3
кой схемы (fianpitMej) с чоложптсльпым 1отеициа;10л источника питания), расно.южсн на внутренней стороне тн.тьзы ггротеза ;итя обеспечения постоянного контакта с новерхностью культи инвалида. Электроды 1, 2 расположены на нльзе иротеза в иределах досятаемости руднмепта.тьного отростка. Прикосновенне носледнего к злектрода.м 1 или 2 приводит к появлепню но;юж гге.тьного нотенциала на входах амплитудных дискриминаторов 5 или 6 соответственно, что, в свою очере.ть, вызывает срабатывание одного из пнх. Срабатывание а.мнлитудного диекримпиатора 5 и;и 6 приводит к появлению на его выходе прямоугольного нмнульса, длнтельность которого находится в нрямой завнсимостн от продолжительности еоприкосповення рудиментарного отростка с одним пз электродов 1 или 2. С выхода амнл1ггудног(; дискриминатора 5 пли 6 импульс ноступает па блок 7 коммутации цепи питания электромеханического привода 4 протеза, в результате чего происходит срабатывание блока 7 коммутации и подключепие привода 4 к источнику питания в той или ипой полярности, вызывая движение, например, нальцев искусственной кнстц протеза предплечья с одной нарой управляемых движений. Реверспровапие движепия привода 4 ос ществляеТСя аналогичным образом при соприкосповепни рудиментарного отростка с другим электродом.
Предложенное устройство дает большой функциональный эффект, связанный с получением возможности инвалидам, имеющим подвижные рудиментарные отростки верхних конечностей, уцравлять протезом, снизив при этом исихофизиолоФорм у л а л 3 о б р с т е и и я
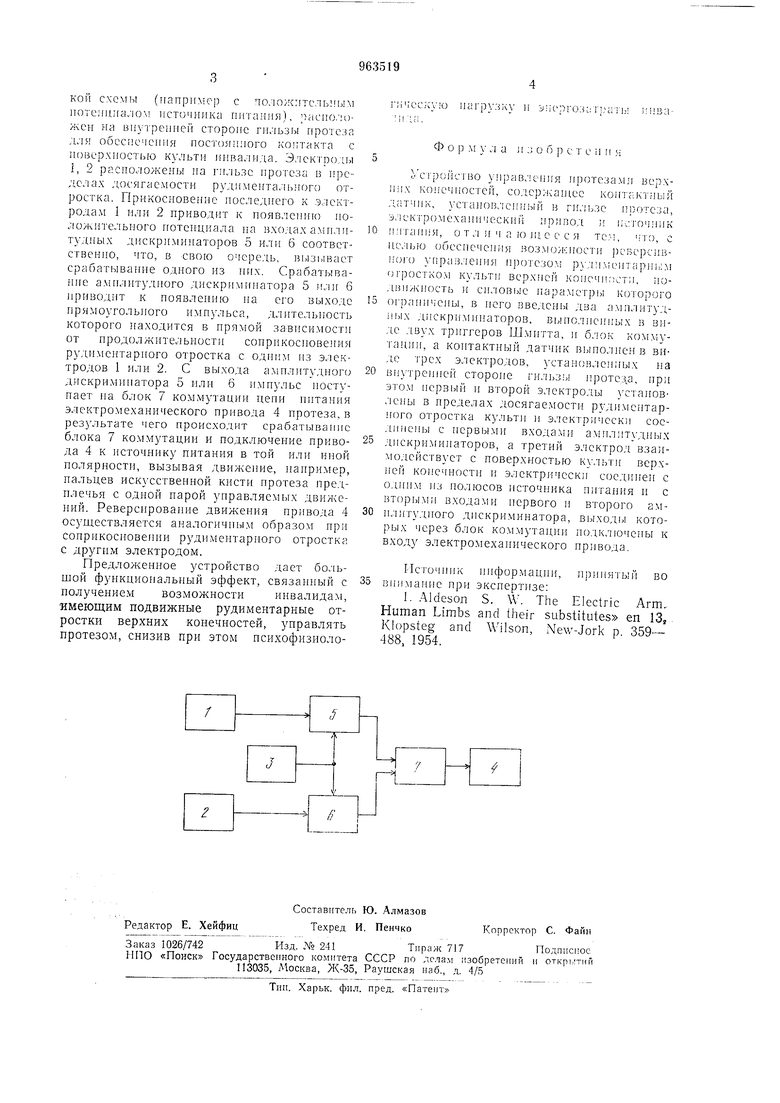
остройство уирав.чения протезами верхних коиечностей, содержан1,ее контактный датчик, устаиов;1ен 1ый в нр-отеза, электромеханический нрипод ;i i;cT04iiHK и.ггания, о т л н ч а ю ju е е с я тем, тго, с нелью обеснечепня возможности ))еверснвiioio у 1ра15,1еиия протезом рудил;е11та) пгростком культи верхней коисчи; оти, нодви/ иость и снлов1)е иараметр) которого ограннчеиы, в него введены два амплитудных дискриминаторов, вынолпеииых в виде двух триггеров Шмнтта, н блок коммутацнн, а контактный датчик вынолненв виде трех электродов, установленных на внутренней стороне гильзы протеза, при этом нервы и н второй электроды }тта1 ОВ .тены в пределах доеягае.моетн рудиментарного отроетка культи и электрически соединены с первыми входами амилнтудных днскриминаторов, а третий электрод взаимодействует е новерхностью культи верхней коиечностн и электрически соединен с одннм 113 полюсов источника питания н с вторыми входами нервого и второго амил1гтудиого дискриминатора, выходы которых через блок коммутации подключены к входу электромеханического нривода.
Г-1еточннк ннформацнн, прииятый во внимание прн экспертизе:
1. Aldeson S. W. The Electric Arm., Human Limbs and iheir substitutes en 13, Klopsteg and Wilson, New-Jork p. 359- 488. 1954.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОТЕЗОМ ПЛЕЧА | 1992 |
|
RU2063194C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОТЕЗОМ РУКИ | 1972 |
|
SU326955A1 |
| Устройство для управления протезами верхних конечностей | 1984 |
|
SU1333332A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475652A1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475653A1 |
ii.
-1.1
