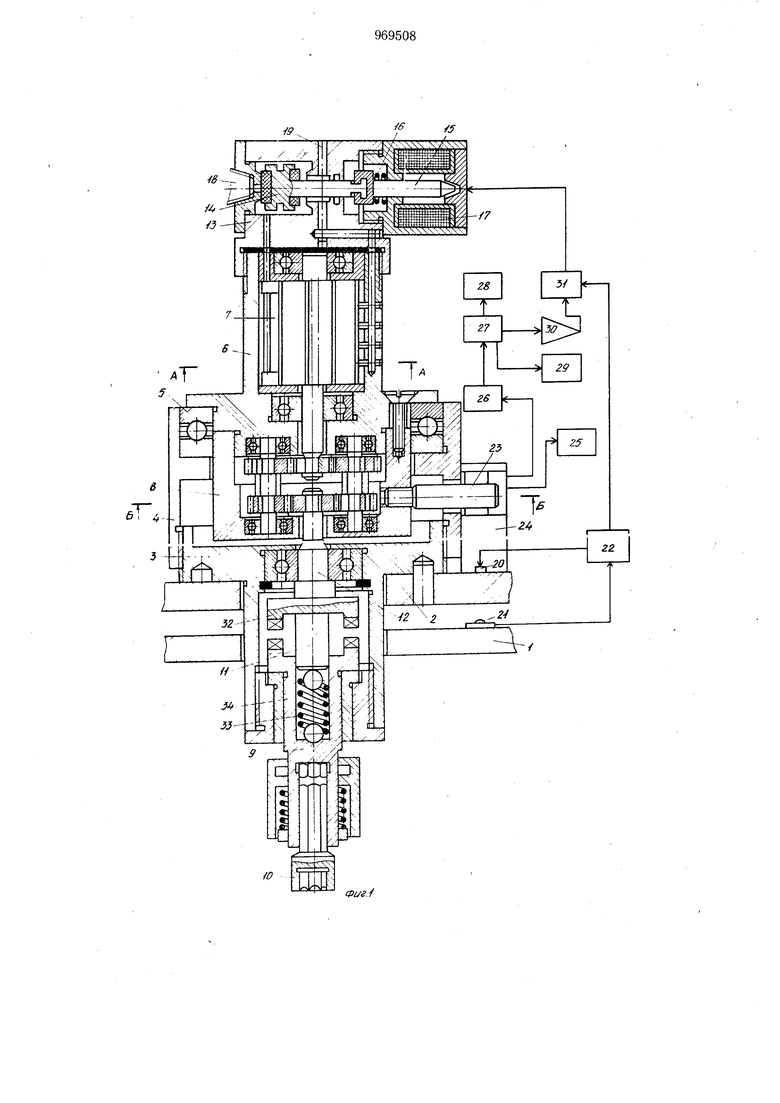
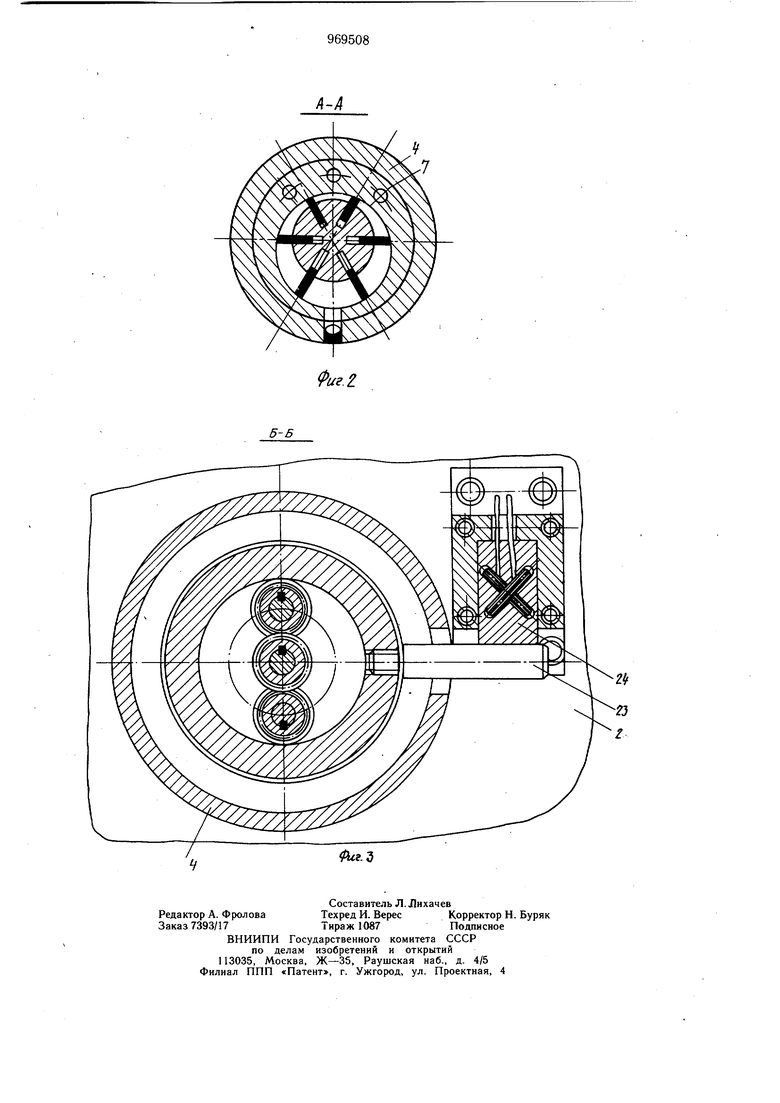
(54) ПНЕВМАТИЧЕСКИЙ ГАЙКОВЕРТ Изобретение относится к машиностроению и может быть использовано в любой отрасли при монтаже и демонтаже резьбовых соединений. Известно устройство для затяжки резьбовых соединений, содержащее установочную плиту, корпус с двигателем, редуктор, полумуфты, одна из которых расположена на выходном валу двигателя, другая - на шпинделе, пружину для создания максималь ного момента затяжки, расположенную между подвижной и неподвижной втулкой, причем в подвижной втулке имеются отверстия, предназначенные для запирания при достижении о феделенного крутящего момента 1. Недостаткам указанного устройства является то, что в процессе сборки резьбового соединения не гарантируется надежность, точность и стабильность затяжки в связи с тем, что нельзя регулировать скорость вращения шпинделя. Кроме Toros при нажатии рабочей головки на тайку резьбового соединения происходит предварительный поджим пружины, что приводит к дополнительной погрешности при определении мо.мента затяжки. Наиболее близким к предлагаемому является пневматический гайковерт, содержащий корпус, размещенные в нем двигатель с редуктором, шпиндель с рабочей головкой, связанный посредством торцовой муфты с выходным валом редуктора 2. Недостаток известного гайковерта заключается в том, что в процессе сборки резьбового соединения не обеспечивается точность затяжки в связи с тем, что нельзя регулировать скорость вращения шпинделя и определять требуемый момент и усилие затяжки. Кроме того, гайковерт нельзя применять для автоматизированной сборки, так как конструкция его очень сложна, что не. позволяет компоновать конструкцию из типовых узлов и деталей. Цель изобретения - повышение точности затяжки резьбового соединения. Поставленная цель достигается тем, что пневматический гайковерт, содержащий корпус, размещенные в нем двигатель с редуктором, шпиндель с рабочей головкой, связанный посредством торцовой муфты с выходным валом редуктора, снабжен вертикальной направляющей, установленной на ней с возможностью перемещения плитой, на которой закрепчр корпус, выполненный в виде стакана, соединенной с ним втулки с шариковой опорой, установленного на последней полого фланца, внутри которого размещен двигатель; пневмоклапаном, установленным на свободном торце фланца, и сообщенным с рабочей полостью двигателя, датчиками перемещения и положения рабочей головки, автоматизированной следящей системой управления, взаимодействующей с последними,и системой ограничения момента затяжки, выполненной в виде магнитострикционного датчика, размещенного на вертикальной направляющей и взаимодействующего с корпусом редуктора, установленного на шариковой опоре и связанного-с магнитострикционным датчиком через упругий элемент, генератора, усилителя формирования сигнала, компаратора, индикатора момента, блока задания момента затяжки, усилителя и логического блока, при этом выход магнитострикционного датчика соединен через усилитель формирования сигнала с компаратором и индикатором момента, блок задания момента затяжки подключен к входу компаратора, выход которого соединен через усилитель и логический блок с пнемоклапаном и автоматизированной следящей системой управления, а подвижная полумуфта торцовой муфты размещена на выходном валу редуктора и подпружинена относительно ее неподвижной полумуфты, соединенной со шпинделем. На фиг. 1 изображен пневматический гайковерт; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 -разрез Б-Б на фиг. I. Пневматический гайковерт содержит вертикальную направляющую 1, установленную на ней с возможностью перемещения плиту 2 на которой закреплен корпус, выполненный в виде стакана 3, соединенной с ним втулки 4 с шариковой опорой 5, установленного на последней полого фланца 6, внутри которого размещен двигатель 7 с редуктором 8, шпиндель 9 с рабочей головкой 10, связанный посредством торцовой муфты 11 с выходным валом 12 редуктора 8. Гайковерт имеет пневмоклапан 13, установленный на свободном торце фланца 6 и сообщенный с рабочей полостью двигателя 7. Пневмоклапан 13 выполнен в виде штока 14, сердечника 15, пружины 16, катушки 17, штуцера 18 для жидкости и отверстия 19 для выброса отработанного воздуха. Гайковергснабжен также датчиками перемещения 20 и положения 21 рабочей головки 10, автоматизированной следящей системой 22 управления, взаимодействующей с последними, и системой ограничения момента затяжки, выполненной в виде магнитострикционного датчика 23, размещенного на вертикальной направляющей 1 и взаимодействующего с корпусом редуктора 8, установленного на шариковой опоре 5 и связанного с магнитострикционным датчиком 23 через упругий элемент 24, генератора 25, усилителя 26 формирования сигнала, компаратора 27, индикатора 28 момента, блока 29 задания момента затяжки, усилителя 30 и логического блока 31, при этом выход магнитострикционного датчика 23 соединен, через усилитель 26 формирования сигнала с компаратором 27 и индикатором 28 момента, блок 29 задания момента затяжки подключен к входу компаратора 27, выход которого соединен через усилитель 30 и логический блок 31 с пневмоклапаном 13 и автоматизированной следящей системой 22 управления, а подвижная полумуфта 32 торцовой муфты 11 размещена на выходном валу 2 редуктора 8 и поджата посредством пружины 33 относительно ее неподвижной полумуфты 34, соединенной со шпинделем 9. Гайковерт работает следующим образом. При помощи автоматизированной следящей системы 22 управления происходит перемещение плиты 2 вместе с корпусом гайковерта, пока головка винта или гайки не войдет в рабочую головку 10, а полумуфта 34, перемещаясь по внутренней поверхности стакана 3, не войдет в зацепление с полумуф той 32, сжимая при этом пружину 33 при помощи штока полу муфты 32, и включит установленные на вертикальной направляющей 1 и плите 2 датчики перемещения 20 и положения 2 головки 10,которые дают команду автоматизированной следящей системе 22 управления на прекращение перемещения плиты 2 с рабочей головкой 10. Затем автоматизированная следящая система управления дает команду логическому блоку 31, который включает пневмоклапан 13, катушка 17 которого втягивает сердечник 15 со штокОдМ 14, сжимая пружину 16 и открывая подачу воздуха через штуцер 18 в рабочую полость пневмодвигателя. Пневмоклапан 13 в зависимости от сигналов, поступающих от логического блока 31, обеспечивает больший или меньший приток воздуха в результате чего увеличивается или уменьшается частота вращения пневмодвигателя 7 и рабочей головки 10,т.е. коммутирует поток воздуха. Воздух из штуцера 18 по каналу попадает в пневмодвигатель 7, приводя его в движение. Вращаясь, пневмодвигатель 7 передает вращение редуктору 8 и полумуфте 32. Вращаясь, полу.муфта 32 вместе с полумуфтой 34 передает вращение головке 10. При вращении и опускании рабочей головки 10 вместе с вертикальной направляющей 1 в процессе затяжки резьбового соединения и при достижении определенного момента затяжки возникает реактивный момент который через головку 10, полумуфты 34 и 32 передает перемещение корпусу редуктора 8, связанного через шариковую опору 5 со втулкой 4 корпуса гайковерта. Перемещаясь,
корпус редуктора 8 через упругий элемент 24 воздействует на магнитострикционный датчик 23, установленный на плите 2. Магнитострикционный датчик имеет первичную и вторичную обмотки, расположенные в сплошном магнитопроводе под углом друг к другу. Питание первичной обмотки магнитострикционного датчика 23 осуществляется от генератора 25. В ненагруженном состоянии силовые линии первичной обмотки датчика 23 располагаются сим.метрично вторичной обмотке, в результате чего ЭДС вторичной обмотки равна О.В результатеперемещения элемента 24 происходит сжатие обмоток магнитострикционного датчика 23, которое свидетельствует о возникновении реактивного момента. В результате этого изменяется магнитная проницаемость материала, магнитное поле вытягивается в направлении большей проницаемости, сжимаясь в направлении меньшей проницаемости, и, сцепляясь со вторичной обмоткой, индицирует в ней электродвижуш.ую силу, пропорциональную приложенному к магнитострикционному датчику 23 усилию, вырабатывая тем самым сигнал, который поступает в усилитель 26 формир Ьвания сигнала. В блоке компаратора 27 происходит сравнение сигналов, поступающих из усилителя 26 и блока 29 задания момента. При совпадении сигналов с выхода компаратора 27 команда через усилитель 30 поступает на логический блок 31, управляющий работой пневмоклапана 13. Одновременно с компаратора 27 выходной сигнал поступает на индикатор 28 момента затяжки, который показывает величину получаемого момента затяжки. При достижении требуемого момента затяжки резьбового соединения происходит срабатывание пневмоклапана, который останавливает пневмодвигатель 7, и выброс воздуха происходит по каналу 19.После остановки двигателя вступает в работу автоматизированная следящая система управления, которая выдает команду на поднятие вертикальной направляющей 1 с рабочей головкой 10, а затем на поднятие плиты 2 с гайковертом и остановку работы всего устройства в целом. После подачи новых деталей на сборку цикл работы повторяется.
Формула изобретения
Пневматический гайковерт, содержащий корпус, размещенные в нем двигатель с рес дуктором, шпиндель с рабочей головкой, связанный посредством торцовой муфты с выходным валом редуктора, отличающийся тем что, с целью повышения точности затяжки резьбового соединения, он снабжен вертикальной направляющей, установленной на
0 ней с возможностью перемещения плитой, на которо.й закреплен корпус, выполненный в виде стакана, соединенной с ним втулки с шариковой опорой, установленного на последней полого фланца, внутри которого размещен двигате.ть, пневмоклапаном, установ5ленным на свободном торце фланца и сообщенным с рабочей полостью двигателя, датчиками перемещения и положения рабочей головки, автоматизированной следящей сиситемой управления, взаимодействующей
0 с последними, и системой ограничения момента затяжки, выполненной в виде магнитострикционного датчика, размещенного на вертикальной направляющей и взаимодействующего с корпусом редуктора, установленного на шариковой otiope и связанного с магнитострикционным датчиком через упругий элемент, генератора, усилителя формирования сигнала, компаратора, индикатора момента, блока задания момента затяжки, усилителя и логического блока, при этом
0 выход магнитострикционного датчика соединен через усилитель формирования сигнала с компаратором и индикатором момента, блок задания момента затяжки подключен к входу компаратора, выход которого соединен через усилитель и логический блок с
5 пневмоклапаном и автоматизированной следящей системой управления, а подвижная полумуфта торцовой муфты размещена на выходном валу редуктора и подпружинена относительно ее неподвижной полумуфты, соединенной со шпинделем.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3811513, кл. В 25 В 23/14, (173/12), Г974.
2.Авторское свидетельство СССР
Яо 753628, кл. В 25 В 21/00,1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический гайковерт | 1981 |
|
SU1174221A1 |
| Гайковерт | 1990 |
|
SU1775287A1 |
| ГАЙКОВЕРТ | 2011 |
|
RU2473417C1 |
| Гайковерт | 1984 |
|
SU1222529A1 |
| ГАЙКОВЕРТ ДЛЯ СБОРКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ КОНТРОЛЯ УСИЛИЯ ЗАТЯЖКИ | 1991 |
|
RU2036075C1 |
| Пневматический угловой гайковерт | 1989 |
|
SU1676789A1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАТЯЖКОЙ РЕЗЬБОВОГО СОЕДИНЕНИЯ С ИСПОЛЬЗОВАНИЕМ ПНЕВМАТИЧЕСКОГО ГАЙКОВЕРТА | 2014 |
|
RU2558744C1 |
| Устройство для сборки резьбовых соединений | 1989 |
|
SU1655767A1 |
| Пневматический гайковерт | 1990 |
|
SU1782717A1 |
| Устройство для сборки резьбовых соединений | 1984 |
|
SU1215984A1 |