Известно также устройство для гашения механических колебаний объекта на двухкамерной пневмоподвеске, содержащее корпус, разделенный на Д1зе камеры, расположенный между камерами импульсный электроклапан, имеющий обмотку; возбуждения и блок управления переключением электроклапана. Блок управления электроклапаном включает в себя фильтр низких частот, подключенный к выходу датчика ускорений, и периодические звенья, соединенные последовательно с фильтром низких частот, усилитель мощности, реле и сумматор, к входам которого через соответствующие репе подклю чены выходы апериодических звеньев, а к выходу через усилитель мощности - об- мотка электроклапа-на. Величина жесткости подвески при указанном ее изменении принимает два значения: минимальное, соответствующее движению объекта к положению статического равновесия, и максимальное, соответствующее движению объекта к своим крайним положениям. Диссипация энергии колебаний объекта осуществляется в крайних положениях объекта за счет созданной в течение четверти периода (при движении объе та от положения статического равновесия разности химических потенциалов газов, под действием которой происходят необра тимые термодинамические процессы перетекания и смещивания газов полостей. Изменение структуры упругих связей, при водящее к появлению диссипации энергии колебаний, позволяет гасить механические колебания без введения в подвеску сил сопротивления, обеспечиваемых специальным гасящим устройством L4 J. Однако известные способ и устройство не обеспечивают эффективного гаще- ния механических колебаний в связи с тем, что принятые в этом способе и устройстве последовательность и длительность процессов перетекания и смещивания газов между полостями не обеспечивают высокой степени необратимости эти термодинамических процессов, а следовательно, не обеспечивают и высокой степени диссипации энергии колебаний. С одной стороны это обуслов-пено тем, что в известном способе и устройстве по этому способу соединение полостей производят в положениях, соответствующих небольшим амплитудам колебаний объекта, а не в положениях, соответствуюших наибольшей разности химических потенциалов газов полостей.
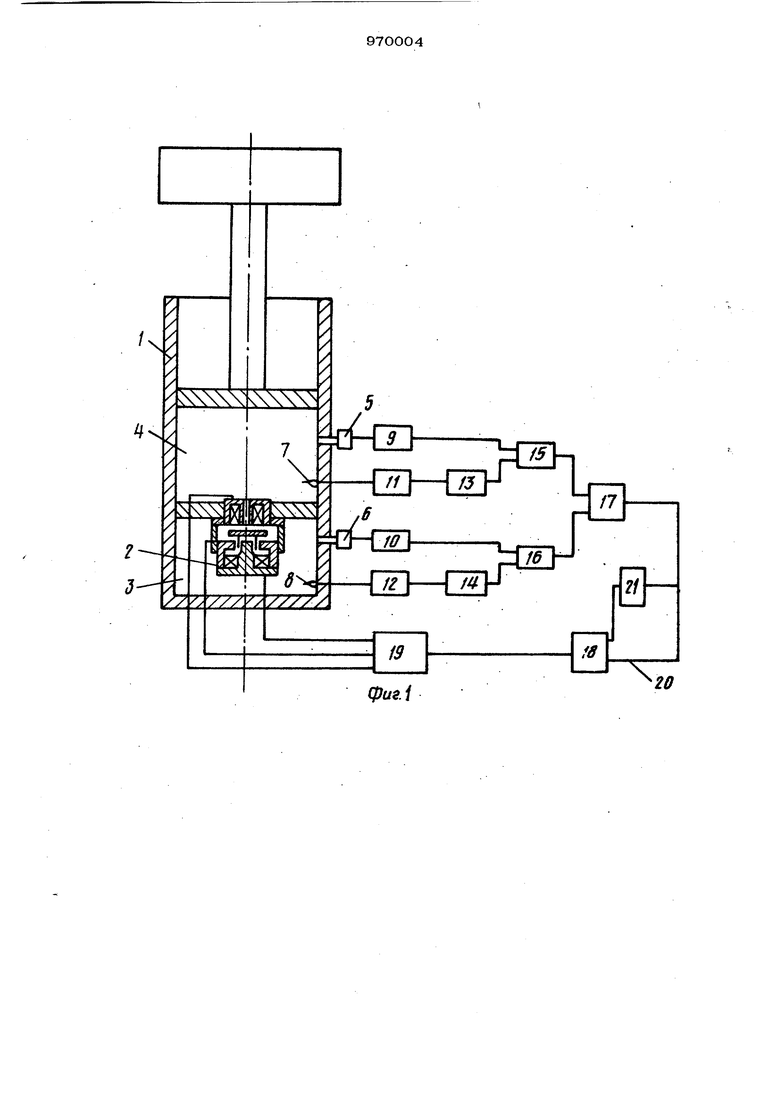
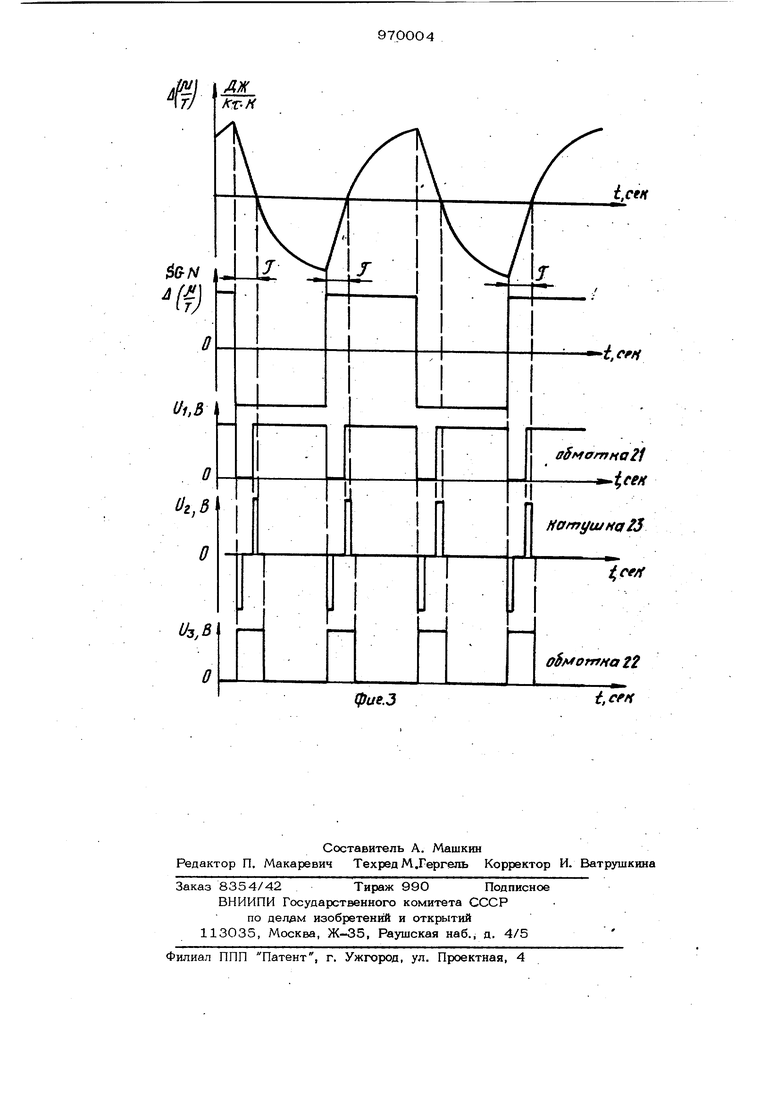
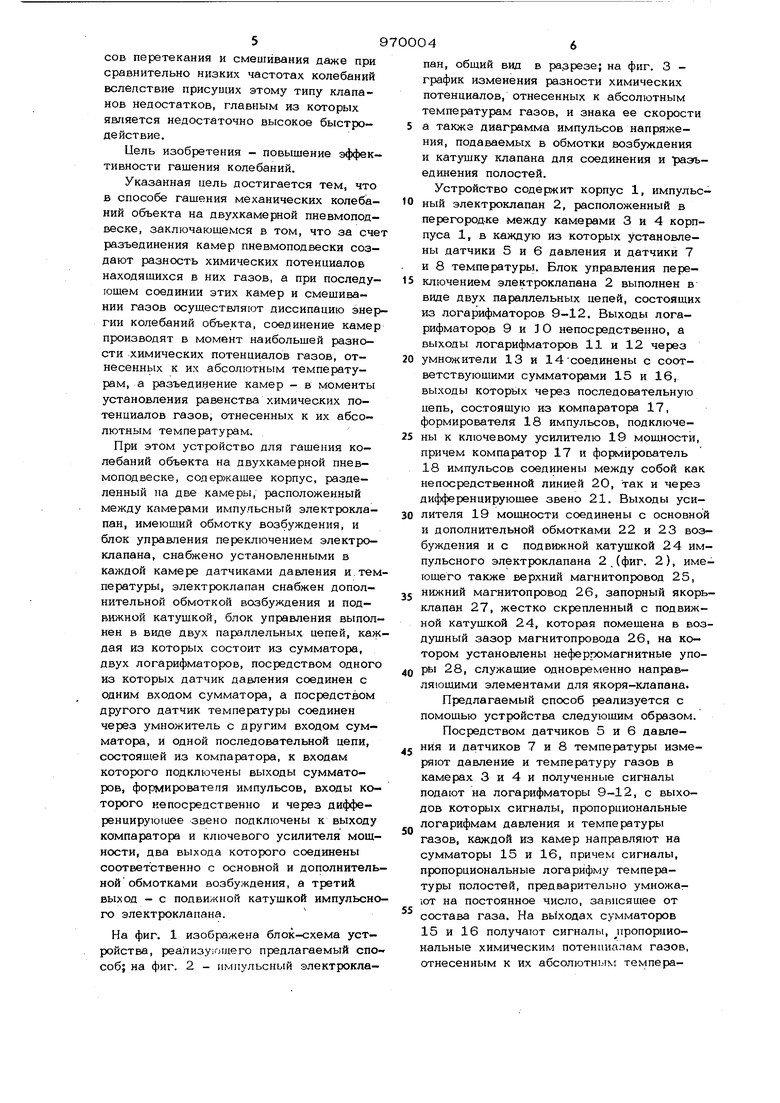
Указанные положения объекта различны вследствие неизбежного теплообмена газов полостей с окружающей средой и ругих причин. С другой стороны, малая степень диссипации энергии колебаний в известных способе и устройстве обусловлена еще и тем, что после установления равенства химических потенциалов газов полостей вблизи крайних, соответ- ствующих наибольшим амплитудам положениях амортизированного объекта производство энтропии и диссипация энергии в пневмоподвеске прекращаются, и при последующем движении объекта к положению статического равновесия парамет- ры состояния газа в полостях изменяются одинаково. Тем самым, четверть периода колебаний .между газами полостей не создается разность химических потенциалов, которая является главной движущей силой для производства энтропии в подвеске. Последующее прекращение одинакового изменения термодинамических параметров газов полостей, осуществляемое путем разъединения полостей в подожении статического равновесия, приводит при дальнейшем движении объекта к созданию некоторой разности химических потенциалов газов. Но эта разность невелика, так как она создается за счет энергии колебаний объекта только в течение четверти периода колебаний объекта, следовательно, незначите тьной будет степень необратимости последующих термодинамических процессов перетекания, смещивания газов и диссипации энергии колебаний. Причиной отмеченных недостатков в известном устройстве является, во-первых, применение датчика ускорений, с помощью которого можно зафиксировать только кинематические характеристики объекта, но не термодинамические параметры состояния газов полостей, определяющие разность химических потенциалов и диссипацию энергии колебаний. Во-вторых, применение в блоке управления переключения электроклапана релейных элементов, срабатывающих от сигналов, пропорциональных перемещению и скорости объекта, в принципе не позволяет произвести соединение и разъединение, полостей в положениях объекта, отличающихся от крайних и от положения статического равновесия. Кроме того, электроклапан, примененный в устройстве для реализации известного способа, не позволяет обеспечить высокую степень необратимости термодинамических процес5соБ перетекания и смешивания даже при сравнительно низких частотах колебаний вследствие присущих этому типу клапанов недостатков, главным из которых яв;1яется недостаточно высокое быстродействие. Цель изобретения - повышение эффективности гашения колебаний. Указанная цель достигается тем, что в способе гашения механических колебаний объекта на двухкамерной пневмоподвеске, заключающемся в том, что за сче разъединения камер пневмоподвески создают разность химических потенциалов находящихся в них газов, а при последующем соединии этих камер и смещивании газов осуществляют диссипацию энер гии колебаний объекта, соединение камер производят в момент наибольшей разности химических потенциалов газов, отнесенных к их абсолютным температурам, а разъединение камер - в моменты установления равенства химических потенциалов газов, отнесенных к их абсолютным температурам. При этом устройство для гашения колебаний объекта на двухкамерной пневмоподвеске, содержащее корпус, разделенный па две камеры, расположенный между камерами импульсный злектрокла- пан, имеюший обмотку возбуждения, и блок управления переключением электро- клапана, снабжено установленными в каждой камере датчиками давления и тем пературы, электроклапан снабжен дополнительной обмоткой возбуждения и подвижной катушкой, блок управления выпол нен в виде двух параллельных цепей, каж дая из которых состоит из сумматора, двух логарифматоров, посредством одног из которых датчик давления соединен с одним входом сумматора, а посредством другого датчик температуры соединен через умножитель с другим входом сумматора, и одной последовательной цепи, состоящей из компаратора, к входам которого подключены выходы сумматоров, формирователя импульсов, входы ко торого непосредственно и через дифференцируюшее звено подключены к выходу компаратора и ключевого усилителя мощ ности, два выхода которого соединены соответственно с основной и дополнитель ной обмотками возбуждения, а третий, выход - с подвижной катушкой импульсн го электроклапана. На фиг. 1 изображена блок-схема устройства, реализующего предлагаемый спО соб; на фиг. 2 - импульсный электрокла4пан, общий вид в разрезе; на фиг. 3 график изменения разности химических потенциалов, отнесенных к абсолютным температурам газов, и знака ее скорости а такжа диаграмма импульсов напряжения, подаваемых в обмотки возбуждения и катушку клапана для соединения и разъединения полостей. Устройство содержит корпус 1, импульсный электроклапан 2, расположенный в перегородке между камерами 3 и 4 корппуса 1, в каждую из которых у становле- ны датчики 5 и 6 давления и датчики 7 и 8 температуры. Блок управления пеpeключением электроклапана 2 выполнен в виде двух параллельных цепей, состоящих из логарифматоров 9-12. Выходы лога- рифматоррв 9 и 3 О непосредственно, а выходы логарифматоров 11 и 12 через умножители 13 и 14соединены с соответствующими сумматорами 15 и 16, выходы KOTOpbix через последовательную цепь, состоящую из компаратора 17, формирователя 18 импульсов, подключены к ключевому усилителю 19 мошлости, причем компаратор 17 и формирователь 18 импульсов соединены между собой как непосредственной линией 20, так и через дифференцирующее звено 21. Выходы усилителя 19 мощности соединены с основной и дополнительной обмотками 22 и 23 возбуждения и с подвижной катущкой 24 импульсного электроклапана 2 (фиг. 2), имеющего также верхний магнитопровод 25, нижний магнитопровод 26, запорный якорьклапан 27, жестко скрепленный с подвижной катушкой 24, которая помещена в воздушный зазор магнитопровода 26, на котором установлены неферромагнитные упоры 28, служащие одновременно направляющими элементами для якоря-клапана. Предлагаемый способ реализуется с помощью устройства следующим образом. Посредством датчиков 5 и 6 давления и датчиков 7 и 8 температуры измеряют давление и температуру газов в камерах 3 и 4 и полученные сигна.чы подают на логарифматоры 9-12, с выходов которых сигналы, пропорциональные логарифмам давления и температуры газов, каждой из камер направляют на сумматоры 15 и 16, причем сигналы, пропорциональные логарифму температуры полостей, предварительно умно 1 аioT на постоянное число, зависящее от состава газа. На выходах сумматоров 15 и 16 получают сигналы, фопорниональные химическим потенциалам газов, отнесенным к их абсолютным температурам, которые подают на кот шаратор 17, с выхода которого снимают сигнал, пропорциональный разности химических потенциалов газов камер 3 и 4. Этот сигнал непосредственно через линию 20 и через дифференцирующее звено 21, с помощью которого получают скорость изменения сигнала, подают на формирователь 18 импульсов, при Помощи которого в положениях объекта, соответствующих наибольшей разности отнощений химических потенциалов газов и их температурам, определяют знак скорости этой разности и вырабатывают запускающие импульсы, которые направляют на ключевой усилитель 19 мощности. Посредством ключевого усилителя 19 мощности формируют прямоугольный провал напряжения в обмотке 22 возбуждения (фиг. 3) и подают импульсы напряжения в обмотку 23 и подвижную катущку 24, благодаря чему перемещают запорный якорь-клапан 27 в Крайнее нижнее положение до соприкосновения с упорами 28 и сообщают камеры 3 и 4. После установления равенства химических потенциалов газов, отнесенных к их абсолютным температурам, задним фронтом провала напряжения в обмотке 22 подают в подвижную катущку 24 импульс напряжения противоположной полярности, благодаря чему перемещают якорь-клапан 27 в крайнее верхнее положение и разобщают камеры 3 и 4. Длительность промежутка времени S. в течение которого камеры 3 и 4 сообщены, подбирают экспериментально, определяя момент установления ра венства химических потенциалов газов, отнесенных к их абсолютным температурам. Использование предлагаемых способа и устройства для решения механических колебаний обеспечивает по сравнению с известными способами и устройствами повышение плавности хода и срешней скорости движения транспортных средств уменьшение динамических нагрузок, передаваемых на сооружения при ударных воздействиях, например землетрясениях, повыщение надежности систем амортизации, так как реализация предлагаемого способа позволит отказаться от применения гидроамрртизаторов.
Формула изобретения
1. Способ гашения механических колебаний объекта на двухкамерной пневмоподвеске, заключающийся в том, что за счет разъединения камер пневмоподвески создают разность химических потенциалов находящихся в них газов, а при последующем соединении этих камер и смешивании газов осуществляют диссипацию энергии колебаний объекта, отличающийся тем, что, с целью повышения эффективности гашения колебаний, соединение камер производят в моменты наибольшей разности химических потенциалов газов, отнесенных к их абсолютным температурам, а разъединение камер - в моменты установления равенства химических потенциалов газов, отне сенных к их абсолютным температурам. 2. Устройство для гашения механических колебаний объекта на двухкамерной пневмоподвеске, содержащее корпус, разделенный на две камеры, расположенный между камерами импульсный электроклапан, имеющий обмотку воз-
буждения, и блок управления переключением электроклапана, отличающееся тем, что оно снабжено установленными в каждой камере датчиками давления и температуры, электроклапан снабжен дополнительной обмоткой возбуждения и подвижной катушкой, блок управления выполнен в виде двух параллельных цепей, каждая из которых состоит из сумматора, двух логарифматоров, посредством одного из которых датчик давления соединен с одним входом сумматора, а посредством другого датчик температуры через умножитель - с другим входом сумматора и одной последовательной цепи, состоящей из компаратора, к входам которого подключены выходы сумматоров, формирователя импульсов, входы которого непосредственно и через дифференцирующее звено подключены к выходу компаратора и ключевого усилителя мощности, два выхода которого соединены соответственно с основной и дополнительной обмотками возбуждения, а третий выход - с подвижной катушкой импульсного электроклапана.
Источники информации, принятые во внимание при экспертизе
1.Елисеев С. В. Структурная теория виброзащитных систем. Новосибирск, Наука , 1978, с. 206.
2.Авторское свидетельство СССР № 623759, кл. В 60 G 11/26, 1978.
3.Емельянов С. В. Системы автоматического управления с переменной структурой. М., Наука, 1967, с. 48
(прототип).
4.Авторское свидетельство СССР № 56877О, кл. F16F 9/5О, 1975 (прототип). фие.Э t.Cfff i.cffi вдматна21 feft Hamt/u/HalS ff A Orrr/fO 22 i.cff
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гашения механических колебаний | 1981 |
|
SU1017858A1 |
| СПОСОБ ГАШЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2412388C2 |
| ПНЕВМАТИЧЕСКАЯ ПОДВЕСКА | 2006 |
|
RU2325285C1 |
| ПНЕВМАТИЧЕСКАЯ ПОДВЕСКА | 2006 |
|
RU2325568C1 |
| Устройство для гашения колебаний объекта | 1974 |
|
SU568770A1 |
| Устройство для гашения колебаний | 1984 |
|
SU1260592A1 |
| Двухкамерный пневматический амортизатор | 1986 |
|
SU1442746A1 |
| Амортизатор | 1985 |
|
SU1320560A1 |
| Электродинамический вибратор | 1990 |
|
SU1837996A3 |
| ПНЕВМАТИЧЕСКАЯ ПОДВЕСКА | 2006 |
|
RU2304523C1 |