(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ



| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1984 |
|
SU1275370A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| Система управления | 1983 |
|
SU1168896A1 |
| Адаптивное устройство компенсации эхосигнала | 1988 |
|
SU1577076A1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
| Устройство для моделирования силовыхпАРАМЕТРОВ пРОцЕССА зубОфРЕзЕРОВАНияпО МЕТОду ОбКАТКи | 1979 |
|
SU805353A1 |
| Синтезатор частоты с частотной модуляцией | 1986 |
|
SU1345343A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Анализатор экстремумов | 1983 |
|
SU1141376A1 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПЕРЕДАЧИ ЛОГИЧЕСКИХ ДАННЫХ ПО ОДНОПРОВОДНОЙ ЛИНИИ СВЯЗИ | 2001 |
|
RU2206922C2 |
1
Изобретение относится к автоматическому управлению непрерывными или полу-j непрерывными процессами, для которых ставится задача минимизации времени переходного процесса. В частности такая система может быть использована для управления летательными аппаратами, исследовательскими установками, технологическими процессами шихтоподготовки и т.п.
Известны системы автоматического управления, содержащие блок для получ&ния гиперповерхностей переключения, .вклю чающий в себя блок задания координат и модели объекта, блок формирования знака управления, связанный с блоком получения гиперповерхностей перекпюч&ния и через релейный элемент - с объектом управления 1 и 2.
Недостатками этих систем являются необходимость осуществлять дифференцирование регулируемого параметр (получать производные различного порядка),
ЧТО приводит в условиях наличия помех к резкому снижению точности, а также низкое быстродействие.
Наиболее близким техническим решением является система автоматического управления, содержащая задатчик, первый генератор тактовых импульсов, первый, второй, третий и четвертый источники опорных напряжений, последовательно соединенные релейный элемент и объект уп10равления, последовательно соединенные первую модель объекта и элемент сравнения з.
Недостатками известной системы автоматического управления являются низкая
15 точность и быстродействие.
Цель изобретения - повышение быстродействия и точности системы автомати ческого управления.
20
Поставленная цель достигается тем, что система содержит дополнительно элемент памяти, второй генератор тактовых импульсов, первый, второй, четвертый.
пятый, шестой, седьмой, восьмой импульсные элементы, последовательно соединен|{ые вторая модель объекта, блок деления, логический блок, третий импульсный элемент и фиксирующее звено нулевого порядка, выход которого через релейный эле мент и первый импульсный элемент соединен с вторьш входом первой модели объекта, выход объекта управления через; второй импульсный элемент соединен с третьим входом первой модели объекта, соединенным через элемент памяти с четвертым входом первой модели объекта, выход первого источника опорного напряжения через пятый импульсный элемент соединен с первым входом второй модели объекта, выход третьего источника опорного напряжетш через шестой тшпульсный элемент соединен с вторым входом логического блока, третий вход которого через седьмой импульсный элемент соединен с выходом четвертого источника опорного напряжения, выход задатчика через восьмой импульсный элемент соединен с вторым входом элемента сравнения, выход которого соединен с вторым входом блока деления, выход второго Источ1дака опорного напряжения через четвертый импульсный элемент и второй генератор тактовых импульсов соединен с вторьпу1И входами шестого, сед1ьмого и восьмого импульсных элементов и пятыми входами первой и второй модели объекта, выход первого генератора тактовых импульсов подключен к вторым входам первого,. второго, третьего, четвертого и пятого импульсных элементов.
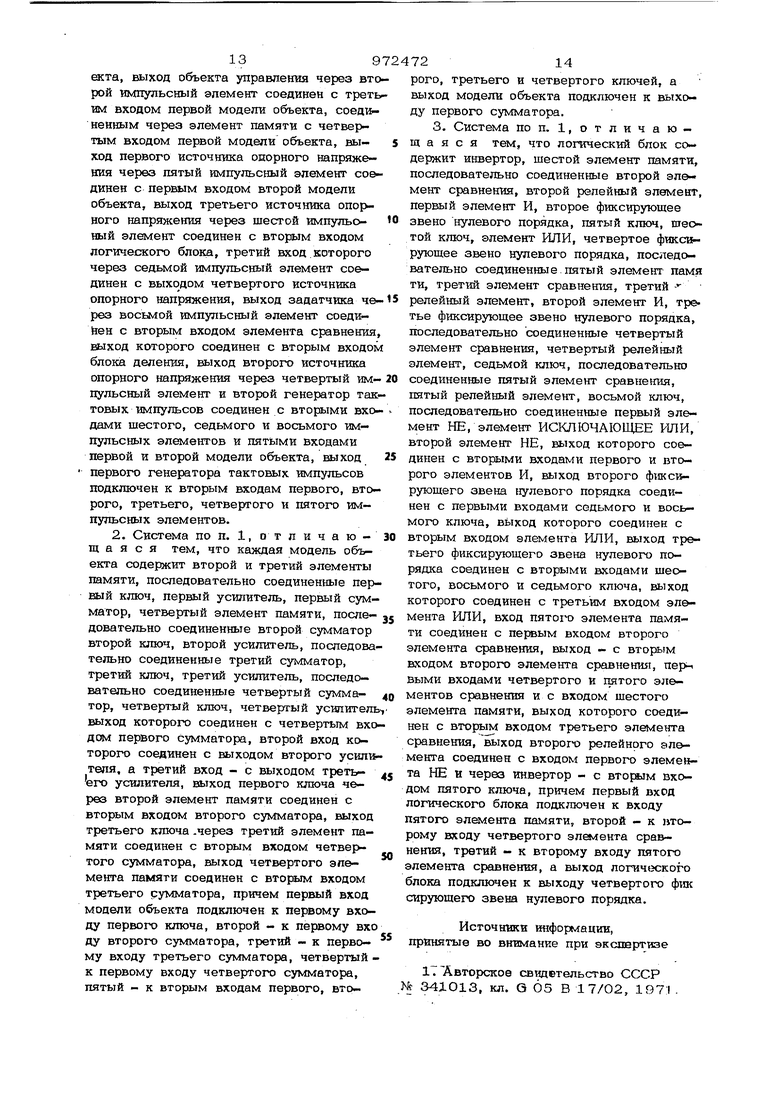
При этом каждая модель объекта содержит второй и третий элементы памяти, последовательно соединенные первый ключпервый усилитель, первый сумматор, чет вертый элемент памяти, последовательно соединенные второй сумматор, второй ключ, второй усилитель, последовательно соединенные третий сумматор, третий
ключ, третий усилитель, последовательносоединенные четвертый сумматор, четвертый ключ, четвертый усилитель, выход которого соединен с четвертым входом первого сумматора, второй вход которого соединен с выходом второго усилителя, а третий вход - с выходом третьего усилителя, ВЫХ1ЭД первого ключа через второй элемент памяти соединен с вторым входом второго сумматора, выход третьег ключа через третий элемент памяти соедивен с вторым входом четвертого суммам тора, выход четвертого элемента памяти соединен с вторым входом третьего сумматора, причем первый вход модели объекта подключен к первому входу первого ключа, второй - к первому входу второго сумматора, третий - к первому входу третьего сумматора, четвертый - к первому входу четвертого сумматора, i пятый - к вторым входам первого, второго, третьего и четвертого ключей, а выход модели объекта подключен к выходу первого сумматора, I
Кроме того, логический блок содержит
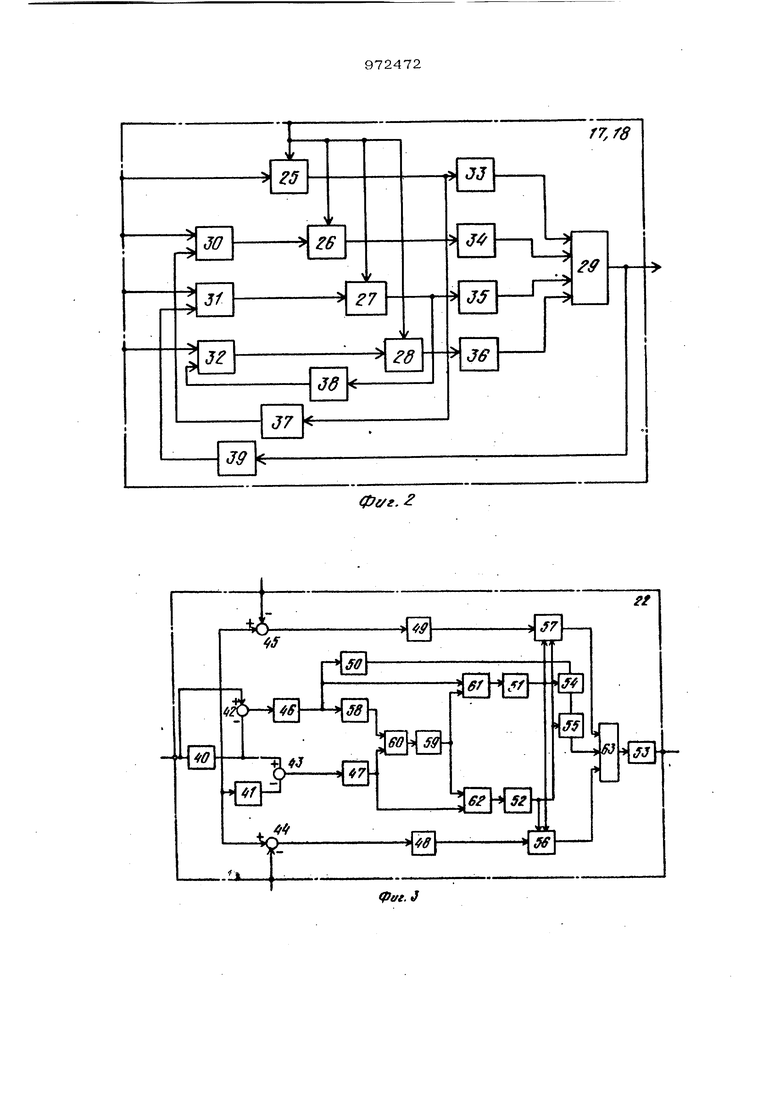
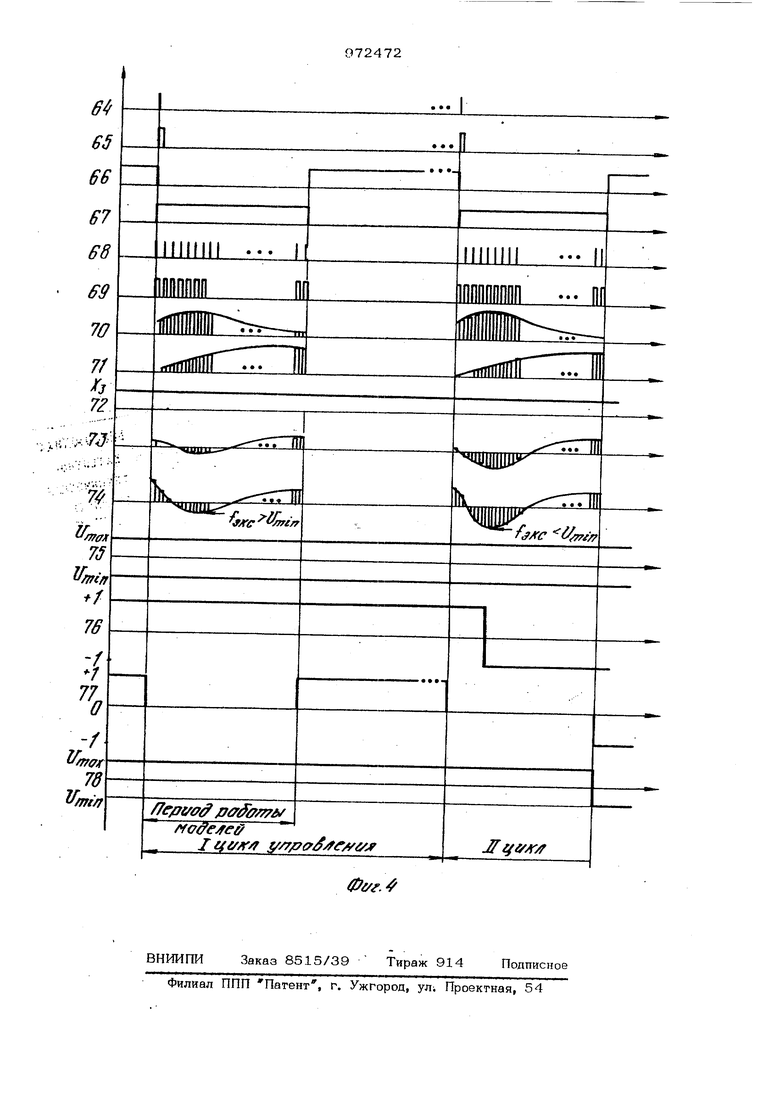
инвертор, шестой элемент памяти, последовательно соединенные второй элемент сравнения, второй релейнътй элемент,. первый элемент И, второе фиксирующее звен нулевого порядка, пятый ключ, шестой ключ, элемент ИЛИ, четвертое фиксирующее звено нулевого порядка, последовательно соединенные пятый элемент памяти, третий элемент сравнения, третий релейный элемент, второй элемент И, третье фиксирующее звено нулевого порядка, последовательно соединенные чет вертый элемент сравнения, четвертый релейнъ1й элемент, седьмой ключ, последовательно соединеннъте пятъгй элемент сравнения, пятый релейный элемент, восьмой ключ, последовательно соединенные первъ й элемент НЕ, элемент ИСШ1ЮЧАЮЩЕЕ ИЛИ, второй элемент НЕ, въгход которого соединен с вторыми входами первого и второго элементов И, выход второго фиксирующего звена нулевого порядка соединен с первыми входами седьмогои восьмого ключа, выход которого соединен с вторым входом элемента ИЛИ выход третьего фиксирующего звена нулевого порядка соединен с вторыми входами шестого, восьмого и седьмого ключа, выход которого соединен с третьим Еясодом элемента ИЛИ, вход пятого элемента памяти соединен с первым входом второго элемента сравнения, выход - с вторым входом второго элемента сравнения, первыми входами четвертого и пятого элементов сравнения и с входом шесTOJ7O элемента памяти, выход которого соединен с вторым входом третьего элемента сравнения, выход второго релейног элемента соединен с входом первого элемента НЕ и через инвертор - с вторым входом пятого ключа, причем первый вход логического блока подключен к входу пиуого элемента памяти, второй - к второму входу четвертого элемента сравн НИЯ, третий - к второму входу пятого элемента сравнения, а выход логического блока подключен к выходу четвертого фиксирующего эвена нулевого порядка. На фиг. 1 изображена структурная сх ма систег 1ьг автоматического) управления на фиг. 2 - модели объекта; на фиг. 3 модели логического блока; на фиг. 4 - временные диаграммы работы блоков сис темы. Система (фиг. 1) содержит два генератора 1 и 2 тактовых импульсов, восем импульсных элементов 3-10, четыре иоточника 11-14 опорных напряжений, эле мент 15 памяти, объект 16 управления, , первую и вторую модели 17 и 18 объекта, элемент 19 сравнения, задатчик 20, блок 21 деления, логический блок 22, ф11ксирующее звено 23 нулевого порядка и релейный элемент 24. Каждая модель 17 и 18 объекта сод жит (фиг. 2) четыре ключа 25-28, четы ре сумматора 29-32, четыре усилителя 33-36 и три элемента 37-39 памяти. Логический блок 22 содержит (фиг. 3 два элемента 40 и 41 памяти, четыре элемента 42-45 сравнения, четыре релейных элемента 46-49, инвертор 50, три фиксируюпшх звена 51-53 нулевого порядка, четыре коюча 54-57, два элемента НЕ 58 и 59, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 60, два элемента И 61 и 62 и элемент ИЛИ 63. На временной диаграмме (фиг. 4) представлены тактовые импульсы 64 пер вого генератора 1, импульсы 65 на Bbi- ходах первого и второго импульсных элементов 3 и 4, сигналы 66 на выходе третьего импульсного элемента 5, сигналы 67 на выходах четвертого и пятого импульсных элементов 6 и 7, тактовые импульсы 68 второго генератора 2, последовательность импульсов 69 на выходах шестого, седьмого и восьмого импульсных элементов 8-10, последовательность импульсов 70 на выходе .первой модели объекта 17, последовательность импульсов 71 на выходе второй модели объекта 18, сигнал 72 на выходе задатчика 20, последовательность импульсов 73 на выходе элемента 19 сравнения, последовательность импульсов 74 lia выходе блока 21 деления, постоянное напряжение 75 на третьем и четвертом источниках 13 и 14 опорного напряжения, сигнал 76 на выходе логиче кого блока 22, сигнал 77 на выходе фиксирующего звена 23 нулевого порядка, сигнал 78 на входе объекта 16 у равления. Введение в систему второй модели 18 объекта, первый вход которой через пятый импульсный элемент 7 подключен к nepBtJMy источнику 11 опорного напряжения 11, пятый вход - к второму генератору 2 тактовых импульсов (второй - четвертый входы этой модели не задействованы, так как на них нулевые сиг налы), а выход - к второму входу блока 21 деления, позволяет подавать на второй вход блока 21 деления последовательность сигналов X. (t), Ж 1,2, 3которые представляют собой дно- . кретный аналог непрерывной функции Х (-t ) - функнии разгона объекта. Соответствие X. (кп) - дискретный аналог X. (-t ) имеет место вследствие того, что на первом источнике 11 опорного напряжения присутствует постоянный сигнал единичного напряжеН1ш, Подключение второго и третьего входов первой модели 17 к входу и выходу объекта 16 управления через первый и второй импульсные элементы 3 и 4, связь четвертого выхода с вторым импульсным элементом 4 через элемент памяти 15, дают возможность получить на выходе модели дискретную последовательностгт сигналов XQ(), 1,2, 3,... - аналог непрерывной функции Xp(-L), представляющей собой прогноз гвменения выходной координаты объекта при подаче в текущий момент времени нулевого сигнала управления (снятие управления), так как первый вход первой модели 17 не задействован (заземлен). Соединение выхода первой модели 17 с вторым входом элемента 19 сравнения, первый вход которого связан через восьмой импульсный элемент 10с задатчигком 2О, а выход подключен к первому входу блока 21 деления, позволяет получить на первом входе блока 21 деления последовательность сигналов X, -X.j(ni), rv| 1,2,3..., где Х соив-t - постоянный сигнал на выходе задатчика 20. Использование блока 21 деления дает возможность получить на его выходе последовательность ( УМ) Ур( , .т 1,2,3....( Применение логического блока 22, первый вход которого связан с блоком 21 деления, а второй и третий - с третьим и четвертым источниками опорного напряжения через шестой и седьмой импульоные элементы 8 и 9 соответственно, позволяет осуществить анализ характера последователыюсти f (vvi) на предмет
монотонности или наличия экстремумов, сравнттгь полученные экстремумы с величинами предельно допустимых управляющих воздействий {на третьем источнике 13 постоянное напряжение равно максимально возможная величина управляющего воздействия, на четвертом .минимально возможная величина).
Подключение логического блока 22 к релейному элементу 24 через третий импульсный элемент 5 и фиксирующее звено 23 нулевого порядка дает возможность осуществлять переключение величины управления в нужный момент времени.
Таким образом, в данной системе на выходе блока 21 деления, имеется последовательность сигшлов
()-.il (-0
лДум)
которая представляет собой дискретный аналог непрерывной функшга ,. Хг-Уо)
(t)--LO.)
.XiCt)
Каждое значение этой функции представляет собой величину управления, которую надо приложить к объекту 16 управления, чтобы по истечении определенного времени его выходная координата X достигла заданного значения У о,. Действительно, зафиксируем момент времени -fc -i. Тоз да VI3 уравнения (2) получим
г-)о1-ь-1)5(-ьОхЛ 1) Сг)
С другой стороны, cojvmcHo пришипа суперпозишга реакцию линейного объекта на управление U COhst можно записать в виде
(-Ь)--ХоС-Ь)-ЮХ(Ъ), с 4;
где Х (-fe ) и XQ( t ) - функция разгона (вынужденная составляющая переходного процесса) и свободная составляющая переходного процесса (реакция объекта при текущем его состоянии на нулевое управление). Если поставить условия, чтобы в момент -t -fc).координата X достигла заданной величины, т.е. X (-t,) Х , то из (4) получим уравнение, эквивалентное .выражению (3). Таким образом 5 верждение доказано.
Отсюда следует, что если функция fCi) содержит экстремум при t i ,- (;,)fg в котором ее производная обращается в нуль, то реализация на объекте управления и обеспечивает вывод координаты на заданный уровень за время t с нулевой скоростью. Аналогично, если функция f (-t ) (или ее дискретный .аналог) имеет экстремальное значение,
равчрё wiM свидетельствует о том, UTO для достижения максимального быстродействия на объект надо подавать управление ,, . Функцию этого анализа и выработки управ ляющего воздействия и осуществляет ло- ШЧеский блок 22. Использование двух моделей 17 и 18 позволяет получить дискретные последовательности, реализующие свободную и вынужденную составляющие переходного процесса. Система автоматического управления работает циклически. Каждый цикл работы начитается с выработки генератором 1 тактового импульса, который обеспечивает кратковременное замыкание первого и BTopoi o импульсных элементов 3 и 4, более длительное замыкание четвертого и пятого импульсных элементов 6 и 7. размыкание нормально замкнутого третьего импульсного элемента 5 (позиции 64-67 на фиг. 4). Первые два импульсных элемента 3 и 4 и элемент 15 памяти обеспечивают установку начальных условий на первой модели 17 объекта, соответствующих текущему состоянию объ екта 16 управления. На первы с входах первой и второй моделей 17 и 18 объекта в это время присутствует соответственно нулевой и единичный сигнал управления. Четвертый импульсный элемент 6, срабатывая, запускает второй генератор 2, вырабатывает тактовые импульсы с частотой, на несколько порядков большей частоты первого генератора 1. Эти импульсы поступают на пятый вход моделей 17 и 18 объекта и обеспечивают их работу в ускоренном масщтабе времени. При этом с частотой второго генератора 2 на выходе первой модели 17 объекта появляются импульсы Xp(rTt,), m 1,2,3,... с изменяющейся амплитудой, моделирующие свободное движение объекта (позиция 70), а на вы:ходе второй модели 18 объекта - X (vvi )соответствующие функшга разгона объекта (реакции объекта на единичное управление при нулевых, начальных условиях). Импульсы Xp(ni) последовательно поступают на первый вход элемента 19 сравнения, на второй вход которого синхронно, благодаря восьмому импульсному элементу 10, который управляется вторым генератором 2, поступают импульсы, амплитуда которых соответствует сигналу задания Ха. Выходные импульсы элеме№та 19 сравнения, a ШIИтyдa котор тх соответствует разности Х, -Х(), подаются на второй вход блока 21 деления. на первый вход которого синхронно посту пают импульсы Х (гл), а на выходе такил образом получаем последовательност импульсов f (уи) (w (позиция 74).() Эти импульсы последовательно поступают на первый вход логического блока .22, на второй и третий вход которого поступают импульсы, амплитуда которых равна максимально и минимально возможным значениям управления (позишш 75). Логический блок анализирует последовательность f (w ) на предмет наличия экстремума. Если находят экстремуммаксимум, величина которого больше /или минимум, меньший , то логичес кий блок 22 вырабатывает соответственно сигнал +1 или -1. В противном случае блок вырабатывает противоположный по величине сигнал. Если экстремум не найден, логический блок 22 вырабатывает + 1, если последовательность С / монотонно убывающая, и -1, если возрастающая. На временных диаграммах (фиг. 4) предсгавпены два последовательных цикла управления. При этом на первом цикле последовательность (VM) (позиция 74) содержит минимум, который не достигает предела и , а на втором такте минимальное значение последовательности меньше Ujy,,. Соответственно логический блок 22 изменяет свой выходной сиг нал с +1 на -1 на втором цикле при обнаружении экстремума (позиция 76). Когда третий импульсный элемент 5 замыкается, на фиксирующее звено 23 пода ется -1, и релейный элемент 24 устаIнавливает на входе объекта управление ШИ которое поддерживается до тех пор, пока логический блок 22 не вырабатывает сигнал +1. Каждая модель объекта работает следующим образом. В мсмент, когда на пятый вход модели поступает тактовый импульс от второго генератора 2, срабатывают ключи 25-28. При этом сигнал с первого входа модели поступает через усилитель 33 на первый вход первого сумматора 29, а сигналы с второго - четвертого сумматоров ЗО-32 через соответствующие усилители 34-36 поступают на второй четвертый входы первого сумматора 29. Кроме того, сигналы с входов первого и третьего усилителей 33 и 35 и выходной сигнал с первого сумматора 29 поступают на второй, третий и четвертый элементы 37-39 памяти соответственно которые работают с небольшой задержкой. Зафискированные в элементах 37-39 памяти сигналы используются на следующем такте работы. Таким образом, описанная модель реалвзуер рекуррентную формуду ..... U)).Ci-t) КзХС1Н)ц-К4Х(1-), Сб) где К, К, К, К - коэффициенты усилешю усилителей 34-36; X(i),XCi-i),X(i-2;- сигналы на выходе первого сумматора 29 на текущем и двух предшествующих тактах работы второго генератора; Ci),VCf-i) - сигналы на выходе первого ключа 33 на текущем и предшествующем такте. Сигнал Х( 1 ) на следующем такте ста1НОВИТСЯ сигналом Х( 1 -1), Х( 1-1) становится Х( i -2), а V d ) - V ( -1 -1) Формула (5) реализует дискретную модель динамического звена второго порядка. При необходимости апроксимировать объект более высоким порядком, описанные звенья соединяются последовательно. В предлагаемой системе автоматического управлешш на первый вход первой модели 17 объекта подается постоянно нулевой сигнал, а на второй - четвертый входы, в начале каждого такта, подаются сигналы, соответствующие текущ11м значениям входа и выхода объекта и 1Л1хода объекта на предшествующем такте. Таким образом, в начале каждого цикла первая модель 17 объекта устанавливается в то состояние, в котором находится ofibект управления, а ее выход Х( i ) обрюзу ет последовательность, соответствующую свободной составляющей процесса. Аналогично, на первый вход второй модели 18 объекта подается единичный сигнал (имитируя единичное управляющее воздействие),а посредством второго - четвертого входов в начале каждого цикла устанавливаются нулевые начальные уело.в;ш. Таким образом на ее выходе получаем последовательность, соответствующую Х (П). Логический блок 22 работает следующим образом. На первом входе блока последовагельгно (с частотой, задаваемой вторым rt нератором 2 тактовых импульсов) гюявляются импульсы i(), амплитуда коорых определяется формулой (1). При постуттлении очередного импульса его амлитуда запгалинается в пятом элементе 0 памяти и сравняется на втором элеенте 42 сравнения с амплитудой пре- 5
ыдугце го импульса. В зависимости от того, положительная эта разность (последовательность возрастающая) или отрицательная (последовательность убыващая), второй релейный элемент 46 вы- рабатывает сигнал -fl или -1. Первый сигнал считается логической единицей, второй - логическим нулем. Этот сигнал на инверторе 50 изменяется на противооложный и через нормально замкнутые пятый и шестой ключи 54 и 55 попадает на схему ИЛИ 63 и запоминается на четвертом фиксирующем элементе 53. Таким образом осуществляется анализ онотонной последовательности.20
При приходе очередного -i -го имлуль- са на первый вход логического блока, на втором элементе 42 сравнения вычисляется разность i(i)- (i-1),а на третьем элементе 43 ( -i -1) - (i-2) Если эти разности имеют разный знак, это свидетельствует о том, что величина экстремальная. При этом на обоих входах элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 60 будут или логические нули или логичво- кие единицы, т.е. на выходе элемента во - логический нуль, а на выходе второго элемента НЕ 59 - логическая единица, которая поступает на входы двух элементов И 61 и 62. При этом логи- 35 ческая единица появляется на выходе первого элемента И 61, если найденный экстремум - максимум, и на выходе второго элемента И 62 - если минимум. Соответствующий элемент И через фикси- 40 рующее звено 51 или 52 размыкает один из ключей 54 или 55. Это свидетельствует о том, что если найден хоть один экстремум, то анализ на монотонность не производится. Одновременно соответ- 45 ствующее фиксирующее звено подготавливает цепь анализа величины экстремума второе фиксирующее звено 51 замыкает третий ключ 56 и размыкает четвертый ключ 57, если логическая единица будет j на выходе третьего фиксирующего звена 52, то действие будет обратное.
Амплитуда найденного экстремального импульса анализируется на четвертом и пятом элементах 44 и 45 сравнения, где она сравнивается с )( и Uy,, ответственно.
Такое решение логического блока дает возможность фиксировать все появляющиеся экстремальные значения последовательности ( ш ), а подключение логического блока 22 к фиксирующему звену 23 через третий импульсный элемент 5 позволяет подавать на релейный элемент 24 результата анализа последнего ю найденных экстремумов на текущем цикле управления. Таким образом, предлагаемая система позволяет определить, является ли текущий момент времени моментом переключения.
Частота работы первого тактового генератора 1 выбирается, исходя из динамических свойств объекта (в большинстве случаев в течение переходного процесса должно быть 30-40 циклов управления), частота работы второго генератора 2 выбирается в 50-100 раз большей. Интервал прогноза С , осуществляемого быстрыми моделями 17 и 18, определяется по формуле Т К, где Т период расчета управляющих воздействий (период работы первого тактового генератора), К - отношение частоты второго генератора к частоте первого (кратность второго генератора).
Данная система позволяет осуществля оптимальное по быстродействию управление без необходимости дифференцирования управляемой координаты, измерять промежуточные координаты объекта или вычислять состояние объекта в фазовых пространствах в текущий момент времени со скользящим интервалом оптимизации.
Формула изобретения
гб
/
jff
