(54) УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ АВАРИЙНЬГХ
СИТУАЦИЙ


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предупреждения аварийных ситуаций | 1977 |
|
SU638998A1 |
| Устройство для предупреждения аварийных ситуаций | 1980 |
|
SU947890A1 |
| Устройство для предупреждения аварий-НыХ СиТуАций | 1979 |
|
SU840818A1 |
| Устройство для выявления аварийных ситуаций | 1981 |
|
SU963029A1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| Устройство для предупреждения ошибок формирования команд управления | 1983 |
|
SU1126984A1 |
| Устройство для выявления и классификации аварийных ситуаций | 1981 |
|
SU991464A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| Система программного управления | 1980 |
|
SU941934A1 |
Изобретение относится к автоматязнрованному утфавпению и контролю сложных технических объектов, а точнее к устройствам для осуществления централизованного автоматического контроля работоспособности в качестве функционирования сложных технических объектов, характеризующихся множеством параметров со сложными причшшо-следственными связями, наличием случайных не контротшруемых возмущений, большими потерями производства в случае возникновения аварийных ситуаций и при ра витии их в аварии. Устройство может найти применение в диагностике, в системах автоматического контроля и отыскания неисправностей и может быть исп ользовано на промышленных предприятиях в горнообогатятепьной, металлургической, химическо и других отраслях промышленности. Известны устройства для предупреждения аварийных ситуаций, содержащие элементы предохранения от случайного задевания органов в процессе работы i или содержащие инструкции оператору о том, на каком режиме можно включать срган управления, а на каком нельзя Ij. Однако оператору трудно определить режимы, опасные для переключения органа управления из-за сложной границы опасного режима. Наиболее близким к предлагаемому является устройство предупреждения аварийньгх ситуаций, содержащее датчики, последовательно соединенные орган управления, блокирующий элемент и исполнительный механизм, последовательно ; соединенные датчик прикосновения к органу управления, блок задержки и первый ключевой элемент и последовательно соединенные вычислитель сласного режима, второй ключевой элемент и индикатор опасного режима, В данном устройстве выход вычислителя опасного режима подключен к блокирующекгу элементу через первый ключевой элемент, выход датчика прикосновения к органу
управления подключен к входу вычиолитепя опасного режима t2j .
Недостаток известного устройства низкие функциональные возможностаг у:стройства, что вызвано отсутствием
возможности быстрого вьшода объекта из опасной зоны.
Крсяие того, известное устройство не обеспечивает надежного предупреждения аварийных ситуаций в сложных технических объектах, характеризующихся наличием сложных причинно-следственных связей между параметрами, характераазующими ход ведения процесса, а также наличием рециклов между технологическимн агрегатами.
Недостатками известного устройства являются также невозможность без участия оператора принимать решения по выбору оперативных управляю.щих воздействий в аварийных ситуациях и низкое качество управления в режиме нормальных и аномальных ситуаций.
Цель изобретения - расширение функциональных возможностей устройства, увеличение быстродействия и надежности ликвидации аварийных ситуаций и вывода объекта из аварийного режима и повышение качества упрарления во всем диапазоне технологических ситуаций,
Поставленная цель достигается тем, что в устройство дпя предупреждения аварийных ситуаций, содержашее индикатор опасного режима, последовательно соединенные блок управления, блокируюИЩИ элемент и исполнительные механизмы, последовательно соединенные датчики, вычислитель опасного режима, первы выход которого через первый ключевой элемент подключен к блокирующему элементу, а второй выход подключен к входу второго ключевого элемента, блок задержки, выход которогчэ подключен к второму входу первого ключевого элемента, введены последовательно соединенные третий ключевой элемент, два блока классификации ситуаций, коммутатор, блок naмята, блок вычисления управляющих воздействий и второй блокирукнций элемент, а также последовательно соединенные
второй блок классификации ситуаций и блок аварийного отключения, причем входы третьего ключевого элемента соединены с выходами датчиков и вычислителя опасного режима, а выход соединен с входом второго блока классификации ситуаций, один выход которого подключен к входу блока аварийного отношения; другой выход которся о соединен с входом ком{ утатора, вход второго блокирующего элемента через второй ключевой элемент соединен с выходом блока задержки, а выходы соединены с входами блока исполнительных механиет-1ов и с первым входом блока задержки, к второму входу которого подключен выход блока управления, другие выходы котсфого соединены с входами вычислителя опасного режима, выход которого соединен с входом индикатора опасного режима, а выходы датчиков соединены с входами блока управления и блока вычисления управляюших воздействий. i
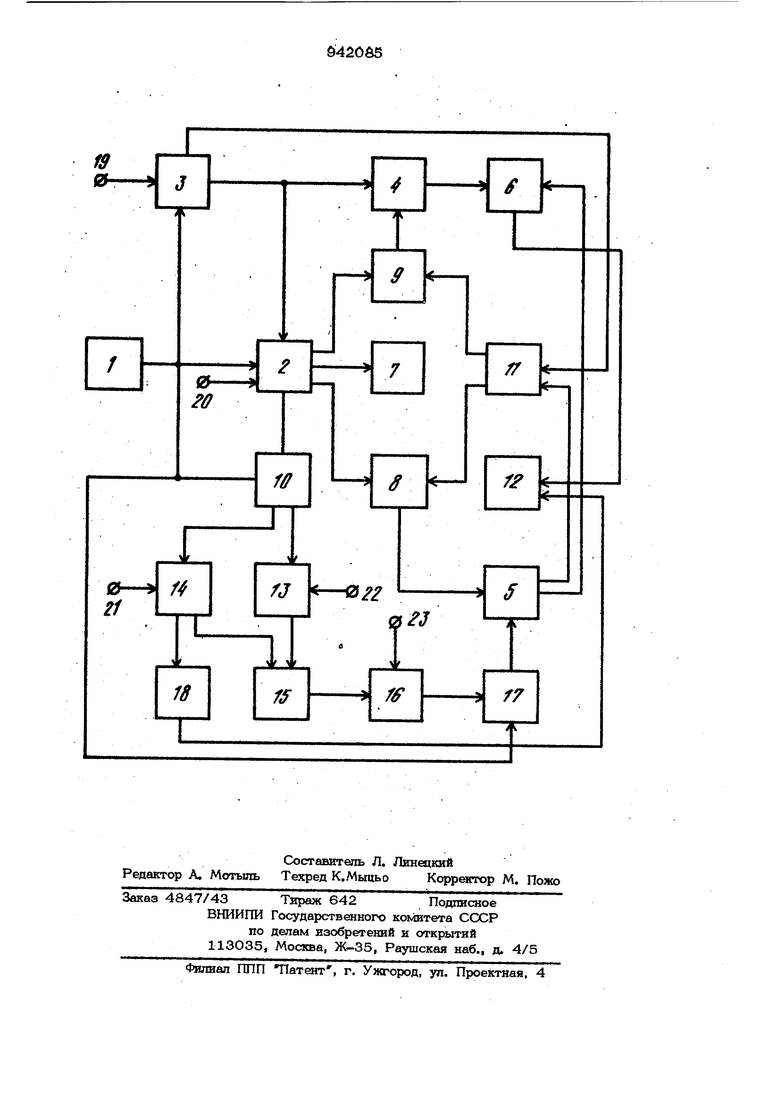
На чертеже представлена функциональная схема устройства для предупреждения аварийных ситуаций.
Устройство содержит датчики 1, вычислитель 2 опасного режима, блок 3 управления, блокирующие элементы 4 и
5,исполнительные механизмы 6, индикатор 7 опасного режима, ключевые элементы 8 - 1О, блок 11 задержки, объект 12 контроля, блоки 13 и 14 классификации ситуаций, коммутатор 15,
блок 16 памяти, блок 17 вычисления управляющих воздействий, блок 18 аварийного отключения.
Устройство работает следующим образом.
Сигналы с датчиков 1 одновременно поступают в вычислитель 2 опасного режима, блок 3 управления и блок 17 и элемент 10 контура вывода из аварийного режима. Все сигналы нормируются, фильтруются и усредняются по методу скользящего среднего.
В начале работы по сигналу от блока-3 управления блок 11 задержки выдает сигнал повышенной амплитуды на ключевой элемент 9, состоящий из элемента И и триггера Шмидта, выходы которых объединены и являются общим выходом элемента 9. В этом случае блокирующий элемент 4 выключен и осуществляется реализацией управляющих воздействий исполнительных механизмов
Совместная работа элемента 8 и блока 11 происходит аналогично. Вектор параметров поступает в вычио питель 2 опасного режима, в котором производится распознавание производств венной ситуации, т.е. отнесение текущей производительности сзггуашщ к одной из трех ситуасий - нормальная, аномальная аварийная прсшзводственная ситуации. В вычислителе опасного режима границы области технологических ситуаций описаны путем построения логико-предикатных уравнений вида { A(KH)(2)AAjCK)(i() J AieKH)Ci()AAj(K)(i() i )Aj(K-i)a)vXjtV){)} Аж(К-1)(х;АА(.ККх}, (1) где А (i) - предикат, описывающий J производстветшую сятуашпо 9 стО5ШИЯ техногюгяческой лишш в момент времени К j - номер текущей производственной ситуации; ум - количество распознаваемых ситуаций. Каждал и предикат А.(и)() описывает область внутри гиперсферы радиуса Г , которая определяется по выражению ())4 где Р и 5 , p-5t и - координаты соответствующих векторов; Ai - булева переменная, соответствующая каждой гиперсфере, описывающей границы образов SцSдy,,5дJj- в М -мерном пространстве производственных ситуаций; i - ном производственной ситуа ции, )4(Vrl (3) Определение принадлежности вектора к одной из производстве1шых ситуаций л , т.е. осуществляется путем определения номера л ,. в котором нети нен предикат ). Предикат Р, (К) истинен, когда Хе9и соответственно будут истинными предикаты ) и ъ(у) вектор будет щшнадлежать областям 5дн или 5дв. В соответствии с этим вычислитель 2 сятасного режима вырабатьтает управляю щий сигнал ( ,еслиР /0 о,еСАмР2 0 (.если При нормальном режиме работы положительный сигнал поступает на ключевой элемент 8, разрещая отработку управляющих воздействий от блока 3 управление исполнительными механизмами 6. В этом случае индикатор 7 опасного режима, блокирующий элемент 4 и контур вывода нз аварийного режима отключены я блокирующий элемент 5 включен. В блоке 3 управления производится классификация нормальных технологических ситуаций по правилам (1) и (2), т.е. область нормальщ 1Х технологических ситуаций разбивается на подобласти 5щ , 5н2. 5НЪ соответствие с принятой целевой функцией управления, определяется принадлежность текущей ситуации вм, к одной из подобластей 5щ , SHZ , SHJ производится выработка управлякшшх воздействий, необходимых для ьшода процесса в оптимальную область - область максимума функции управления. В режиме оптимального управления для уточнения границ, разделяющих области технологических ситуаций и величин управляющих воздействий, используются обучающиеся алгоритмы метода стохастической аппроксимации, позволяющие устранить неопределенность, вызванную кваааястаиионарностью технологического щюцесса и малым количеством информации, на основе которой нужно принимать рещение по управлению. Если режим работы является опасным для переключения исполнительных механизмов, с выхода вычислителя 2 поступает сигнал пониженной амплитуды (логический О или I) и ключевой элемент закрывается, включал блокирующий элемент 4. В этом случае сигнал поступает на индикатор 7 опасного режима и ключевой элемент 10 контура вывода из аварийного режима и через ключевой элемент 8 и блокирующий элемент 5, который пропускает сигналы немедленного регулирования на возникщую сятасную ситуацию от блоков 17 и 18. В элементе 10 в зависимости от величины сигнала осуществляется выбор соответствуют щих блоков 13 или 14, в которых аналогично выщеуказанному осуществляется выработка управляющих воздействий по вьшоду объекта в режиме нормальной эксплуатации, юш значительно заранее определенного снижения нагрузки или немедленного полного снятия нагрузки и отключения технологических агрегатов, в случае отсутствия аварийных ситуаций, но наличия аномальных ситуаций, включается блок 13, в котором происходит классификашш аномальных ситуаций. Коммутатор 15 подключает к блоку вычисления управл5П01цих воздействий соответствующие ячейки памяти бпокя 16 памяти. Блок 17 осуществляет жесткую программу наискорейшего вывода объекта в область нормальных режимовпутем определения рассогласования между задашлымн значениями параметров от блока 16 памяти я значениям сигналов от датчиков 1. В случае наличия аварийных ситуаций сигнал от блока 16 памяти поступает на блок 14, где производится проверка на наличие аварии. Если авария есть, сигнал с блока 14 поступает на блок 18 аварийного отключения. Если авар9Ш нет, то сигнал с блока 14 посту пает на коммутатор 15 и далее работа составных частей контура вывода осуществляется аналогично работе при аномальных ситуациях. Дифференциальная диагностика ситуации на аномальные и аварийные производится по величинам отклонений параметров от нормали и скорости изменени этих параметров во времени. По выходам 19 - 23, осуществляетс режим обучения блока 3, вычислителя 2, блоков 14, 13 и 16 при предварительном обучении. Сигнал с блока 17 через блокирующий элемент 5 поступает на блок 11 задержки, который через время, величина которого определяется временем окончания переходного процесса в систе ме, подается сигнал на запирание элемента 8 и открьгаание элемента 9, приводя систему в исходное положение. Если режим не вышел из области аномальных ситуаций, то на выходе вычислителя 2 опасного режима сохраняется сигнал наличия опасности и продолжает осущест .вляться режим вывода из области анома ных ситуаций. Применение предлагаемого устройств позволяет уменьшить вероятность возник вения аварийных ситуация и снизить потери от работы объекта в режиме аномальных ситуаций, повысить быстродейсгвие вьюода объекта из опасного режима и повысить качество управлений сложными производственными процессами во всем диапазоне технологических ситуаций. Формула изобретения Устройство для предупреждения аварийных ситуаций, содержащее индикатор опасного режима, последовательно соединенные блок -утфавления, блокирующий элемент и исполнительные механизмы, последовательно соединенные датчики, вычислитель опасного режима, первый выход которого через первый ключевой элемент подключен к блокирующему элемеоту, я второй выход подключен к входу второго ключевого элемента, блок задержки, выход которого подключен к второму входу первого ключевого элемента, отличающееся тем, что, с целью расширения функциональных возможностей и увеличения быстродействия устройства, в него введены третий ключевой элемент, два блока классификации ситуаций, коммутатор, блок памяти, блок вычисления управляющих воздействий и второй блокирующий элемент, и блок аварийного отключения, входы третьего ключевого элемента соединены с выходами датчиков и вычислителя опасного режима, а выход соединен с входом второго блока классификации ситуаций, один выход которого подключен к входу блока аварийного отношения, другой выход к входу коммутатора, вход второго блокирующего элемента второй ключевой элемент соединен с выходом блока задержки, а выходы соединены с входами блока исполнительных механизмов и с первым входом блока задержки, к второму входу которого подключен выход блока управления, другие выходы которого соединены с входами вычислителя опасного режима, выход которого соединен с входом индикатора опасного режима, а выходы датчиков соединены с входами блока управления и блока вычисления управляющих воздействий. Источники информации, принятые во внимание при экспертизе 1.Введение в эргономику. Под. ред. В. П. Зинченко, М., Сов. радио, 1974, с. 185. 2.Авторское свидетельство СССР NO 638998, кл. Ся08 В 21/00, 1977 (прототип).
