(54) УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛИ НА ЭКРАНЕ ИНДИКАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Цифровой преобразователь системы координат | 1977 |
|
SU656195A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 1995 |
|
RU2115947C1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2231820C2 |
| Узел отображения информации тренажера операторов систем управления | 1981 |
|
SU980119A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
| Предохранительное устройство для стрелового крана | 1978 |
|
SU1118603A1 |
| Генератор напряжений | 1982 |
|
SU1129718A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ ЦЕЛЕЙ | 1984 |
|
RU2121700C1 |
- . .1 . .. . . .
Изобретение отйосится к моделированию и может быть использовано в .уст-ройствах, предназначенш 1Х для обучения операторов работе на приборах, отображающих положение целей на индикаторах. Известно устройство для преобразования прямоугольных координат в полярные содержащее соединенные последовательно первый компаратор, счетчик, синусно-косинусный преобраз ова тель два блока деле- | g ния, второй компаратор и пёрекгаочате.ль, входы прямоугольных координат устройства соединены с первыми входами соответствующих блоков деления и с соответствующими входами второго компара- ts тора, вторые входы блоков деления подключены к соответствуюшта выходам синусно-косинусного преобразователя, вы-. ходы блоков делеmw соединены с соответствующимт входами первого компара- 20 тора и переключателя, управляюпшй вход которого подключен к выходу второго компаратора, выходы перекшочателя TI счетчика являются выходами устройства| 1
Недостатком данных устройств является низкая точность преобразоватш коор динат при углах, синус или косинус которых блТЕЗОК к нулю.
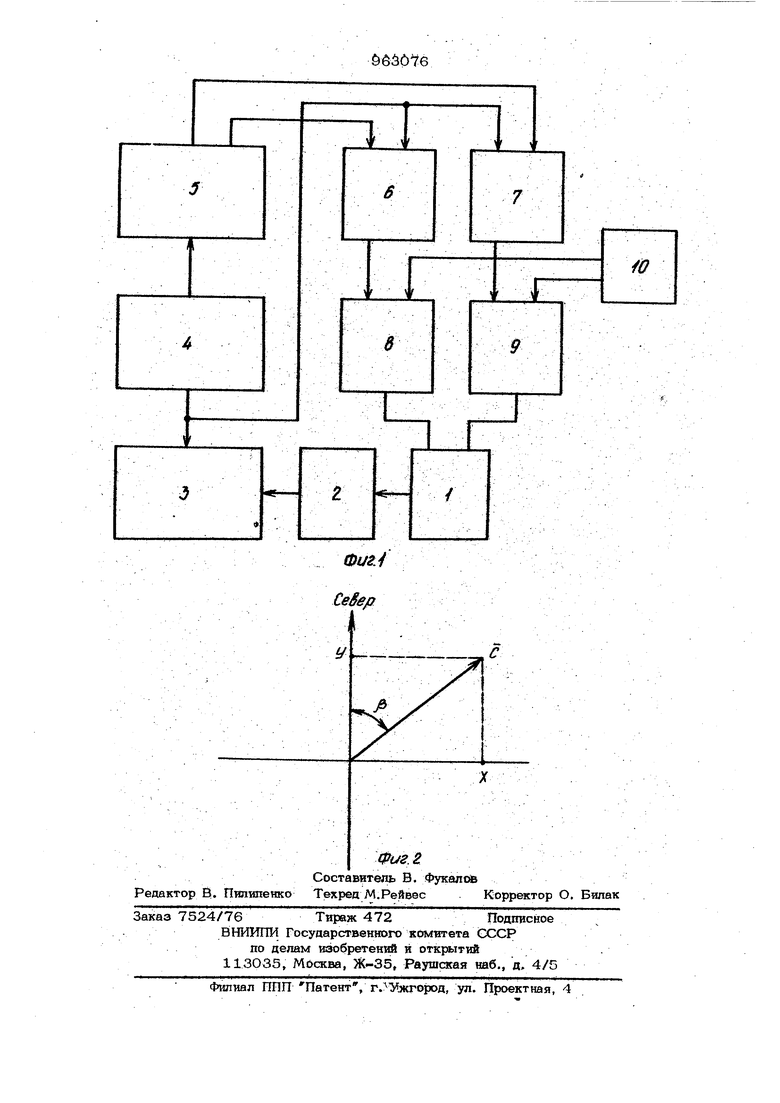
Наиболее близким по технической сущности к предлагаемому является устройство для имитации пространственного положения целей на экране индикатора, содержащее вычислитель, выход которого подключен через блок согласования к модулятору электроннолучевой трубки инди-. катора, генератор импульсов меток дальности, элемент И и подключенные к индккатору блок имитации вращения и формирования развертки и блок фор ирования развертки дальности. Выходы счетчика импульсов - меток дальдасти сигналы,: с входами вычислителя, а вход через элемент И подключен к генератору импульсов и выходу блок имитации вращения антенны и формирования развертки, счетчик 11мпульсов азиь1ута, выходы которого подключены к соответствующим - входам вычислителя, а вход поисоепинен к выходу переполнения счетчика импульсов меток дальности и к выходу блока форм «рования резверткм цальности f2J. Известное устройство используется для отображения только тех целей, координаты KOTopbJn вычислены в полярной сис теме координат, причем отображение рассчитанного азимута цели на eispaHe индикатора недостаточно точно, так как счетчик азимута н азимутальная развертка индикатора синхронизируется только один раз за |1ериод обращения антенны. Таким образом, существуюпше устройства позволяют отображать на индикаторе только те цели, координаты которых рассчкганы в полярной системе координат. .Вычисление коо щинат цели вычислителями производится в большинстве случаев в прямоугольной системе координат вспедствие простоты вычислений и возможнооти использования этих координат в различных вспомогательных регистраторах. Для дальнейшей индикации на инджаторах кругового обзора необходимо преобразова ние в полярную систему координат, что ведет к усложнению №1числений. Цель изобретения повышение точнос ти индикации по азимуту развертки. Поставленная цель достигается тем, что в устройстве сравниваются координаты цели, рассчитанные в прямоугольной системе координат на двух схемах сра&нения с проекциями точек радиальной раз вертки на соответствующие оси прямоугольной системы координат при каждом .положении азимутальной развертки в течение всего периода развертки. Для этог устройство, содержащее элемент И, дат чик напряжения, пропорциональных положению цели, последовательно подключе ные согласующий усилитель и ивдикатор, синхронизирующий вход которого соединен с выходом датчика напряжения, пропорционального положению антенны, содержит две схемы сравнения, два интеграла и синусно-косинусный преобразователь, вход которого соединен с вторым выходом датчика напряжения, пропорционального положению антенны, а каждый выход синусно-косинусного.преобразователя через соответствующий интегратор и схему сравнения подключен к одному ю входов элемента И, соединенного выходом с входом блока согласования, другие входы интеграторов подключены к синхронизирующему входу индикатора, а другой вход каждой схемы сравнения соединен с соответствующим выходом датчика на9664 пряжения, пропорционального положению пели. На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - схема разложения вектора радиальной развертки. Устройство содержит последовательно соединенные элемент И 1, блок 2 согласования и индикатор 3. Второй вход индикатора соединен с выходом датчика 4 напряжения, пропорционального положению антенны. Второй выход датчика 4 соединен с входом синусно-косинусного ipeобразователя 5. Выходы синусно-косинусного преобра-. зователя 5 соединены с входами двух интеграторов 6 и 7, выходы которых соединены соответственно с входами двух схем 8 и 9 сравнения, соединенных своими вторыми Входами с соответствующими выходами датчика 10 напряжения. пропорционального положению цели. Выходы схем 8 и 9 сравнения соединены с входами элемента И 1. Чтобы избежать преобразования коор динат целей в устройстве, при каждом значении азимута круговой развертки радиуо-вектор радиальной развертки раскладывается на две составляющие, по осям прямоугольной системы координат, одна ось которой совпадает с направлением на север (фиг. 2). Составляющие радиусавектора интегрируются во времени. Величины интегралов соответствуют проекциям пути пройденного лучом по экрану индикетора в каждый момент, времени, т.е. являются координатами точки радиальной развертки при данисм азимуте в избранной системе координат. Координаты радиально-круговой развертки сравниваются с соответствующими координатами цели, вычисленными в прямоугольной системе координат, т.е. реализуется система уравнений. X « с t- sin pfу - с . где X и у - координаты цели; с - скорости радиальной развертки индикатора; р - азимут разверни; t - текущее время. В соответствующий момент времени при определеннсм азимуте наступает временное совпадешге равенств уравнений. В этот момент времени производится отметка цели на индикаторе. Устройство работает следующим образом. Напряжение с выхода датчика 4 имитирует вращение антенны локатора. С его Ейыхода старается сигнал, синхро{газтфующий круговую развертку индикатора 3, а с; другого снимается сигнал, пропорциональный углу разворота антенны, огсчитайному от направления на север, который поступает на вход синуснокрсинусного преобразователя 5. G выхо.дов синуснр-косикусного преобразователя снимаются сигнальГ, пропорциональвью синусу и косинусу азимута антенны,,
Каждый импульс сишсроиизашга радиальной развертки включает интеграторы . 6 и 7, на входы которых соответственно прступаю т сигналь с выходов синуснокосинусного преобразователя 5.
На выходе интеграторов 6 и 7 появляются линейно-изменяющиеся .величины пропорционаттьнЫе путям, пройденным лучом по экрану индикатора в щправлении соответствующих осей прямоугольной сиетемы координат в зависимости от врем.ени, начало отсчета которого совдадает с моментом начала радиальной развертки, Эти текущие координаты развертки, снимаемые с .выходом интеграторов 6 и 7, сравниваются на схемах 8 и 9 сравнения с соответствующими координатами цели, рассчитанными в прямоугольной системе координат и подаваемыми с датчика 10. Сигналы равенства снимаются с .выходов схем 8 и 9 сравнения при .условии, когда величины координат цели и координат раз вертки совпадают.
При определенном угле поворота антенны и определенной дальности по радиальгной. развертке сигналы равенства с выхс;дов схем сравнения совпадают по времени и момевт совпадения при зтом фиксируемся элементом. И 1, через блок 2 согласования производится на Индикаторе 3 яркостная отметка цели.
Совпадение по времени Еалхрдных сирналов схем 8 и 9 сравнения, означает, что азимут антенны совпадает с азим.у- том цели, л время от момента запуска радиальной развертки до момента срабб - тывания схемы совпадения пропорцирнально времени прохождения зондирующим импульсом расстояния от локатора до цели.
Причем в момент индикации цели датчик 4 жестко синхронизирует угол разворота луча индикатора и значение угла, поступающего на вход синусно-косинусного преобразователя 5,что повышает точность отображения азимута цели.
Количество имитируемых целей в данном устройстве определяется количеством схем сраВ;Нения и количеством параллельных выходов датчика iO, с которых снимэ ются координаты других целей.
Ф о р м у л а изо б р е т е н и я
Устройство для О1тображения пространственного положения дели на экране индикатора, содернсащее элемент И, датчик .напряжений,.пропорциональкых положению «ели, последовательно подключенные согласующий усилитель и индикатор, син сронизнрующий вход которого соединен с Ьыходом датчика напряжения, пропорционального положению антенны, отличающееся тем, что, с целью повышения точности индикации по азимуту развертки, оно содержат синусно-косинуснь1й преобразователь, две схемы сравнения и два интегратора, причем вход с нусно-крсинусного преобразователя сое:динен с вторым выходом датчика напряжения, пропорционального положению антень1-; а каждый выход синусно-косинусного преобразователя через соответствующий интегратор и схему сре1внения подключен к одному из входов элементами, соединенного выходом с входом блока согласования, друтше входы интеграторов подключены к синхронизирующему входу индикатора, а другой вход каждой схемы сравнения соединен с соответствутощим выходом датчика напряжения, пропорционального положению цели.
Источники информации, принятые во внимание гри экспертизе
