Изобретение относится к устройствам управления и стабилизации измерительных устройств на качающемся основании и может быть использовано для управления лучом антенны мобильной РЛС обнаружения.
Известно устройство управления положением диаграммы направленности антенной мобильной РЛС обнаружения, сходное по технической сущности, достигаемому результату и используемое в РЛС обнаружения 1РЛ144 3ПРК 2С6 "Тунгуска" [1]. Это устройство может быть принято в качестве аналога и прототипа.
Функциональная схема устройства управления положением диаграммы направленности антенны прототипа приведена на фиг.1. Устройство содержит датчики продольного (1) и поперечного (2) углов наклона, блоки задания азимута (3) и угла места (4), входы (5) и (6) сигналов соответственно отклонения цели по углу места и азимута цели, блоки вычисления синусов и косинусов углов продольного (7) и поперечного (8) наклонов, заданного азимута (9) и угла места (10), угла места антенны (12), блок формирования угла места антенны (11), сумматор (14), блок формирования азимута линии развертки (13), блок индикатора кругового обзора и вычисления азимута (17), приводы угла места (15) и азимута (16), приводы сопровождения по углу места (18) и азимуту (19).
Передача координат положения цели на приводы сопровождения по углу места (18) и азимуту (19) в виде сигналов, пропорциональных азимуту и углу места цели, производится в стабилизированной системе координат. Устройство построено по принципу косвенной стабилизации луча диаграммы направленности антенны только по углу места с целью измерения отклонения цели от равносигнального направления при одновременном формировании сигнала, пропорционального стабилизированному углу (q) положения луча диаграммы направленности антенны по азимуту в режиме кругового обзора пространства, передачи этого сигнала в блок индикатора кругового обзора и вычисления азимута (17) с целью формирования линии развертки и измерения азимута цели.
Косвенная стабилизация луча диаграммы направленности антенны (20) в угломестной плоскости производится на заданном угле ϕзад с помощью привода угла места (15), отрабатывающего сигнал, пропорциональный углу ϕ . Угол места (ϕ), поворот на который стабилизирует луч диаграммы направленности под углом к горизонту, равным ϕзад , формируется [2] устройством в соответствии с функциональной зависимостью (1):
ϕ = arcsin(sinϕзадcosC/A)-C (1),
где
ϕ - расчетный угол места оси привода антенны,
C = ArctgB/A,
B = cosαsinθ-sinαcosθsinγ,
A = cosθcosγ ,
ϕзад - задаваемый угол места луча диаграммы направленности антенны в стабилизированной системе координат,
θ,γ - углы наклона соответственно продольной и поперечной осей основания,
α - задаваемый угол положения антенны по азимуту (в круговом режиме обзора пространства).
Формирование [1] сигнала, пропорционального расчетному углу ϕ , осуществляется преобразованием сигналов с блоков вычисления синусов и косинусов (7 - 10), углов соответственно продольного ν , поперечного (γ) наклонов, заданных азимута α и угла места ϕзад посредством блока формирования угла места антенны (11), реализующего зависимость (1).
Вращение антенны (20) по азимуту осуществляется приводом азимута (16) при отработке им сигнала, поступающего на его вход непосредственно с выхода блока задания блока задания азимута (3) и пропорционального задаваемому азимуту α .
Стабилизация линии развертки азимутального положения луча диаграммы направленности антенны на индикаторе кругового обзора осуществляется с помощью управляющего сигнала q, который формируется [2] устройством в соответствии с зависимостью (2):
q = arcsin[(sinγsinϕ+cosγsinαcosϕ)/cosϕзад] (2)
Формирование управляющего сигнала q, пропорционального расчетному углу q, осуществляется преобразованием сигналов с блоков вычисления синусов и косинусов (8, 9, 10, 12) углов соответственно поперечного наклона γ , заданных азимута α и угла места ϕзад , угла места ϕ антенны посредством блока формирования азимута линии развертки (13), реализующего зависимость (2).
Развертка формируется блоком индикатора кругового обзора и вычисления азимута на индикаторе кругового обзора РЛСО [3]. Луч диаграммы направленности антенны совместно с линией кругового обзора образуют измерительную линию визирования (ЛВ) РЛСО в стабилизированной системе координат, с помощью которой в блоке индикатора кругового обзора и вычисления азимута (17) РЛСО производится измерение азимута (q) цели [4] (в качестве азимута цели принимается азимут развертки в момент прохождения плоскости симметрии диаграммы направленности антенны через цель). Входом привода сопровождения по азимуту (19) является вход (6) сигнала азимута цели. В качестве угломестной координаты цели на вход привода сопровождения по углу места (18) подается сигнал, пропорциональный сумме (ϕзад+Δϕзад) задаваемого угла места и отклонения цели по углу места, с выхода сумматора (14) при подключении его первым входом к выходу блока (4) задания угла места, вторым входом сумматора является вход (5) сигнала отклонения цели по углу места. Приводы слежения по углу места (18) и азимуту (19), отрабатывая сформированные сигналы, устанавливают антенну (21) в направление на цель.
Прототипом в части управления положением луча диаграммы направленности антенны в пространстве является РЛС с двумя степенями свободы (двухприводная). В такой РЛС косвенная стабилизация не устраняет наклонов перекрестия визира при наклонах основания.
Недостатком прототипа является то, что наклон перекрестия (система пересекающихся двух линий, образующихся следом пересечения плоскости симметрии диаграммы направленности антенны и плоскости, перпендикулярной к ней, и проходящих через луч и лежащих в плоскости наблюдения цели (плоскость, содержащая цель и перпендикулярная лучу), приводит к тому, что при смещении цели от центра перекрестия азимут (q) цели отличается от азимута линии развертки положения луча диаграммы направленности в момент "накрывания" цели плоскостью симметрии диаграммы направленности при вращении антенны по азимуту в режиме кругового обзора. В результате устройство управления положением диаграммы направленности антенны прототипа формирует координаты целеуказания - азимут (q0) и угол места ϕo с методической погрешностью, обусловленной неполной стабилизацией положения диаграммы направленности (отсутствует стабилизация положения перекрестия). Так, при продольном и поперечном наклонах порядка 7 градусов и смещении цели относительно центра перекрестия порядка 6 градусов погрешность формирования азимутальной координаты составляет порядка 1,5 градусов.
Вышеупомянутый недостаток прототипа из-за недопустимо больших погрешностей формирования координат целеуказания усложняет устройство допоиска и захвата цели станцией сопровождения цели (ССЦ) и увеличивает время перехода на сопровождение цели, что, в конечном итоге, делает невозможным применение устройства в мобильных РЛС обнаружения с малым работным временем.
Таким образом, целью изобретения является повышение точности формирования координат цели за счет введения компенсирующих поправок, электрической стабилизации положения плоскости симметрии диаграммы направленности антенны (перекрестия визира).
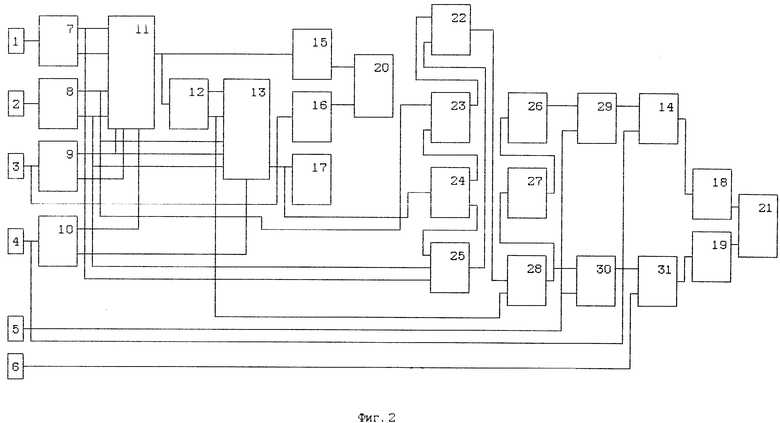
Функциональная схема предлагаемого устройства приведена на фиг.2. Поставленная цель достигается тем, что в устройстве управления положением диаграммы направленности антенны мобильной РЛСО, основанном на косвенной стабилизации антенны обнаружения (20) по углу места и линии развертки индикатора кругового обзора по азимуту, содержащем датчики продольного (1) и поперечного (2) углов наклона, блок задания угла места (4) с последовательно подключенными блоками вычисления синусов и косинусов углов соответственно продольного (7) и поперечного (8) наклонов, заданного угла места (10), блок задания азимута (3) с подключенными к его выходу своим входом приводом азимута (16) и блоком вычисления синуса и косинуса заданного азимута (9), синусный и косинусный выходы блоков вычисления синусов и косинусов углов соответственно продольного (7) и поперечного наклонов (8) заданного азимута (9), синусный выход блока вычисления синуса и косинуса заданного угла места (10) с подключенным к ним своими входами блоком формирования угла места антенны (11) с выходом и с подключенными к нему своими входами блоком вычисления синуса и косинуса угла места антенны (12) и приводом угла места (15), синусный и косинусный выходы блоков вычисления синусов, косинусов углов соответственно поперечного наклона (8), угла места антенны (12), синусный выход и косинусный выход блоков соответственно вычисления синуса и косинуса заданного азимута (9) и заданного угла места (10), с подключенным к ним своими входами блоком формирования азимута линии развертки (13) с выходом и с подключенным к нему своим входом блоком индикатора кругового обзора и вычисления азимута (17), выходы привода угла места (15) и азимута (16), подключенные к антенне обнаружения (20), сумматор (14) с первым входом, подключенным к выходу блока задания угла места (4), с вторым входом, являющимся входом устройства (5) сигнала отклонения цели по углу места, с выходом и с подключенным к нему своим входом приводом сопровождения по углу места (18), привод сопровождения по азимуту (19) с входом, являющимся входом (6) сигнала азимута цели, выходы приводов сопровождения по углу места (18) и азимуту (19), являющиеся выходами устройства и подключенные к антенне сопровождения (21), дополнительно включено пять блоков умножения (23, 25, 28, 29, 30), блок вычисления синуса и косинуса азимута линии развертки (24), блок вычисления косинуса (26), блок вычисления арксинуса (27), второй (22) и третий (31) сумматоры, причем первый и второй входы первого сумматора (14) подключены соответственно к выходу блока задания угла места (4) и выходу четвертого блока умножения (29), а вход привода сопровождения по азимуту (19) подключен к выходу третьего сумматора (31), первый вход которого подключен к входу (6) сигнала азимута цели, а второй вход подключен к выходу пятого блока умножения (30), четвертый (29) и пятый (30) блоки умножения первыми входами подключены к входу (5) сигнала, отклонения цели по углу места, а вторыми входами к выходам соответственно блока вычисления косинуса (26) и третьего блока умножения (28), выход третьего блока умножения (28) подключен к входу блока вычисления арксинуса (27), выход которого, в свою очередь, подключен к входу блока вычисления косинуса (26), первый и второй входы третьего блока умножения (28) подключены соответственно к выходу второго сумматора (22) и к косинусному выходу блока вычисления синуса и косинуса угла места антенны (12), первый и второй входы второго сумматора подключены к выходам соответственно первого (23) и второго (25) блоков умножения, первый и второй входы первого блока умножения (23) подключены соответственно к синусному выходу блока (8) вычисления синуса и косинуса угла поперечного наклона и к косинусному выходу блока (24) вычисления синуса и косинуса азимута линии развертки, а первый, второй, третий входы второго блока (25) умножения подключены соответственно к косинусному выходу блока (8) вычисления синуса и косинуса угла поперечного наклона и синусным выходам блоков вычисления синусов и косинусов соответственно азимуту линии развертки и угла продольного наклона, вход блока вычисления синуса и косинуса азимута линии развертки (24) подключен к выходу блока формирования азимута линии развертки (13).
Авторами выявлено применение блоков, из которых состоит устройство, в различных областях техники. Однако их совокупное применение и взаимосвязи в предлагаемом устройстве позволяют получить новое качество устройства управления положением диаграммы направленности антенны мобильной РЛС обнаружения цели, заключающееся в точной стабилизации диаграммы направленности в пространстве при продольных и поперечных наклонах подвижного основания. Следовательно, техническое решение соответствует критерию "изобретательский уровень".
На фиг. 1 представлена функциональная схема прототипа в упрощенном виде (выписка из технического описания ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА 2С6М. Техническое описание 2С6М 0000000ТО [1]).
На фиг. 2 приведена функциональная схема заявляемого устройства, где
1 и 2 - датчики соответственно продольного и поперечного углов наклонов;
3 и 4 - блоки задания соответственно азимута и угла места;
5 и 6 - входы сигналов соответственно отклонения цели по углу места и азимута цели;
7, 8, 9, 10, 12, 24 - блоки вычисления синусов и косинусов углов соответственно продольного и поперечного наклонов, заданного азимута и угла места, угла места привода, азимута линии развертки;
11 и 13 - блоки формирования соответственно угла места антенны и азимута линии развертки;
14, 22, 31 - сумматоры - соответственно первый, второй и третий;
15 и 16 - привод угла места и азимута;
17 - блок индикатора кругового обзора и вычисления азимута;
19 и 19 - приводы сопровождения по углу места и азимуту;
20 - антенна обнаружения;
21 - антенна сопровождения;
23, 25, 28, 29, 30 - блоки умножения - соответственно первый, второй, третий, четвертый и пятый;
26 - блок вычисления косинуса;
27 - блок вычисления арксинуса;
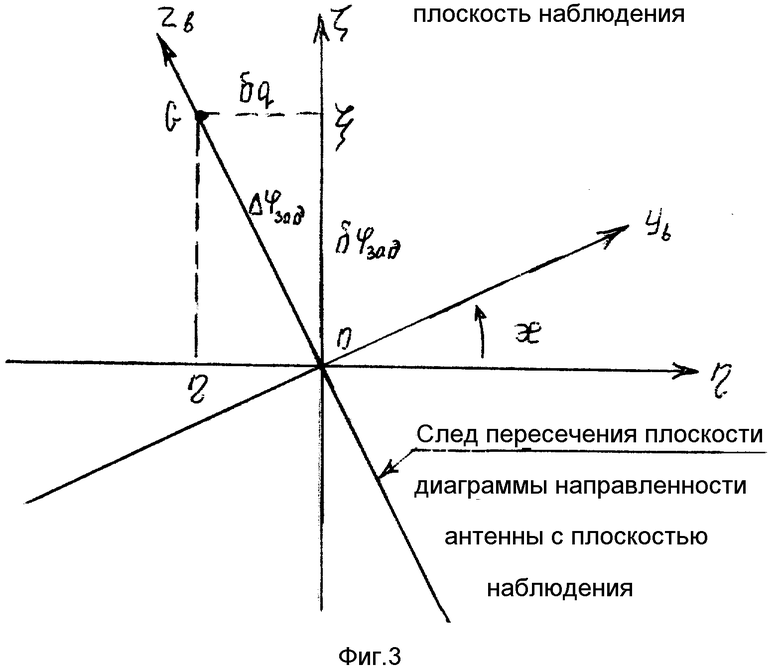
На фиг. 3 представлены системы координат, в которых стабилизируется антенна РЛСО и управляется антенна сопровождения, где приняты следующие обозначения:
ZOY - система координат визира СОЦ,
Oη - система координат визира ССЦ,
OG - координата, пропорциональная угловому отклонению цели от равносигнального направления антенны (центра перекрестия),
κ - угол наклона перекрестия (диаграммы направленности антенны),
Oζ, Oη - координаты, пропорциональные угловым поправкам соответственно по углу места и по азимуту.
Устройство работает следующим образом. В процессе эволюции основания, на котором установлена антенна обнаружения, возникающие при этом продольные и поперечные отклонения от установившегося состояния меняют положение диаграммы направленности в пространстве. Для возвращения луча диаграммы направленности антенны и развертки индикатора кругового обзора в прежнее положение с целью измерения координат цели в стабилизированной системе координат формируют сигналы, пропорциональные углам продольного и поперечного наклонов основания, соответственно в виде угла поворота антенны относительно заданного угла места и угла поворота развертки индикатора кругового обзора по азимуту относительно текущего заданного значения азимута, а для исключения влияния наклона плоскости диаграммы направленности (перекрестия) на точность наведения антенны сопровождения на цель - сигналы поправок к углам положения цели относительно положения луча диаграммы направленности антенны. Вычисление компенсирующих поправок определяется, исходя из рисунка, представленного на фиг. 3. Взаимное положение осей ζOη и ZOY определяется [5] с помощью угла κ, определяемого в соответствии с зависимостью (3):
κ = arcsin[(sinqsinθcosγ+cosqsinγ)/cosϕ] (3)
При определении поправок полагается, что луч диаграммы направленности антенны совмещен с положением, когда плоскость симметрии диаграммы направленности антенны проходит через цель G и угол места луча соответствует заданному ϕзад , а цель G смещена относительно центра перекрестия на величину Δϕзад . Из фиг.3 видно, что поправка δq в азимуте может быть определена в виде зависимости:
δq= Δϕзадsinκ (4)
поправка δϕ в угле места - в виде зависимости:
δϕ = Δϕзадcosκ (5)
С учетом этих поправок могут быть вычислены точные координаты цели G для азимута и угла места в виде зависимостей соответственно:
С этой целью сигналы с датчиков продольного (1) и поперечного (2) наклона, блока задания азимута (3) и угла места (4) подаются на блоки вычисления синусов и косинусов (7, 8, 9, 10) углов соответственно продольного и поперечного наклонов, заданного азимута и угла места, на выходе которых снимаются сигналы, пропорциональные синусам и косинусам этих углов. Сигналы с выходов этих блоков подаются на входы блока формирования угла места антенны, с помощью которого реализуется зависимость (1) и на выходе которого снимается сигнал, пропорциональный углу, определяющему стабилизированное положение антенны для текущих углов наклонов основания и заданных углов места и азимута. Сигнал с выхода блока формирования угла места поступает на вход блока вычисления синуса и косинуса этого угла. Сигналы, пропорциональные синусу и косинусу с выхода этого блока, блока вычисления синуса и косинуса угла поперечного наклона, с синусного выхода и с косинусного выхода блоков соответственно вычисления синуса и косинуса заданного азимута и заданного угла места поступают на входы блока формирования азимута линии развертки, с помощью которого реализуется зависимость (2) и на выходе которого снимается сигнал, пропорциональный углу, определяющему стабилизированное положение линии развертки индикатора круговой развертки для текущих углов наклона основания и заданных углов места и азимута. Сигнал с выхода блока формирования угла места антенны подается на привод угла места, который, поворачивая антенну, стабилизирует положение луча диаграммы направленности антенны по углу места. Сигнал с выхода блока формирования азимута линии развертки подается на схему управления положением развертки блока индикатора кругового обзора и вычисления азимута, под действием которого стабилизируется развертка индикатора кругового обзора (положение луча диаграммы направленности антенны по азимуту). Сигнал с выхода блока формирования азимута линии развертки (13) поступает на блок (24) вычисления синуса и косинуса азимута линии развертки. Сигналы, пропорциональные синусу угла наклона поперечной оси основания с синусного выхода, косинусу азимута линии развертки с косинусного выхода блоков (8) и (24) вычисления синуса и косинуса этих углов, поступают на входы первого блока умножения (23), а сигналы с косинусного, синусного выхода тех же блоков и синусного выхода с блока вычисления синуса и косинуса продольного угла наклона (7) - на входы второго блока умножения (25), в которых вычисляются произведения соответственно L = cosqsinγ и M = sinqsinνcosγ. Сигналы с выходов первого и второго блоков умножения (23) и (25) подаются на входы сумматора (22), на выходе которого получают сигнал, пропорциональный сумме N = cosqsinγ+sinqsinνcosγ . Сигнал, пропорциональный этой сумме, и сигнал с выхода блока вычисления косинуса угла места антенны (12) подаются на первый и второй входы третьего блока умножения (28), осуществляющего операцию: (cosqsinγ+sinqsinθcosγ)/cosϕ. Сигнал с выхода этого блока подается в блок вычисления арксинуса (27), выход которого соединен с входом блока вычисления косинуса (26). Сигналы, пропорциональные синусу и косинусу угла наклона перекрестия, с выходов соответственно третьего блока умножения (28), блока вычисления косинуса (26) и сигнал входа (5) отклонения цели по углу места поступают соответственно на первый и второй входы соответственно пятого (30) и четвертого (29) блоков умножения, в которых вычисляются произведения соответственно:
δq= Δϕзадsinκ и δϕ = Δϕзадcosκ
Сигналы с выходов четвертого блока умножения (29) и блока задания угла места (4) поступают на первый сумматор (14), а сигналы с выхода пятого блока умножения (30) и входа (6) азимута цели - на третий сумматор (31), на выходе которых получают сигналы, пропорциональные соответственно точным углу места и азимуту цели, определяемым в соответствии с зависимостями (6). Сигналы с выходов первого (14) и третьего (31) сумматоров поступают на входы соответственно привода сопровождения по углу места (18) и по азимуту (19), которые осуществляют разворот антенны сопровождения (21) и точное совмещение ее линии визирования с целью, в результате чего осуществляется полная стабилизация линии визирования мобильной РЛС обнаружения при наклонах основания, на котором она установлена.
Для выполнения заявляемой системы могут быть использованы серийно выпускаемые элементы автоматики и вычислительной техники. В качестве датчиков 1, 2, 3, 4 могут использоваться потенциометрические датчики с неорганическим углом поворота с линейной зависимостью преобразования угла в напряжении [6] или синусно-косинусные вращающиеся трансформаторы (СКВТ) [7]. Блоки 7, 8, 9, 10, 12, 24, 26 вычисления синусов и косинусов, блок 27 вычисления арксинуса, сумматоры 14, 22, 31, блоки умножения 23, 25, 28, 29, 30, блоки формирования угла места антенны 11 и азимута линии развертки 13 могут быть реализованы на типовых схемах устройств соответственно вычисления синуса, косинуса, арксинуса, сумматора, перемножителя, построенных на прецизионных аналоговых микросхемах [8] , [9] или на СКВТ [6]. Приводы строятся по принципу следящего привода [10] и могут быть реализованы на серийно выпускаемых элементах автоматики и электроники [11] . В аналого-цифровом варианте исполнения устройства в качестве датчиков 1, 2, 3, 4 могут использоваться цифровые датчики угла с индуктосином типа ВАЛ-КОД, блоки 7, 8, 9, 10, 12, 24, 26 вычисления синусов, косинусов, блок 27 вычисления арксинусов, блоки 23, 25, 28, 29, 30 умножения, сумматоры 14, 22, 31 совместно с управляющей частью приводов 15, 16, 18, 19, могут быть реализованы программно с использованием микропроцессорной ЭВМ [12], [13]. Исполнительная часть приводов аналоговая и может быть реализована в соответствии с изложенным в литературе [14].
Использование изобретения позволит повысить точность стабилизации углового положения луча диаграммы направленности антенны мобильной РЛСО за счет компенсации ошибок формирования координат целеуказания, вызываемых наклонами перекрестия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2231820C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2220436C2 |
| Устройство управления положением диаграммы направленности антенны подвижного объекта | 1990 |
|
SU1805451A1 |
| Устройство для отображения пространственного положения цели на экране индикатора | 1980 |
|
SU963076A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Устройство для формирования азимутальной развертки | 1976 |
|
SU594470A1 |
| Цифровой преобразователь системы координат | 1977 |
|
SU656195A1 |
| Формирователь кодов радиально-круговой развертки для индикатора кругового обзора | 1982 |
|
SU1030751A1 |
Изобретение относится к устройствам управления и стабилизации измерительных устройств на качающемся основании и может быть использовано для управления лучом антенны мобильной РЛС обнаружения. Целью изобретения является повышение точности формирования координат целеуказания за счет введения компенсирующих поправок, электрической стабилизации положения плоскости симметрии диаграммы направленности антенны (перекрестия визира). Повышение точности целеуказания достигается за счет того, что в устройство управления, содержащее датчики продольного и поперечного углов наклона, блоки задания угла места, азимута, блоки вычисления синуса и косинуса углов соответственно продольного и поперечного наклонов, задания азимута и угла места, угла места антенны, блоки формирования угла места антенны и азимута линии развертки, блок индикатора кругового обзора и вычисления азимута, сумматор, приводы угла места и азимута с выходами, подключенными к антенне обнаружения, входы сигналов отклонения цели по углу места и азимута цели, приводы сопровождения по углу места и по азимуту с выходами, являющимися выходами устройства и подключенными к антенне сопровождения, включено пять блоков умножения, блок вычисления синуса и косинуса угла азимута линии развертки, блок вычисления арксинуса, второй и третий сумматоры. 3 ил.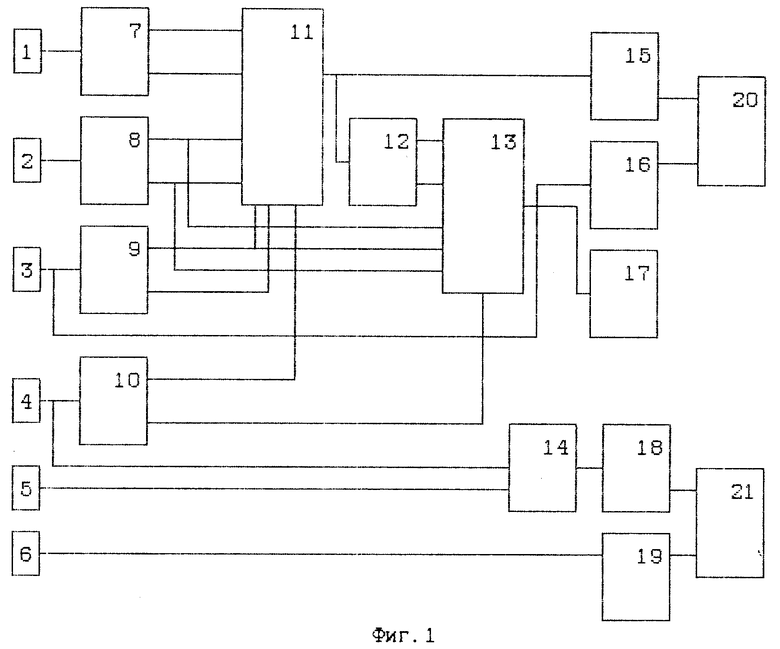
Устройство управления положением диаграммы направленности антенны мобильной РЛС обнаружения, содержащее датчики продольного и поперечного углов наклона, блок задания угла места с последовательно подключенными блоками вычисления синусов и косинусов углов соответственно продольного и поперечного наклонов, заданного угла места, блок задания азимута с подключенным к его выходу приводом азимута и блоком вычисления синуса и косинуса заданного азимута, синусный и косинусный выходы блоков вычисления синусов и косинусов углов соответственно продольного и поперечного наклонов, заданного азимута, синусный выход блока вычисления синуса и косинуса заданного угла места с подключенным к ним своими входами блоком формирования угла места антенны с выходом и с подключенными к нему своими входами блоком вычисления синуса и косинуса угла места антенны и приводом угла места, синусный и косинусный выходы блоков вычисления синусов, косинусов углов соответственно поперечного наклона, угла места антенны, синусный выход и косинусный выход соответственно блоков вычисления синуса и косинуса углов заданного азимута и заданного угла места с подключенным к ним своими входами блоком формирования азимута линии развертки с выходом и с подключенным к нему своим входом блоком индикатора кругового обзора и вычисления азимута, выходы привода угла места и азимута, подключенные к антенне обнаружения, первый сумматор с первым входом, подключенным к выходу блока задания угла места, и вторым входом, являющимся входом сигнала отклонения цели по углу места, с выходом, подключенным к входу привода сопровождения по углу места, привод сопровождения по азимуту с входом, являющимся входом сигнала азимута цели, выходы приводов сопровождения по углу места и по азимуту, являющиеся выходами устройства и подключенные к антенне сопровождения, отличающееся тем, что в него включено пять блоков умножения, блок вычисления синуса и косинуса азимута линии развертки, блок вычисления косинуса, блок вычисления арксинуса, второй и третий сумматоры, причем второй вход первого сумматора подключен к выходу четвертого блока умножения, а вход привода сопровождения по азимуту подключен к выходу третьего сумматора, первый вход которого подключен к входу сигнала азимута цели, а второй вход - к выходу пятого блока умножения, четвертый и пятый блоки умножения первыми входами подключены к входу сигнала отклонения цели по углу места, а вторыми входами - к выходам соответственно блока вычисления косинуса и третьего блока умножения, выход третьего блока умножения подключен к входу блока вычисления арксинуса, выход которого подключен к входу блока вычисления косинуса, первый и второй входы третьего блока умножения подключены соответственно к выходу второго сумматора и к косинусному выходу блока вычисления синуса и косинуса угла места антенны, первый и второй входы второго сумматора подключены к выходам соответственно первого и второго блоков умножения, первый и второй входы первого блока умножения подключены соответственно к синусному выходу блока вычисления синуса и косинуса угла поперечного наклона и к косинусному выходу блока вычисления синуса и косинуса азимута линии развертки, а первый, второй и третий входы второго блока умножения подключены соответственно к косинусному выходу блока вычисления синуса и косинуса угла поперечного наклона и синусным выходам блоков вычисления синусов и косинусов соответственно азимута линии развертки и угла продольного наклона, вход блока вычисления синуса и косинуса азимута линии развертки подключен к выходу блока формирования азимута линии развертки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Воентехиниздат, изд | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1805451, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Справочник по основам радиолокационной техники | |||
| - М.: Воениздат МО СССР, 1987, с.401 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Романов А.Н | |||
| и др | |||
| Основы автоматизированных систем управления | |||
| - М.: Воениздат МО СССР, 1971, с.83 и 94 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Ривкин С.С | |||
| Стабилизация измерительных устройств на качающемся основании | |||
| - М.: Наука, 1978, с.138 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Гитис Э.И | |||
| Электрорадиоавтоматика | |||
| - М.: Госэнергоиздат, 1958, с.32, 167, 237-250, 277-292 и 310 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Терехов В.М | |||
| Элементы автоматизированного привода | |||
| - М.: Энергоатомиздат, 1987, с.191-199, 179-186, 189-191, 199-203 | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Алексеенко А.Г | |||
| и др | |||
| Применение прецизионных аналоговых микросхем | |||
| - М.: Радио и связь, 1985, с.88, 105-115, 128-133 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Алексеенко А.Г | |||
| и др | |||
| Применение прецизионных аналоговых микросхем | |||
| - М.: Радио и связь, 1980, с.77 и 96 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Башарин А.В | |||
| и др | |||
| Управление электроприводами | |||
| - Л.: Энергоиздат, 1982, с.212, 199-203, 210-216 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Справочник по автоматизированному электроприводу /Под ред В.А.Елисеева и А.В.Шинянского | |||
| - М.: Энергоатомиздат, 1983, с.330-336, 344-352 | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Ушкар М.Н | |||
| МИкропроцессорные устройства в радиоэлектронной аппаратуре | |||
| - М.: Радио и связь, 1988 | |||
| Насос | 1917 |
|
SU13A1 |
| Гориловский А.А | |||
| и др | |||
| Опыт применения цифровых процессоров обработки сигналов для управления электроприводом | |||
| - Л.: ЛДНТП, 1988 | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Беленький Ю.М | |||
| и др | |||
| Опыт разработки и применения бесконтактных моментных приводов | |||
| - Л | |||
| ЛДНТП, 1987. | |||

