Изобретение относится к металлургии, конкретнее - к .устройствам для дистанционного управления движениями литейного ковша.
Известно устройство для совмещенного управления молотом и манипулятором, содержащее задающие механизмы движения и рукоятку управления 1.
Недостатком известного устройства является низкая производительность и недостаточная точность движений исполнительного механизма.
Цель изобретения - повышение производительности труда и обеспечение точности движений ковша в процессе заливки.
Поставленная цель достигается тем, что блок Зсщающих механизмов манипуляторов , преимущественно для дистанционного управления движениями .питейного ковша, содержащий задающие механизмы манипуляторов, механизмы движения и рукоятку управления, выполнен в виде двух тележек, одна из которых установлена на неподвижных направляющих, а вторая - внутри первой и перпендикулярно ей, полого вертикального шлицевого вала, шарнирно соединенного с рукояткой и снабженного упорными кольцами, расположенньали
на его нижнем конце вала, установленного внутри полого шлицевого вала, имеющего на верхнем конце коническую шестерню, а на нижнем конце - шестерню, и шлицевую втулку с шестерней, размещенной на внутренней тележке, внутри которой размещен полый шлицевой вал, причем все задающие механкзки блока механически связаны с руко10яткой управления, имеющей форму ковша.
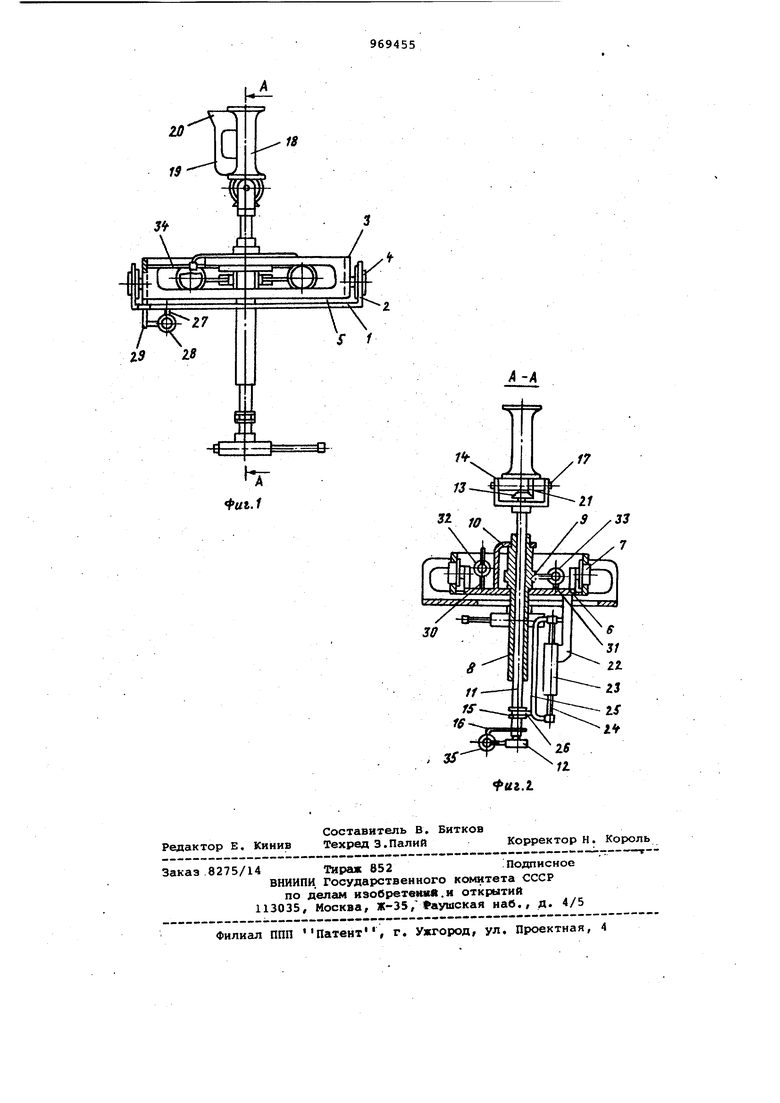
На фиг. 1 изображен блок, общий вид; на фиг. 2 - разрез по А-А на Фиг. 1.
На столе 1 на рельсовых дорожках 2
15 установлена тележка 3 с колесами 4 и рельсовыми дорожками 5. На рельсовых дорожках 5 установлена тележка 6 с колесами 7. На тележке 6 установлена полая втулка 8 с шестерней 9.
20 Кронштейн 10 образует вторую опору для втулки 8, в которой установлен полый шлицеврй вал 11, внутри которого проходит вал с шестерней 12 и конической шестерней 13. Иа верху
25 шлицевого вала 11 закреплена скоба 14, - кольцевые упоры 15 и кронштейн 16. На оси 17 устаиовлана ручка 18 с ребром 19, имитирую:цим заливочный ковш с носком 20. Ручка с реб30 DOM имеет , которая наиболее
удобна для захвата ее одной рукой и производства различных движений. Коническая шестерня 21 входит в за цеплемие с конической шестерней 13. .К тележке 6 при помощи кронштейна. 22 закреплен задающий механизм манипулятора 23 со штоком 24 и скобой 25. Движение скобы и штока осуществляется от движения пшицевого
вала 11 через вилку 26. К столу 1 при помощи кронштейна 27 закреплен задающий механизм манипулятора 28, Движе 1ие скоба и шток получают от
.провода 29, который закреплен на тележке 3 и свободно проходит по прорезу в столе 1. На тележке б на. кронштейнг1Х 30 и 31 закреплены задающие механизмы манипуляторов 32 и 33. Движение скобы и штока механизма 33 осуществляется шестерней 9 через рейку, установленной на скобе. Движение скобы, и штока механизма 32 осуществляется от тяги 34, закрепленной на тележке 3. На кронштейне 16 закреплен задающий механизм манипулятора 35. Движение скобы и штока механизма 35 осуществляется шестерней 12 ч€;рез рейку, установленную на скобе.,
Блок работает следующим образом.
Оператор у пульта управления визуально наблюдает за ковшом и заливаемой формой. Рука оператора охватывает ручку 18. Не глядя на ручку оператор рукою производит те движения, которые необходимы ковшу для : точной установки относительно литниковой чаши и заливки. Все движения ручки 18 одновременно точно повторяются ковшом. Блок обеспечивает все необходимые движения ковша: влевовраво (механизм 28), вперед-назад (механизм 32), вверх-вниз (мезанизм
23), поворот влево-вправо (механизм 33), поворот на заливку и обратно (механизм 35).
Все эти движения механизмов обеспечиваются: продольным и поперечным движениями тележек 3 и б, вертикальным движением шлицевого вала 11,поворотом шестерен 9 и 12.
Формула изобретения
Блок задающих механизмов манипуляторов , преимущественно для дистанционного управления движениями литейного ковша, содержащий задающие механизмы манипуляторов, механизмы движения и рукоятку управления, о т л ичающийся тем, что , с целью повышения производительности труда и
обеспечения точности движений ковша, блок задающих механизмов выполнен в виде двух тележек,одна из которых установлена не неподвижных направляющих, а вторая - внутри первой и перпендикулярно ей,полого вертикального щлицевого вала, цГарнирно соединенного с рукояткой и снабженного упорными кольцами, расположенными на его нижнем конце вала, установленного внутри полого шлицевого вала, имеющего
на верхнем конце коническую шестерню, а на нижнем конце - шестерню, и шлиЦевую втулку с шестерней, размещенной на внутренней тележке, внутри которой размещен полый шлицевой вал,
1ричем все задающие механизмы блока механически связаны с рукояткой уп эавления, имеющей форму ковша.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 180062, кл. В 25 j 13/02, 1963.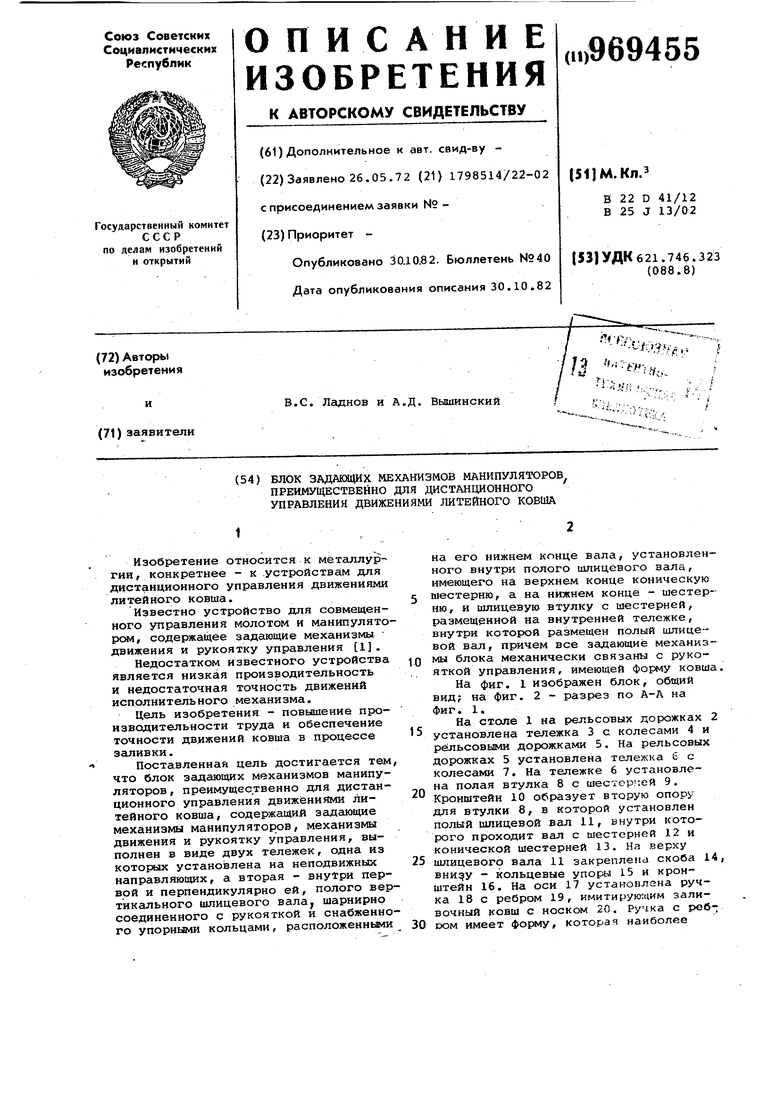
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| КОНСТРУКЦИЯ КАБИНЫ РАЗМЕЩЕНИЯ ПАССАЖИРОВ, ЭКИПАЖА, ОБОРУДОВАНИЯ | 2006 |
|
RU2327607C2 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств. | 2019 |
|
RU2720390C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств | 2019 |
|
RU2720597C1 |
| АППАРАТ ИСКУССТВЕННОГО КРОВООБРАЩЕНИЯ | 1966 |
|
SU177593A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2002 |
|
RU2230683C2 |
| Автоматическая линия кокильного литья | 1966 |
|
SU270202A1 |