Изобретение относится к приборостроению и представляет собой опорную си.стему для приборов, чувствительных к изменению углового положения относительно горизонта и в азимуте.
Известны опорные системы, предназначенные для горизонтирования объектов. Так, например, известна опорная система, состоящая из основания и трех винтовых домкратов liljНедостаток указанной опорной системы заключается в том, что резьбовые соединения домкратов с основанием стенда являются источниками нестабильности положения стенда: в результате воздействия случайных факторов (сотрясений, изменения температуры и т.п.) происходит самопроизвольное перемещение основания объекта как относительно горизонта, так и в азимуте.
Известна также опорная система, состоящая из корпуса с полой осью, двух пар клиновых пластин с центрирующими элементами, установленных с возможностью вращения на неподвижной полой оси, сжатых пружиной между фланцем корпуса и замокающей платой. Пары клиновых пласти.н, выполненные с одинаковыми двугранными углами,разъединены разделительной пластиной, .
соединенной с осью с помощью штифта, исключающего свободу вращения разделительной пластины вокруг полой оси. Клиновые пластины соединены с приводами встречного вращения (т.е. вра.щения каждой из пластин пары во взаимно противоположных направлениях на одинаковые углы) -2.
Известное устройство сложно, кро10ме того, оно не имеет средств для плавного изменения положения основания 9бьекта в азимуте.
Цель изобретения - повышение точности..
15
Поставленная цель достигается тем, что опорная система, содержащая корпус с полой осью, на которой размещены клиновые пластины с центрирующими элементами и зубчатыми коле20сами, заи«кающую плату с поводком и привод врсццения клиновых пластин, снабжена опорными кольцами, закрепленными на клиновых пластинах, и двумя кронштейнами, один из которых за25креплен на корпусе неподвижно, а второй - в кольцевом пазу корпуса с воз- можностью перемещения, привод выполнен в виде механизма согласно-встречного вращения с узлом переключении
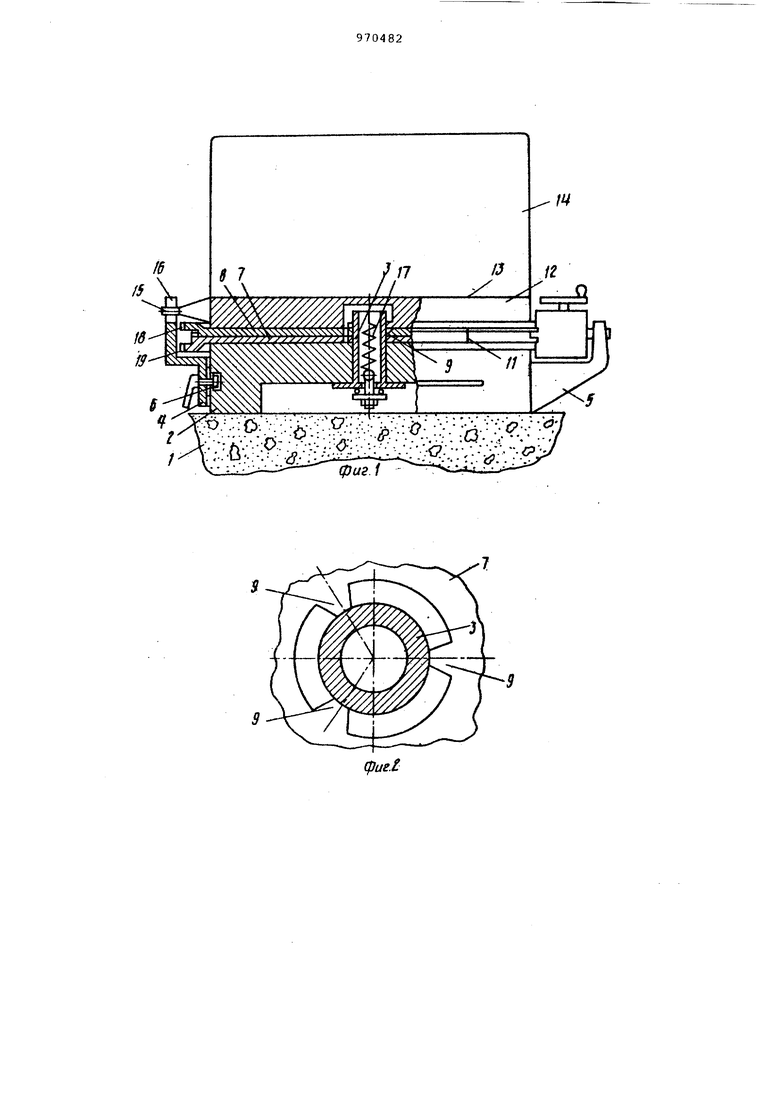
30 вращения, размещенного в каретке. опирающейся посредством роликов на опорные кольца, и цилиндрического штифта, расположенного в вертикальном пазу неподвижного кронштейна корпуса, а поводок замыкающей платы расположен в вертикальном пазу второго кронштейна. На фиг.1 представлена предлагаемая система и объект горизонтирования; на фиг. 2 - центрирующие элементы, в сечении по плоскости йзаимного касания клиновых пластин, на фиг.З клиновые пластины и привод клиновых пластин; на фиг.4 - зубчатые колеса привода клиновых пластин в положении соответствующем согласному вращению пластин; на фиг.5 - то же, в положении, соответствующем встречному вращению пластин. Устройство содержит фундамент 1, на котором закреплен корпус 2 с полой осью 3, кронштейнами 4 и 5 и кольцевым пазом 6. На верхнюю поверх ность корпуса 2 установлена пара кли новых пластин 7 и 8. Центрирующие элементы 9 клиновых пластин расположены под углом 120 друг относительно друга. Центрирующие элементы прилегают к плоскости взаимного касания клиновь Х пластин, для чего в описанном примере исполнения они имеют ско сы 10 (фиг.З) на внешних относительно плоскости взаимного касания клино вых пластин сторонах. Клиновые плас тины 7 и 8 в исходном (нулевом) поло жении опорной системырасположены на встречу друг другу (двугранные углы образуемые рабочими плоскостями обра щены навстречу друг другу). При этом пара клиновых пластин эквивалентна одной плоскопараллельной пластине. На клиновых пластинах нанесены риски 11, которые при таком положении клиновых пластин должны быть совмещены. Замыкающая плата 12 установлена на клиновую пластину 8. Замыкающая плата, как и клиновые пластины, имеет центральное отверстие и центрирующие элементы 9, касающиеся полой оси 3, а также рабочую площадку 13 для установки объекта 14 и поводо 15, располагающийся в вертикальном пазу 16 кронштейна 4. Замыкающая плата 12 вместе с клиновыми пластина ми 7 и 8 прижата пружиной 17 к корпусу 2. На каждой клиновой пластине 7 и 8 закреплено по цилиндрическому зубчатому колесу 18 и 19 (фиг.1 и 3 При этом ось каждого зубчатого венца перпендикулярна плоскости взаимного касания клиновых пластин. На внешних Относительно плоскости взаимного касания клиновых пластин поверхностях зубчатых колес 18 и 19 закреплены опорные кольца 20 (фиг.З) с конусной рабочей поверхностью. На колесе 19 закреплено кольцо 21 с цилиндрической рабочей поверхностью. Приврд клиновых пластин (фиг.З) содержит каретку 22 и механизм 23 сргласновстречного вращения, размещенный в каретке 22, обеспечиваюощй совместное вращение клиновых пластин в одинаковом направлении (согласное вращение) , или вращение клиновых пластин в противоположных направлениях на одинаковые углы (встречное вращение). Каретка 22 состоит из корпуса 24, четырех роликов 25 и цилиндрического штифта 26. Ролики 25 установлены на осях 27 в корпусе 24. Два из них опираются на конусные поверхности опорных колец 20, а другие два -. на цилиндрическую поверхность кольца 21. Цилиндрический штифт 26 располагается в вертикальном пазу 38 кронштейна 5 с возможностью продольных перемещений. Механизм 23 (фиг.3-5) содержит вал 29 с закрепленными на нем маховиком 30, шестернями 31 и 32, имеющими одинаковое число зубцов, и кольцевой поводок 33. Шестерня 31 находится в постоянном зацеплении с зубчатым колесом 18 и с гТаразитной шестерней 34 (фиг. 4 и 5). Посредине паразитной шестерни 34 имеется кольцевая проточка 35, в которой располагается кольцевой поводок 33. На верхнем конце вала 29 имеются две проточки 36, в одну из которых входит шарик фиксатора 37, удерживая вал 29 в осевом направлении в одном из двух положений. Опорная система работает следующим образом. В верхнем положении маховика 30 (фиг.4) шарик фиксатора 37 находится в нижней проточке 36 вала 29, при этом шестерня 31 находится в зацеплении с зубчатым колесом 18, шестерня 32 - с зубчатым колесом 19, а паразитная шестерня 34 располагается в свободном промежутке между зубчатыми колесами 18 и 19, не входя ни с одним из них в зацепление. При вращении маховика 30 вращение от шестерен 31 и 32 передается одновременно зубчатым колесам 18 и 19, в результате чего обе клиновые пластины 7 и 8 будут поворачиваться согласно. Если при этом риски 11 совпадают, то согласное вращение клиновых пластин не вызывает изменения углового положения замыкающей плиты относительно горизонта. В нижнем положении маховика 30 (фиг.5).шарик фиксатора 37 находится в верхней проточке 36 вала 29, при этом шестерня 31 продолжает оставаться в зацеплении с зубчатым колесом 18, а паразитная шестерня 34 находится в зацеплении с зубчатым колесом 19. При таком положении шестерен вращение маховика 30 вь1зывает поворот зубчатых колес 18 и 19 в противоположные стороны на одинаковые углы, т.е. встречное вращение.. При вращении маховика 30 зубчатые колеса 18 и 19 одновременно с вращением относительно полой оси совершают угловые перемещения относительно осей перпендикулярных полой оси в пределах клиновидности клиновой пластины 7. Благодаря прилеганию центрирующих элементов 9 к плоскости взаимного ка сания клиновых пластин 7 и 8, оба зубчатых колеса 18 и 19 совершают указанные угловые перемещения совмес тно, без радиальных перемещений друг относительно друга. При этом каретка 22 с помощью цилиндрического штифта 26 и паза 28 удерживается в неизменном угловом положении относительно корпуса 2, ас помощью роликов 25, катящихся по опорным кольцам 20 и 21 удерживает шестерни механизма 23 в нормальном зацеплении с зубчатыми ко лесами 18 и 19, При необходимости изменения положения объекта 14 в азимуте/ освобождает винт крепления кронштейна 4 в пазу б корпуса 2. Маховик 30 устанав ливают в верхнее положение, вращая его, измейяют. положение зa икaющeй платы 12 до тех пор, пока объект не будет приведен в заданное положение по азимуту, после чего кранштейн закрепляют в пазу корпуса. При горизонтировании объекта на замыкающую плату 12, или непосредственно на площадку объекта 14, устаг навливают уровень. Устанавливают маховик 30 в верхнее положение. Поворачивают с помощью маховика 30 клиновые пластины согласно в положение, при котором направление отклонения пузырька уровня совпадает с направлением, проходящим через центр замыкающей пластины и положением рисок 11 (риски совпадают). Переводят маховик 30 в нижнее положение. Поворачивают с помощью маховика клиновые пластины встречно в положение, при котором пузырек уровня занимает нуле вое (среднее) положение. Эффективность изобЕ етения заключается в упрощении конструкции опорной системи за счет исключения ряда наименований деталей, которая является непременной необходимостт п для прототипа: количество клиновых пластин сокращается в два раза; исключается разделительная пластика, количество приводов вращения пластин сокращается в два раза; расширяются функциональные возможности за счет достижения возможности ориентирования замыкающей платы в азимуте, уменьшается количество последовательно соединенных деталей, изменение размеров которых определяют стабильность положения объекта горизонтирования. Формула изобретения Опорная система, содержащая корпус с полой осью, на которой размещены клиновые плостины с центрирующими элементами и зубчатыми колесами, замыкающую плату с поводком и привод вращения клиновых пластин, отличающаяся тем, что, с целью повышения точности, она снабжена опорными кольцами, закрепленными на клиновых пластинах, и двумя кронштейнами, первый из которых закреплен на корпусе неподвижно, а второй - в кольцевом пазу корпуса с возможностью перемещения, привод выполнен в виде механизма согласно-всречного вращения с узлом переключения вращения, размещенного в каретке, опирающейся посредством роликов на опорные кольца, и цилиндрического штифта, расположенного в вертикальном пазу неподвижно.го кронштейна корпуса, а поводок замыкающей платы расположен в вертикальном пазу второго кронштейна. Источники информации, принятые во внимание при экспертизе 1.Линейные и угловые измерения. Под ред. Г.Д.Бурдуна..М. , Издательство стандартов, 1977, рис. 104, 222. 2.Авторское свидетельство СССР 792200, кл. G 02 В 7/00, 1979.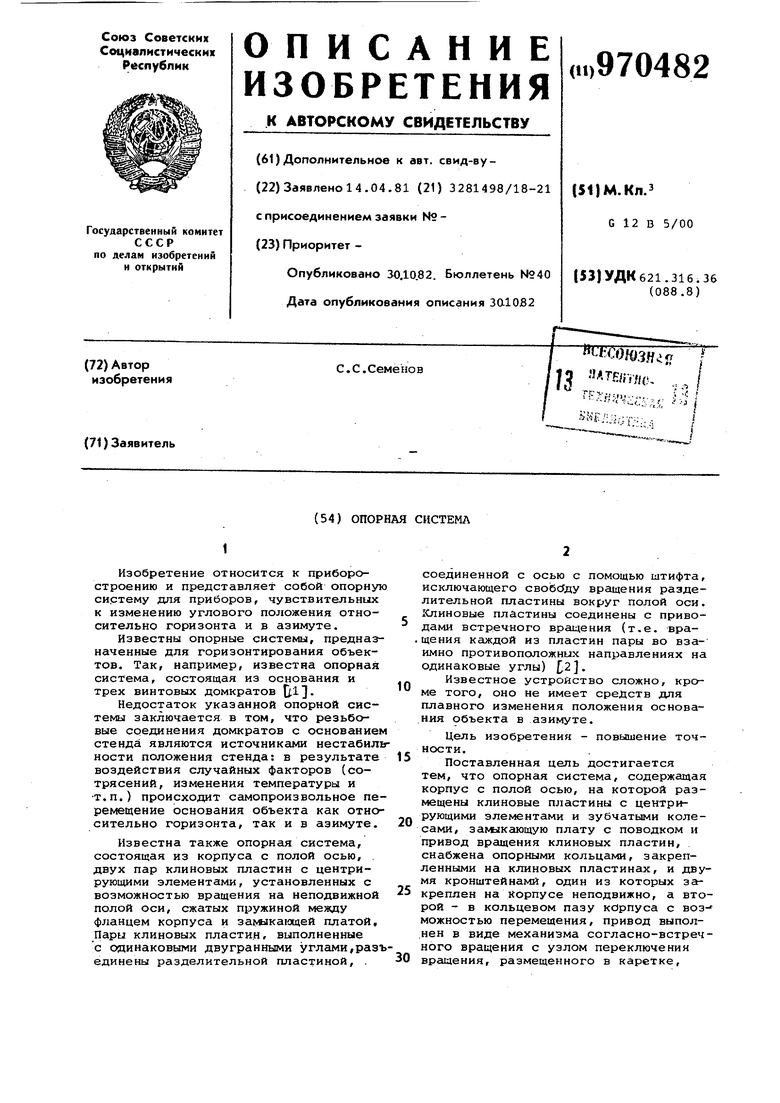

| название | год | авторы | номер документа |
|---|---|---|---|
| Юстировочный прибор | 1979 |
|
SU792200A1 |
| Юстировочный прибор | 1979 |
|
SU871117A2 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
| Фрикционная муфта сцепления | 1985 |
|
SU1288396A1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Устройство для измерения размеров трубы | 1990 |
|
SU1747862A1 |
| ЗАТВОР ПОВЫШЕННОЙ ГЕРМЕТИЧНОСТИ И ВИБРАЦИОННОЙ СТОЙКОСТИ С УСИЛЕННЫМ СТОПОРЕНИЕМ ДЛЯ СОСУДОВ И АППАРАТОВ, РАБОТАЮЩИХ ПОД ВНУТРЕННИМ ИЛИ НАРУЖНЫМ ДАВЛЕНИЕМ | 2007 |
|
RU2346197C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ДЕРЖАТЕЛЯ ОБЪЕКТА | 1996 |
|
RU2112260C1 |
| МНОГОПОЗИЦИОННАЯ ВРАЩАЮЩАЯСЯ УСТАНОВКА ДЛЯ ДЕМОНСТРАЦИИ ИНФОРМАЦИОННЫХ МАТЕРИАЛОВ | 2007 |
|
RU2336575C1 |