(54) МЕХАНИЗМ ПЕРЕДВИЖКИ СЕКЦИЙ КРЕПИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Проходческий комбайн | 1986 |
|
SU1432230A1 |
| Механизированная крепь для выемки угля с закладкой выработанного пространства | 1977 |
|
SU693028A1 |
| Механизированная крепь | 1985 |
|
SU1271977A1 |
| Основание секции механизированной крепи | 1988 |
|
SU1521880A1 |
| Механизированная крепь | 1985 |
|
SU1284013A1 |
| УСТРОЙСТВО ПЕРЕДВИЖЕНИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2028455C1 |
| Механизированная крепь | 1981 |
|
SU1023102A1 |
| Крепь монтажного слоя | 1982 |
|
SU1027408A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1970 |
|
SU265823A1 |
| Механизированная крепь для отработки крутых пластов угля | 1979 |
|
SU899999A1 |
1
Изобретение относится к подземной добыче полезных ископаемых, а именно к механизированным крепям очистных забоев шахт и предназначено для использования на пологих пластах.
Известен механизм передвижки секций 5 крепи, состоящий из направляющей лыжи, поперечины, щарнирно закрепленной на основании и гидродомкрата передвижки, одним концом соединенным с лыжой, а другим с поперечиной 1.,о
Недостатком такого механизма передвижки является то, что он не обеспечивает регулированного щага передвижки крепи и конвейера.
Наиболее близким к предлагаемому тех ническим решением по технической сущнос- 15 ти и достигаемому результату является механизм передвижки секций крепи, включающий щарнирно соединенную с конвейером направляющую балку, на которой установлен с возможностью продольного переме- ,0 щения с помощью гидродомкрата передвижки ползун с тягами, соединенными со стойками секции 2.
Недостатком указанного технического решения является то, что оно не обеспечивает
регулировки шага передвижки крепи и конвейера, что ограничивает область его использования.
Цель изобретения - повышение области использования механизма за счет обеспечения регулировки шага передвижки крепи и конвейера.
Это достигается тем, что гидродомкрат передвижки размещен в направляющей балке, которая имеет отверстия для фиксации гидродомкрата в продольном направлении, причем расстояние между отверстиями равно разнице между шагами передвижки, а тяги на ползуне и стойках закреплены шарнирно с возможностью вертикального перемещения.
При этом поперечное сечение направляющей балки выполнено Т-образной формы.
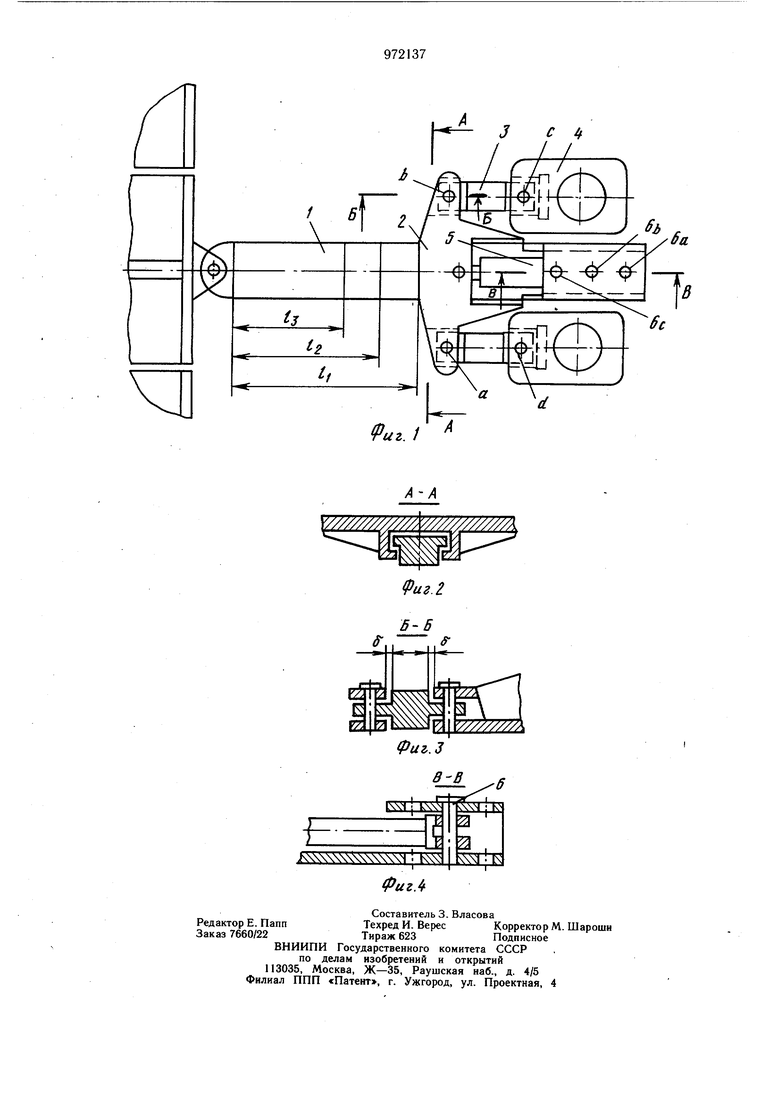
На фиг. 1 изображен механизм передвижки секций крепи, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг 1.
Механизм содржит направляющую балку 1, подвижно насаженный на нее ползун 2, а также тяги 3, соединяющие ползун 2 и стойки 4, имеющие шарниры в точках а, в, с, н А. Завальный конец балки 1 выполнен в виде коробки нрямоугольного сечения, в которую вставлен гидродомкрат 5 передвижки и зафиксирован в одном из положений посредством пальца 6. Для реземещения пальца имеются три отверстия - 6а, бе, и 6с, расположенные по оси балки (в коробнатой части ее) на расстоянии, соответствующем разнице между шагами передвижки крепи, зависящими от величины захвата добычной машины. Механизм работает следующим образом. Для передвижки секции крепи снимается давление в стойках 4 и подается рабочая жидкость в поршневую полость гидродомкрата 5, шток которого при этом выдвигается и перемещает ползун 2 по балке 1 (в направлении забоя) и связанные с ним стойки 4 на величину хода штока. Забойный конвейер передвигается распора стоек 4 и подачи рабочей жидк -и в штоковую полость гидродомкрата 5 и при неподвижном штоке перемещается направляющая балка 1, связанная шарниром 6 с гидродомкратом 5. Самоустановка стоек 4 из-за возможной неровности почвы рбеспечивается за счет зазоров в местах связи тяг 3 с ползуном 2 и стойками 4. Изменение ширины призабойного поддерживаемого пространства и изменение щага передвижки достигается путем перестановки пальца 6 шарнира, в отверстия 6а и бе. Каждое положение пальца 6 соответствует определенной величине передвижки, или определенной величине захвата применяемого выемочного комбайна. Так положение пальца 6 в отверстии 6а может соответствовать величине передвижки, например, 0,8 м; в отверстии бе - величине передвижки, например 0,63 м, а в отверстии 6с - величине передвижки 0,5 м. При этом величина хода ползуна 2 определяется крайним положением его, соответствующим различНым положениям пальца 6; при положении пальца 6 в отверстии 6а шток домкрата 5 полностью выдвигается, и ход ползуна равен длине li; при положении пальца 6 в отверстиях бе и 6с шток домкрата 5 выдвигается не полностью и ход ползуна равен, соответственно, 12 и Ij. Таким образом, расстояние между отверстиями, в которые вставляется палец 6, равно разнице между шагами. Тяги 3 соединяют ползун 2 со стойками 4 и имеют шарнирные соединения в точках а, е. с и d. При передвижке стоек крепи равнодействующая сил сопротивления передвижению будет направлена по линии осей шарниров. Складывание силового четырехугольника aecd при передвижке конвейера исключается благодаря тому, что тяги 3, связывающие стойки 4 с ползуном 2, имеют ограниченную подвижность, которая достигается установлением зазоров 6 (фиг. 3 Непосредственная связь ползуна со стойками значительно упрощает конструкцию крепи и делает ее менее металлоемкой. Возможность изменения шага передвижки крепи и конвейера позволяет применять комбайны с различной шириной захвата и выбирать рациональную ширину поддерживаемого призабойного пространства в зависимости от горногеологнческих условий. Формула изобретения 1.Механизм передвижки секций крепи, включающий шарнирно соединенную с конвейером направляющую балку, на которой установлен с возможностью продольного перемещения с помощью гидродомкрата передвижки ползун с тягами, соединенными со стойками, секций, отличающийся тем, что, с целью расщирения области использования механизма за счет обеспечения регулировки шага цередвижки крепи и конвейера, гидродомкрат передвижки размещен в направляющей балке, которая имеет отверстия для фиксации гидродомкрата в продольном Направлении, причем расстояние между отверстиями равно разнице между щагами передвижки, а тяги на ползуне и стойках закреплены щарнирно с возможностью вертикального перемещения. 2.Механизм по п. 1, отличающийся тем, что поперечное сечение направляющей балки выполнено Т-образной формы. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 745373, кл. Е 21 D 23/00, 1976. 2.Патент ФРГ № 1758763, кл. Е 21 D 23/04, опублик. 1976.
