Автоматические регу.пяторы с наралле.тьным включеине.м звеньев и применением статического с жесткой обратно связью и аста-пического сервомоторов известны.
Предметом настоящего изобретения является автоматический регулятор д.тя стабилизацин регулируемых систем нутем нрименения пара.ьтельиых, одинаково иан)ав.тенных усилительных н интегрирующих звеньев, си1-налы которых суммир ются. Выходной рычаг гидравлического сервомотора регу.тятора соединен со нтоками двух порошей, из которых один нмеет жесткую обратную связь со втулкоГ| С1юего золотника, а штоки обоих золотников жестко связаны.
В отличие от извсст1И)1х автоматических регу.тяторов ь настоян1,ем регу.тяторе, с обеспечения рег лирования по параметру м но первой иронзводиоГг но времени, применены чувствительиый элемент и золотник, иодающиГ одиовременно снгнал i ститичсскщ н астатическиГг сервомоторы.
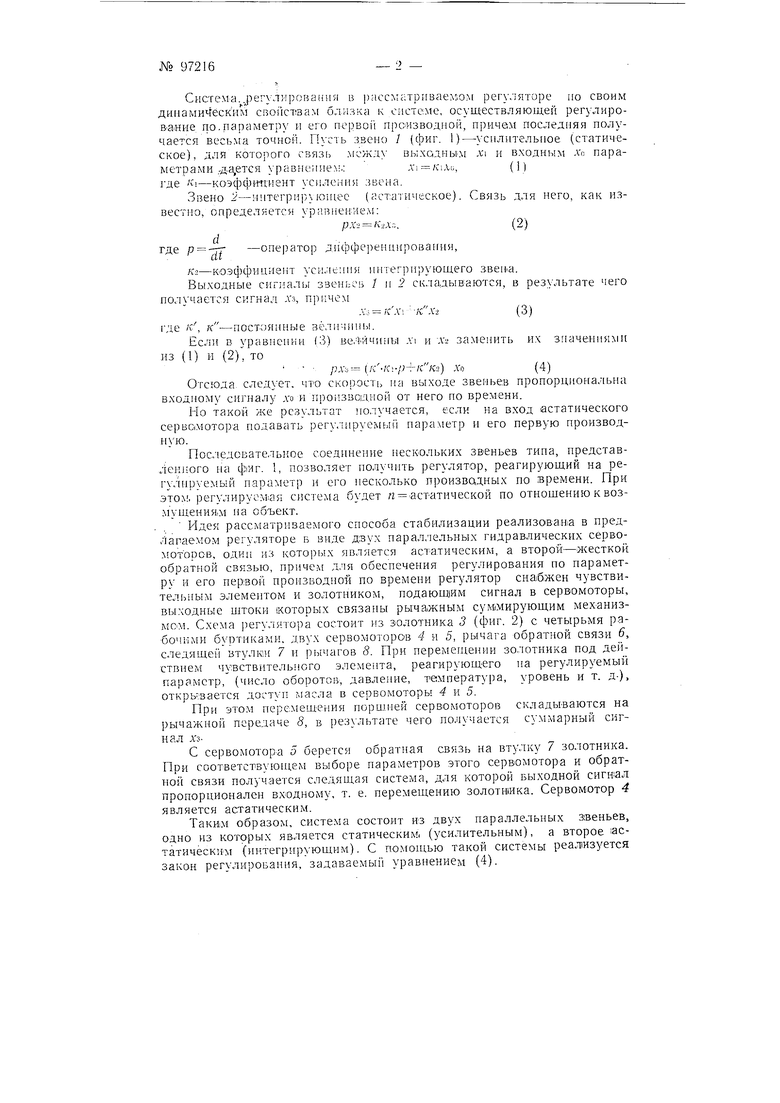
Ма фиг. 1 иоказа:1а нринииииальиая схема регу.чпрованая; на фиг. 2-схе.ма регу.тягора в разрезе.
При автом атическом регу,1ироваиин Д1Н1гателеп, T -p6;iii н т. п. устойчивы нроцесс 1 тpeбye Ь регул |1ования , олучить. к .у регу,- ятору не 1рямого де 1стБия с астатнческ м cepвoмo opo, добав Т) стаби.) ycTpoiicTBa.
реЗу.П/ГаТЬ О )OTe Де 1СТВИЯ (рере 1НИрую пие устройства, котор,е п)зволя от . . но параметру и его poизвoднь ио ). Однако создан)е ycTpofiства ДоТя нолучения искажен)х ,х связа 1о с больигим техническими труд1 остям ; этих условиях дифференнируюише устройства, являясь ио идее весьма эффект 1В ы средствам) стабилизации систем, з действител1И ости оказываются не всегда удовлетвоpитeль ы и.
№ 97216
Сисгема..-)егул;-1рсЕ5ання в рассматриваемом регуляторе по своим динамическим свойствам близка к системе, осуществляющей регулироВание по.параметру п ejo первой производпой, причем последняя получается весьма точной. Пусть звепо / (фиг. 1)-усплптель 1ое (статическое), для которого сгзязь . выхаднькм xi и входным ло параметрами . уравпеияем.:л1 /С1Л.м,(1) где | l-коэффициент успленпя звена.
Звено : -i5iTerpnp ioinee (астатическое). Связь для него, как известно, определкетси уравнением:
где P -оператор дифферепинрования,
яз-КОэффициент ус1-.1еипя интегрирующего звен.а.
Вы.ходные сигналы звеньев } п 2 складываются, в результате чего получается сигнал лз, причем
где к , к -постоянные зе.тпчнны.
Если в уравнении (3) ве.ЧНчины .vi и vv2 заменить их зиаченнями из (1) и (2), то
/;л-з (/С-К:-/Н-/С /С2) Хо(4)
Отсюда следует, что скорость на выходе звеньев пропорциональна входному сигналу ло и производной от него по времени.
Но такой же результат получается, если на вход астатического сервомотора подавать регу.тируемып параметр и его первую производную.
Последовате.тьное соединение нескольких звеньев типа, представленного на ф|Иг. 1, позволяет получить рег}лятор, реагирующий на регулнруемый параметр и его несколько производных по времени. При этом, регулируом)ая систел а будет п астатической по отнощению к воз,мущения м на объект.
. . Идея рассматриваемого способа стабилизации реализо1ван1а в предлагаемом регуляторе в виде д.вух параллельных гидравлических сервомоторов, один из которых является астатическим, а второй-жесткой обратной связью, причем для обеспечения регулирования по параметру и его пер:вой производной по времени регулятор снаб:Жен чувствительным элементом и золотником, подающ)им сигнал в сервомоторы, выходные щтоки которых связаны рычажным сум1мирующим механизмом. Схема регулятора состоит из золотника 3 (фиг. 2) с четырьмя рабочими буртиками, двух сервомоторов 4 и 5, рычага обратной связи 6, следящей втулки 7 и рычагов 8. При переменшпии зо.тотника под действием чувствительного элемента, реагирующего иа регулируемый параметр, (число оборотов, давление, температура, уровень и т. д-) открывается доступ масла в сервомоторы 4 и 5.
При этом перемещения поршней серв омоторов складываются на рычажиой передаче 8, в результате чего получается суммарный сигнал АЗ.
С сервомотора 5 берется обратиая связь на втулку 7 золотника. При соответствуюп1,ем выборе параметров этого сервомотора и обратной связи получается следящая система, для которой выходной сигн1ал пропорционален входному, т. е. перемещению золотника. Сервомотор 4 является астатическим.
Таки.м образом, система состоит из двух параллельных звеньев, одно из которых является статическим, (усилительным), а второе астатическ;гм (интегрирующим). С помощью такой системы реаляизуется закон регулирования, задаваемый уравнением (4).
р;С2 К:а.;.(2)
.:з /сл-; (3)
Предмет изобретения
Автоматический регулятор с параллельным включением звеньев, с иртаменанием етатического с жесткой обратной связью и астатического сервомоторов, отличающийся тем, что, с целью обеспечения регулирования по параметру и его первой производной ио временен, регулятор снабжен чувствительны:; элементом и золотником, подающим оляовременно сигнал в статический и астатический сервомоторы, выходные штоки которых связаны рычажным суммирующим механизмом№ 97216