(54) ВЕРТИКАЛЬНО-ПРОТЯЖНОЙ СТАНОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ протяжки длинных изделий, в частности, клинков палашей, и станок для осуществления способа | 1948 |
|
SU82661A1 |
| Непрерывно-протяжной станок | 1982 |
|
SU1115869A1 |
| Станок для протягивания внутренних поверхностей | 1982 |
|
SU1021558A1 |
| ГОРИЗОНТАЛЬНО-ПРОТЯЖНОЙ СТАНОК для ОБРАБОТКИ БНУТРЕННИХ ПОВЕРХНОСТЕЙ | 1967 |
|
SU204104A1 |
| Станок для протягивания внутренних поверхностей | 1985 |
|
SU1340936A1 |
| ВЕРТИКАЛЬНО-ПРОТЯЖНОЙ СТАНОК | 1991 |
|
RU2014179C1 |
| ВЕРТИКАЛЬНО-ПРОТЯЖНОЙ СТАНОК | 1967 |
|
SU224267A1 |
| Протяжной станок | 1990 |
|
SU1785846A1 |
| Вертикально-протяжной станок | 1974 |
|
SU513795A1 |
| Протяжной станок | 1981 |
|
SU1161285A1 |
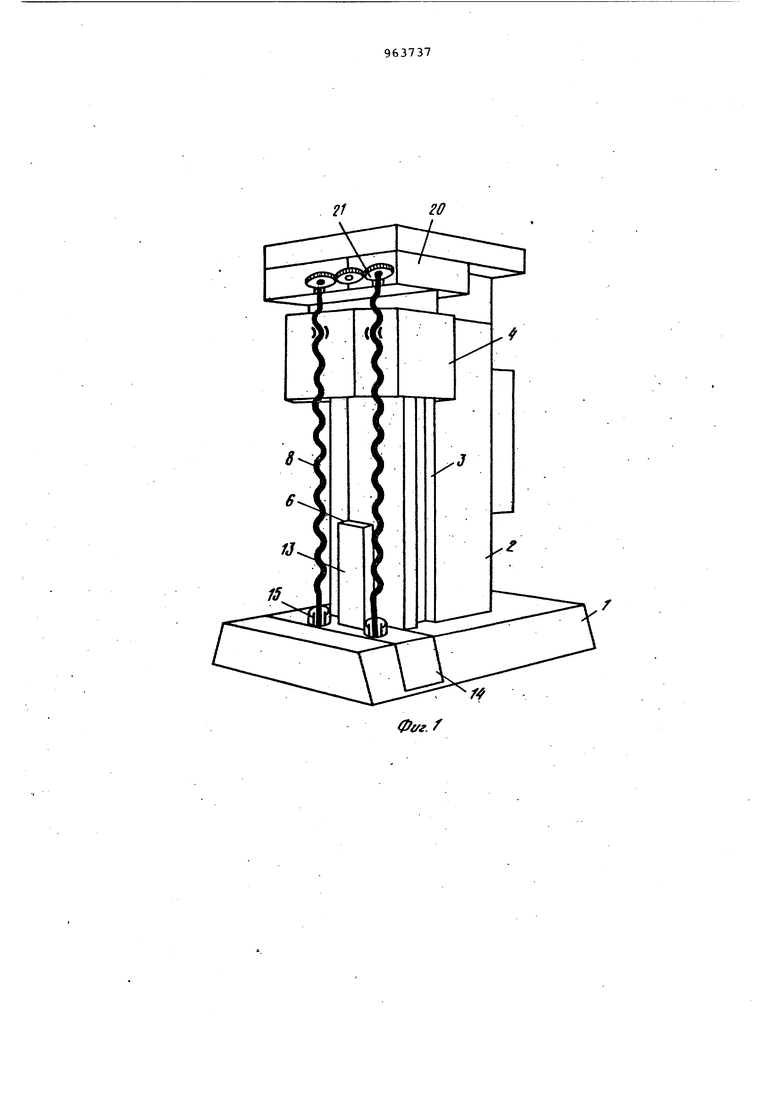
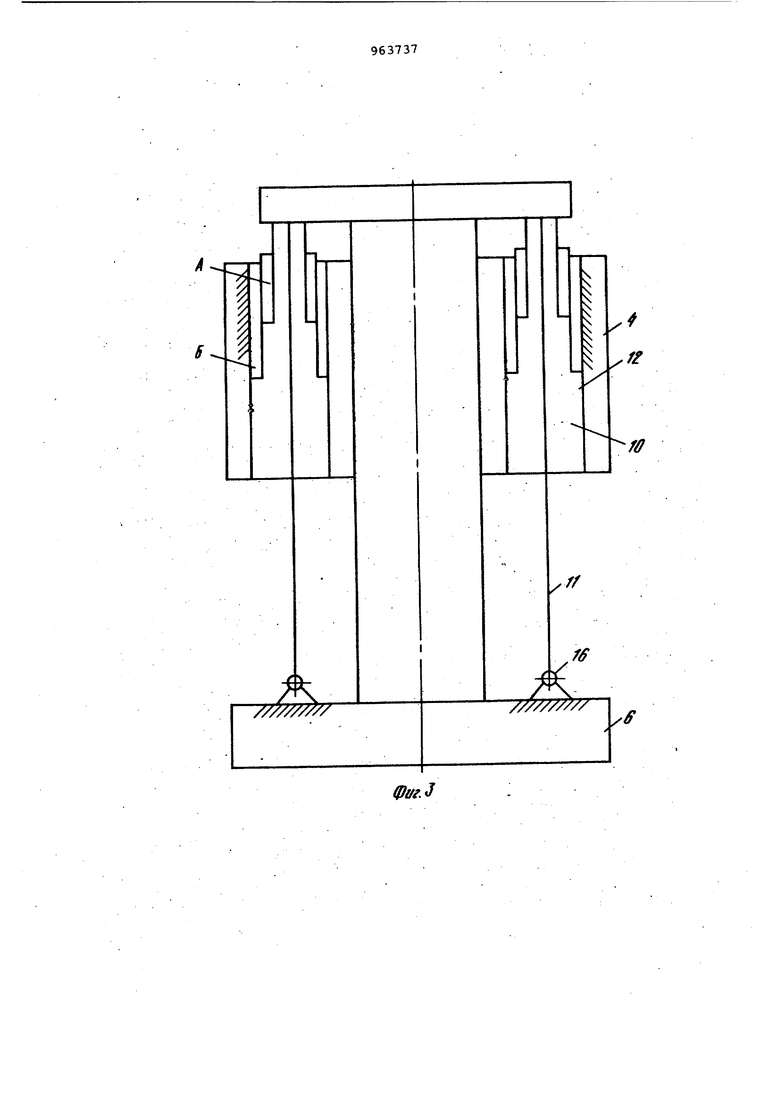
Изобретение относится к станкостроению. Известны вертикально-протяжные станки, содержащие закрепленную на основании станину, в направляюгцих ко торой размещена каретка с протяжками, стол, связанный со станиной, и привод каретки с симметричными отно, сительно стола силовыми механизмами Недостатком известных станков является малая жесткость, вследствие изгиба станины в процессе эксплуатации станка. Дель изобретения - повышение жест кости. Указанная цель достигается тем, что в предложенном станке каретка выполнена в поперечном сечении П-образной с направляющими на боковых сторонах, причем ведущие звенья силовых механизмов закреплены на столе, а центр тяжести каретки лежит в плос кости установки силовых механизмов. На фиг. 1 изображена кинематическая схема вертикально-протяжного станка; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - продольный разрез станка с силовыми механизмами в виде телескопических цилиндров на фиг. 4 - схема замыкания усилий между кареткой и столом в вертикальной плоскости,- на фиг. 5 - то же в горизонтальной плоскости. Вертикально-протяжной станок содержит основание 1 с закрепленной станиной 2, в направляющих 3 которойразмещена каретка 4, несущая протяжки 5 , и связанный с нижней частью станины стол 6 с обрабатываемой деталью 7. Привод, (на черт, не показан) каретки станка включает силовые механизмы, которые могут быть выполйены в виде винтовых передач. Винты 8 передач смонтированы в плоскости действия вертикальных составляющих сил резания симметрично столу 6, а гайки 9 закреплены внутри каретки 4. Винты 8 связаны со столом б. В качестве силовых механизмов могут быть использованы синхронно-действующие телескопические цилиндры 10, штоки 11 которых связаны со столом б, а наружные корпусы 12 соединены с кареткой 4. Стол 6 станка выполнен в поперечном сечении Т-образного профиля, вертикальнрй учабток 13 которого жестко присоединен к станине 2, а поперечный участок 14 не связан с последней
и либо опорами 15 для винтов 8, либо шарнирами 16 для штоков 11.
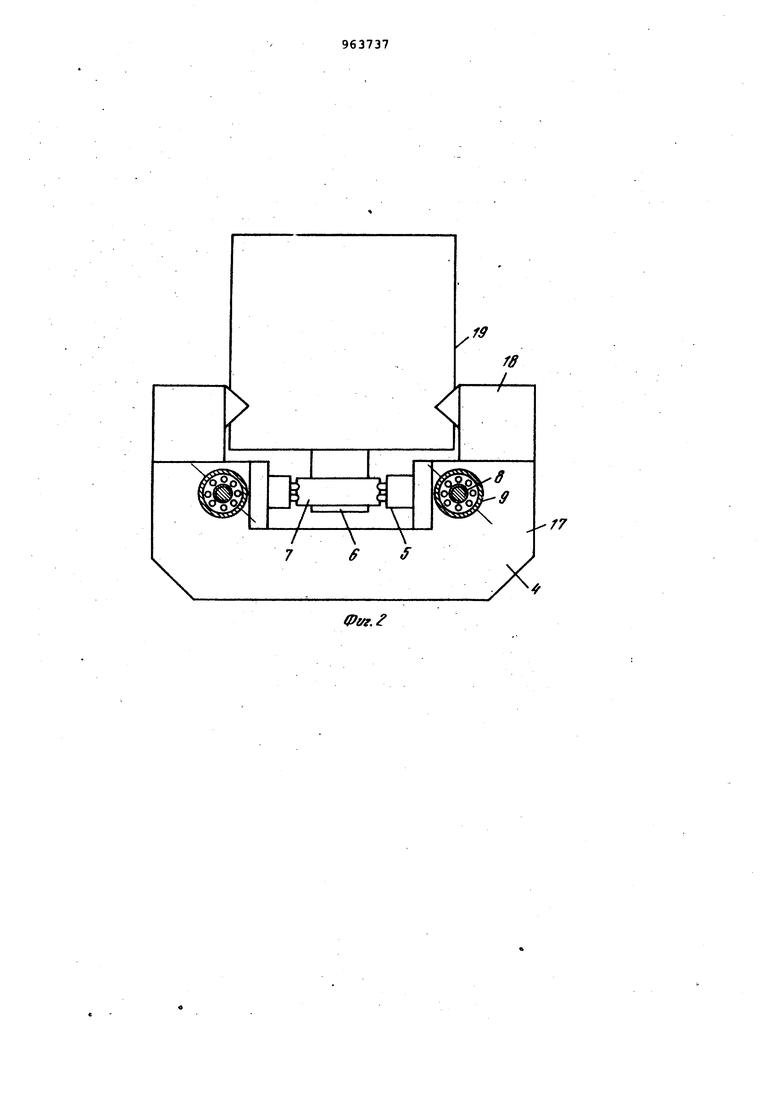
Каретка 4 выполнена в поперечном сечении П-рбразной и установлена с возможностью охватывания стола 6 в крайнем нижнем положении. На боковых сторонах 17 каретки 4 закреплень направляющие планки 18, размещенные в направляющих 3, выполненных на боковых сторонах 19 станины 2.
Центр тяжести каретки 4 лежит в плоскости установки силовых механизмов, совмещенной с плоскостью действия результирующей от вертикальной составляющей силы резания.
В верхней части станины 2 может быть установлен кронштейн 20, в котором смонтированы опоры 21 для винтов 8.
Замыкание усилий резания между кареткой и столом в предлагаемом станке осуществляется следующим образом.,
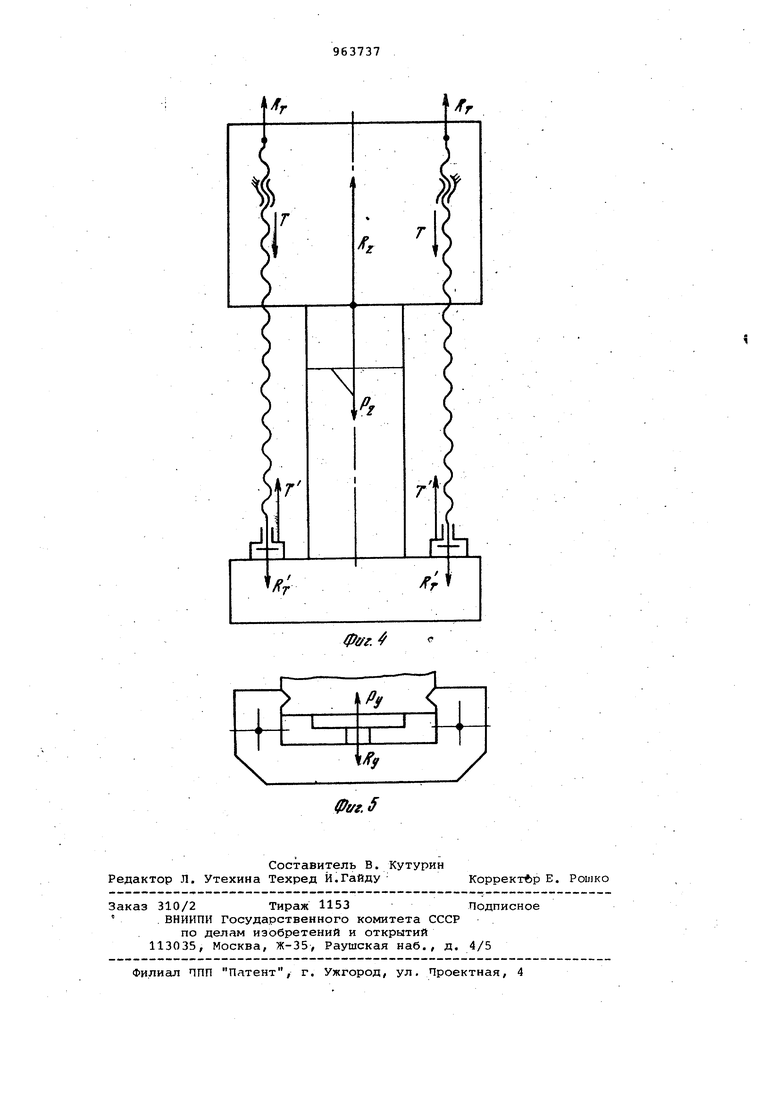
В процессе движения каретки 4 в гайках и винтах 8 возникает равное по величине и противоположно направленное тяговое усилие Т и Т, которое вызывает реакции R -j. и R, соответственно замкнутые вгайках 9 и опорах 15 винтов.
При обработке детали 7 силы резания повышают описанное тяговое усилие , а их вертикальные составляющие Pj и R сжимают вертикальный участок 13 стола, вызывая при этом реакцию в последнем. Поперечный участок 14 стола испытывает воздействие от тягового усилия Т в винтах и вызывает его изгиб в вертикальной плоскости .
Таким образом, вертикальная составляющая от сил резания, тяговые усилия и их реакции воспринимаются вертикальным и поперечным участками 13 и 14 стола, винтами 8 и кареткой 4, при этом все силы не воздействуют на направляющие 3 станка.
В горизонтальной плоскости каретки 4 при обработке детали 7 действует горизонтальная составляющая Р от силы резания, реакция у которой прижимает каретку 4 к направляющим 3 станка.
При использовании в качестве силовых механизмов телескопических цилиндров 10 для обеспечения равенства скоростей при рабочем и холостом ходе каретки их штоковые полости А и Б необходимо выполнять равными по площади в поперечном сечении.
В станке станина и стол выполнены в виде одной консоли, охваченной П-образной кареткой. Такое выполнение обеспечивает замыкание усилий между кареткой и столом в вертикальной плоскости, и между кареткой и направляющими станка в горизонтально плоскости.
Кроме того,-монтаж стола непосредственно Нч1 станине обеспечивает максимально возможное приближение протяжек к плоскости установки направляющих станка.
: Совмещение центра тяжести каретки jc плоскостью установки силовых механизмов исключает какое-либо воздействие усилий от веса каретки на на-. правляющие станка, и при этом вес каретки полностью воспринимается указанными силовыми механизмами.
Это значительно .увеличивает жесткость станка.
Формула изобретения ,
Вертикально-протяжной станок, содержащий закрепленную на основании станину, в направляющих которой размещена каретка с протяжками, стол,
связанный со станиной, и привод каретки с симметрично расположенными относительно стола силовыми механизмами, отличающийся тем, что, с целью повышения жесткости станка, каретка выполнена в поперечнок еечении П-образной с направляющими на боковых сторонах, причем ведущие звенья силовых механизмов закреплены на столе, а центр тяжести каретки лежит в плоскости установки силовых механизмов.
Источники информации, принятые во внимание при экспертизе
7
7ff
/7
X
Фог.
фуг.
