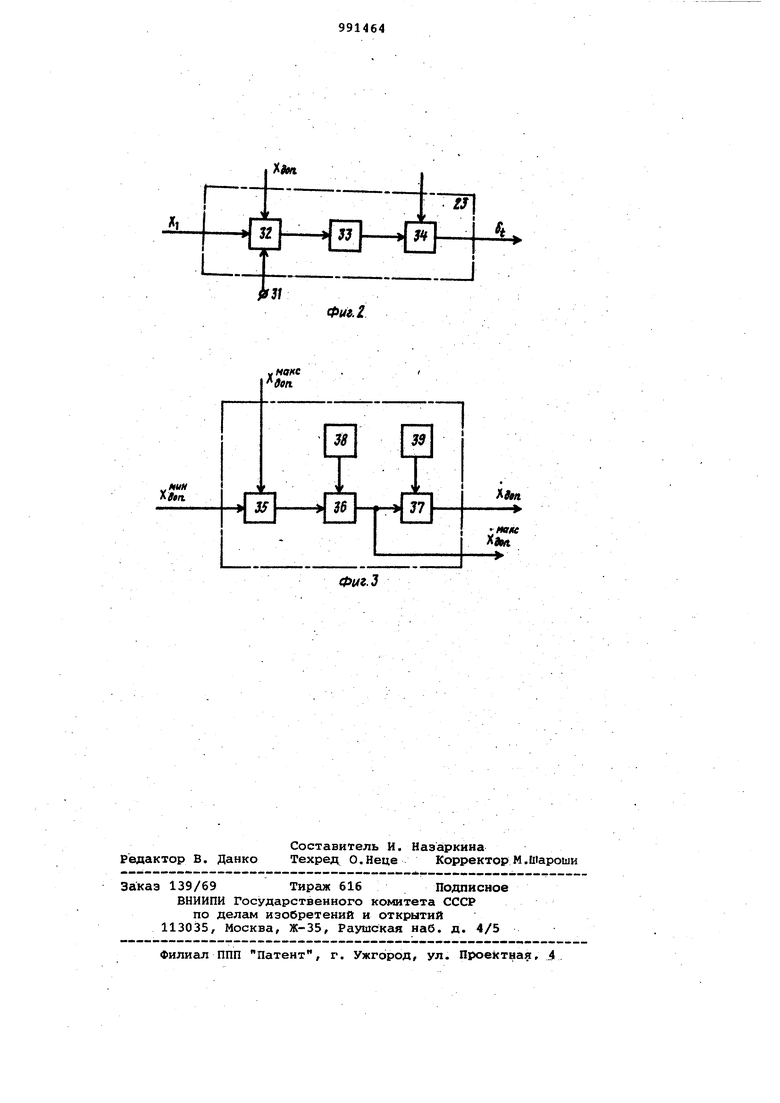
Блок 23 служит для прогнозирования момента значительного превышения или уменьшения значения контролируемого параметра над заданным значением параметра и определяет, через сколько времени возникает ава рийная ситуация (превышение значения контролируемого параметра над верхним или нижним допустимым значе нием). По входу 31 на блок 23 поступает сигнал коррекции прогноза от оператора или системы управления.
Блок 23 формирования сигналов предупреждения, показанный на фиг. 2, содержит блок вычитания 32, блок определения модуля сигнгша 33 и блок деления 34.
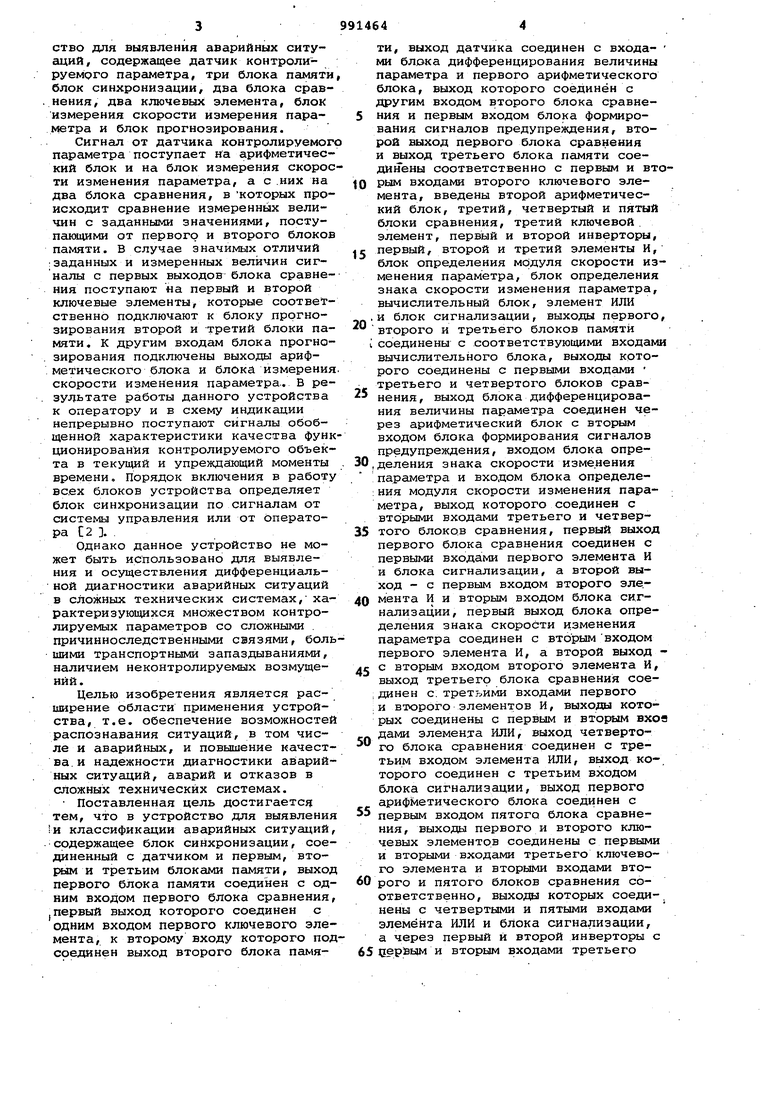
Один из вариантов вычислительного блока 13 показан на фиг. 3 и содержит блок вычитания 35, блоки деления 36 и 37 и два задатчика опорных сигналов 38- и 39.
Если обозначить значение контролируемого параметра в момент времени t через Х, а в момен-т времени tg через Х2, то считая, что в интервале контроля -dt tg - ti скорость изменения параметра X остается постоянной, можно записать
Х-г X 1 + XVja4- (ч)
Аварийной ситуацией будем называть отклонение контролируемого
параметра X от его допустимого значения. Признаками аварийной ситуации в системе автоматической стаби- лизации являются превышение X над
ХТР ьгтты v V
Т® в этом случае решение однозначно аварийная ситуация есть. В случае же, когда X вышел за пределы нормы, т.е. X Хзад Зад такОЙ
днозначности уже нет. Это вызвано тем, что в соответствии с выражени- м (.1 ) в зависимости от динамических свойств объекта регулирования значение контролируемого параметра
в момент времени 12 может занять различное положение. Из анализа траекторий переходов видно, что в случае когда скорость изменения параметра X по модулю /X/ значительно превышает максимально допустимую скорость изменения при регулировании, т.е. /X/ Хд независимо
от знака этой скорости и знака разности Хддд ЛХ, в системе возникла аварийная ситуация, а следо. макс вательно признак |Х I оп также
является признаком аварийной ситуации независимо от величины и знака л X.
макс В случаях, когда Х X j или
X3Qд , решение о наличии аварийной ситуации необходимо принимать из -анализа как действительной величины скорости измерения параметра X, так и ее знака.
Данная логика определения наличия аварийной ситуации заложена в .структуру и работу устройства.
Вход 40 устройства соединен с входом блока синхронизации 14. Выход элемента ИЛИ 26 соединен с выходом 41 устройства.
Устройство работает следующим образом.
Сигнал, соответствующий величине контролируемого параметра, поступае от датчика 1 на входы арифметического блока 3 и вход блока 2 и далее на вход арифметического блока 4. В блоках 3 производится фильтрация помех и усреднение сигнала, а с выхода блока 3 нормированное значение сигнала поступает в блок сравнения куда от блока памяти 10 поступает величина заданного значения параметра. I
Блок сравнения 5 двухканальный. Каждый канал состоит из схемы вычит ния и порогового элемента, причем на выходах пороговых элементов появляется сигнал тогда, когда разность сигналов, определяемых в схемах вычитания, больше нуля. На первом выходе блока 5 сигнал появляется, если Х .Xjc(A втором выходе - если Хз,.
. Сигналы с первого и второго выходов блока 5 открывают ключевые элементы 15 и 16, соответственно, которые пропускают на блоки сравнения б и 7 сигналы максимально допустимого значения параметра
АОП
ОТ блока памяти 11 и минимально допустимое значение параметра
от блока памяти 12.
В блоке сравнения 6 происходит вычисление значения разности Х Хдд| . Если данная величина больше
макс нуля, т.е. X., доп f на выходе
блока 6 появляется величина логической 1.
В блоке сравнения 7 происходит вычисление разности Х - Х. Если величина данной разности больше нуля, т.е. Хд Х, то на выходе
блока 7 формируется величина логической 1.
Сигналы логической 1 с выходов блоков 6 и 7 поступают на элемент ИЛИ 26 и В блок сигнализации 27, . где осуществляется индикация наличи аварийной ситуации и ее признака.
Сигналы с блоков сравнения 6 и 7 через инверторы 18 и 19 поступают на логический элемент И 20.
ЕСЛИ Х-„-„ х , то на
выходах блоков 6 и 7 формируются сигналы логического О, а соответственно на выходах инверторов 18 и 19 и элемента И 20 - логической 1. Сигнал логической 1 с выхода блока 20 включает ключевой элемент 17, разрешая прохождение на блок 23 сигналов от блоков памяти 11 и 12 через соответствующие ключевые элементы 15 и 16.
На блок 23 также поступают сигналы от арифметических блоков 3 и 4.
В блоке 23 осуществляется прогноз времени наступления аварийной ситуации по выражению
(ДОП
i -(21
1
где сЛ t .j - t - время до наступления аварийной ситуации ,
t - время контроляj tj - время наступления
аварийной ситуации АОП допусковое значение контролируемог параметра (максимальное допустимые значения);
Х - текущее значение . контролируемого параметра в момент времени t-,; Х - текущее значение
скорости изменения параметра в момент . времени
/ / - знак модуля разности сигналов.
Влок 23 состоит из простейших элементов, выполняющих операции вычитания, деления и определения модуля по выражению (2 ).
Одновременно с этим сигналы с блоков памяти 10-12 поступают в вычислительный блок 13, где осуществляется вычисление значения максимално допустимой скорости изменения параметра Хд и допустимой скорости изменения параметра по выражениям
Умакс мин макс Хдоп
Аоп j ;
макс мин
Д° ДО - 1 у /.,
MCIKC
-л ЛЛГЧll /
2-at АОП
где 4t - интервал контроля.
Максимально допустимая скорость
макс
изменения параметра X д, - это скорость, при которой значение величины контролируемого параметра X,- изменяется от Хд до Х за период контроля 4t, а допустимая скорость изменения параметра Это скорость, при которой значение Х может изменится до Хдоп
V
ХАОП от Хздд. ...
Если величины Ли й не равны,
(S)
л - Хэслд (
АОП
Л- Y - V .
U) , ЛАОП р
то Х
лоп определяется как отношение минимальной из величин и или й к ми ник .величине периода контроля t
л . min(d, Д-) Аоп-Jt V
Техническая реализация блока 13 также проста и его блок-схема содержит блоки вычитания и деления, реалиэукяцие выражения (3) и (4) , или (3)-(7).
Вычисленные значения ЗСдоп
поступают с выходов блока 13 на входы блоков сравнения 8 и 9, где происходит сравнение данных величин с модулем скорости изменения параметра -Х.
Если Х , то с выхода блока сравнения 8 сигнсШ поступает на лемент ИЛИ 26 от сигнализации наличия аварийной ситуации в блоке сигнализации 27.
Одновременно с этим в блоке 25 определяется знак величины скорости изменения параметра.
Если I л I 7 Jt/von X Хзад и X 0, то на вход элемента И 26 поступают сигнсшы логической 1 из блока 9- второго выхода блока 5 и второго выхода блока 25, ас выхода элемента И 22 поступает сигнал наличия аварийной ситугщии на блоки 26 и 27.
Также если X , |Х ) Хд i 0, то сигналы логических 1 поступают на элемент И 21 с первого выхода блока 5, выхода блока 9 и . первого выхода блока 25 и с него логическая 1 поступает на блоки 26 и 27.
Следовательно, признаками аварийной ситуации будут
X Хдоп - ситуация S,-,
X - ситуация
- ситуация
,д, , ГХ/.доп- ситуация S4,.
X X злд , X О, / X ; Хдог, - ситуаи я SsВ случае наличия одной из ситуаций Sf из множества S, S , Sj устройство сигнализирует о наличии аварийной ситугщии. В блоке 27 отображаются тгисже факт выхода за пределы допуска и за пределы заданных значений величины контролируемого параметра.
Управление работой блоков устройства осуществляется от блока . o синхронизации 14 по входу 40.
По выходу 41 кодовые комбингщии О и 1 поступают в классификатор системы управления сложным объектом диагностики, где производится оцен5 ка текущей ситуации по множеству контролируемых параметров и их признаков с помощью алгоритмов логического распознавания образов.
Такая структура построения уотройства обеспечивает раооирение
.функциональных возможностей и инфор мативности, повышение надежности и качества выявления аварийных ситуа ций, устранение ложных срабаплваний 5 устройства за счет учета динамических признаков контролируемых лара, метров.
Применение предложенного устройства на обогатительной фабрике РУ Q им. Дзержинского позволит увеличить время безаварийной работы оборудо- вания на 5-10%, увеличить производительность на 0,5%, снизить потери полезного компонента в хвостах магнитной сепарации на 0,2%, повысить выход железа в концентрат на 0,22%.
Экономический эффект от совместного применения предложенного устройства с системой диагностики состояния технологического оборудования составит 57 тыс. руб. в год.
Формула изобретения
Устройство для выявления и классификации аварийных ситуаций, со- держащее блок синхронизации, соединенный с датчиком и первым, вторым
и третьим блоками памяти, выход первого блока памяти соединен с одним входом первого блока сравнения, первый выход которого соединён с одним входом первого ключевого элемента, к второму входу которого подсоединен выход второго блока памяти выход датчика соединен с входами блока дифференцирования и первого арифметического блока, выход которого соединен с другим входом второго блока сравнения и первым входом блока формирования сигнгшов пре дупреждения, второй выход первого блока сравнения и выход третьего блока памяти соединены соответственно с первым и вторым входами второго ключевого элемента, отличающееся тем, что, с целью расширения области применения устрой.ства, повышения качества и надежности диагностики аварийных и аномальных ситуаций, в него введены второй арифметический блок, третий и четвертый и пятый блоки сравнения, третий ключевой элемент, первый и второй инверторы, первый, второй и третий элементы И, блок определения модуля скорости изменения параметра блок определения знака скорости иэ менения параметра, вычислительный блок элемент ИЛИ и блок сигнализации, выходы первого, второгр и третьего блоков памяти соединены с соответствующими входами вычислительного блока, выходы которого соединены с первыми входами третьего и четвертого блоков сравнения, выход блока дифференцирования величины параметра соединен через арифметичеI кий блок с вторым входом блока формирования сигналов предупреждения, входом блока определения знака скорости изменения параметра и входом блока определения модуля скорости изменения параметра, выход которого соединен с вторыми входами третьего и четвертого блоков сравнения, первый выход первого блока сравнения соединен с первыми входами первого элемента И и блока сигнализации, а второй выход с первым входом второго элемента И и вторым входом блока сигнализации, первый выход блока определения знака скорости изменения параметра соединен с вторым входом первого элемента И, а второй выход - с вторым входом второго элемента И, выход третьего блока сравнения соединен с третьими jвходами первого и второго элементов И, выходы которых соединены с первым и вторым входами элемента ИЛИ, выход четвертого блока сравнения соединен с третьим входом элемента ИЛИ, выход которого соединен
0 с третьим входом блока сигнализации, выход первого арифметического блока соединен с первым входом пятого блока сравнения, выходы первого и второго ключевых элементов соедине5 ны с первыми и вторым входами третьего ключевого элемента и вторыми входами второго и пятого блоков срав нения соответственно, выходы которых соединены с четвертыми и пятыми
Q входами элемента ИЛИ и блока сигнализации, а через первый и второй инверторы с первым и вторым входами треть его элемента И, выход которогр соединен с третьим входом тре5 тьего ключевого элемента, выход которого соединен с третьим входом блока формирования сигналов предупреждения, выход блока синхронизации соединен с шестым входом блока сиг ализации.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 734726, кл. G 06 F 15/46, 1977.
.2. Авторское свидетельство СССР 773663, кл. G 08 В 21/00, 1979 прототип .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики состояния измельчительного агрегата | 1984 |
|
SU1192855A1 |
| Устройство для выявления аварийных ситуаций | 1981 |
|
SU963029A1 |
| УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ, СИГНАЛИЗАЦИИ И ПРЕДОТВРАЩЕНИЯ АВАРИЙНЫХ СИТУАЦИЙ | 2001 |
|
RU2206921C2 |
| Устройство для выявления аварийной ситуации | 1979 |
|
SU773663A1 |
| Устройство для выявления аварийной ситуации | 1990 |
|
SU1714638A1 |
| Система управления нагрузкой в объектах с переменным гидравлическим сопротивлением | 1983 |
|
SU1164671A1 |
| Вычислительное устройство для решениязАдАчи ВыпРАВКи жЕлЕзНОдОРОжНОгО пуТи | 1977 |
|
SU802967A2 |
| Устройство для выявления аварийной ситуации | 1978 |
|
SU744693A1 |
| Устройство для управления технологическими параметрами | 1984 |
|
SU1196900A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2004 |
|
RU2277051C2 |