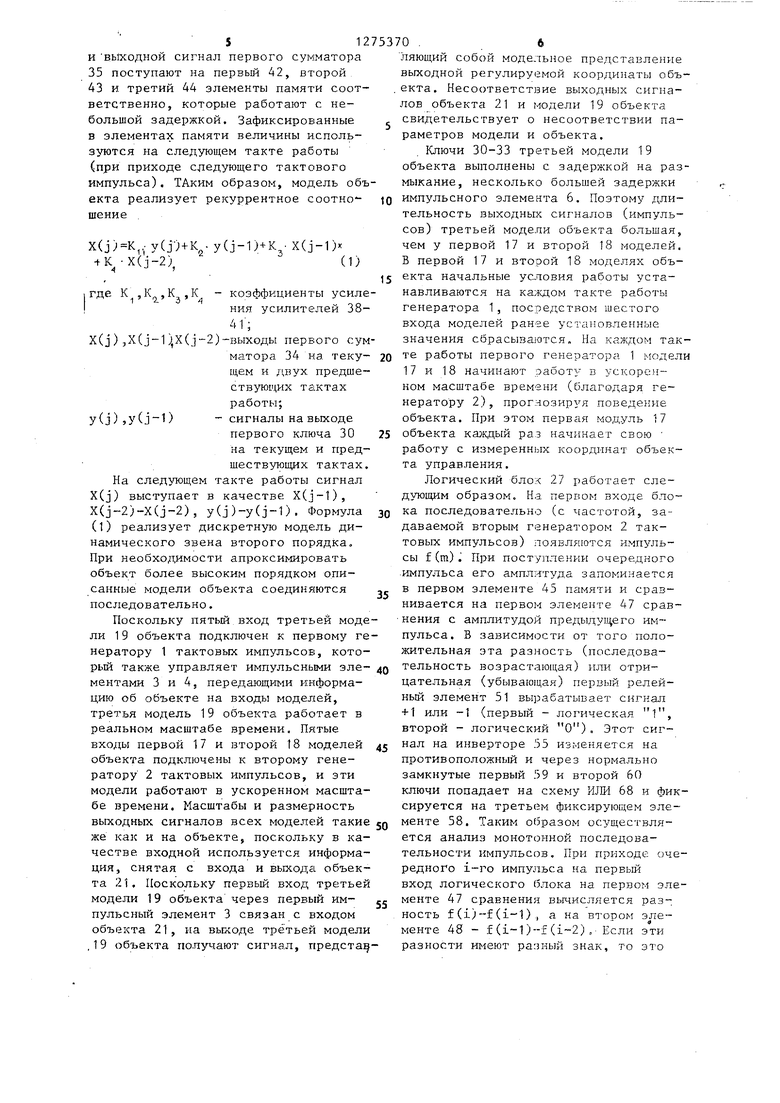
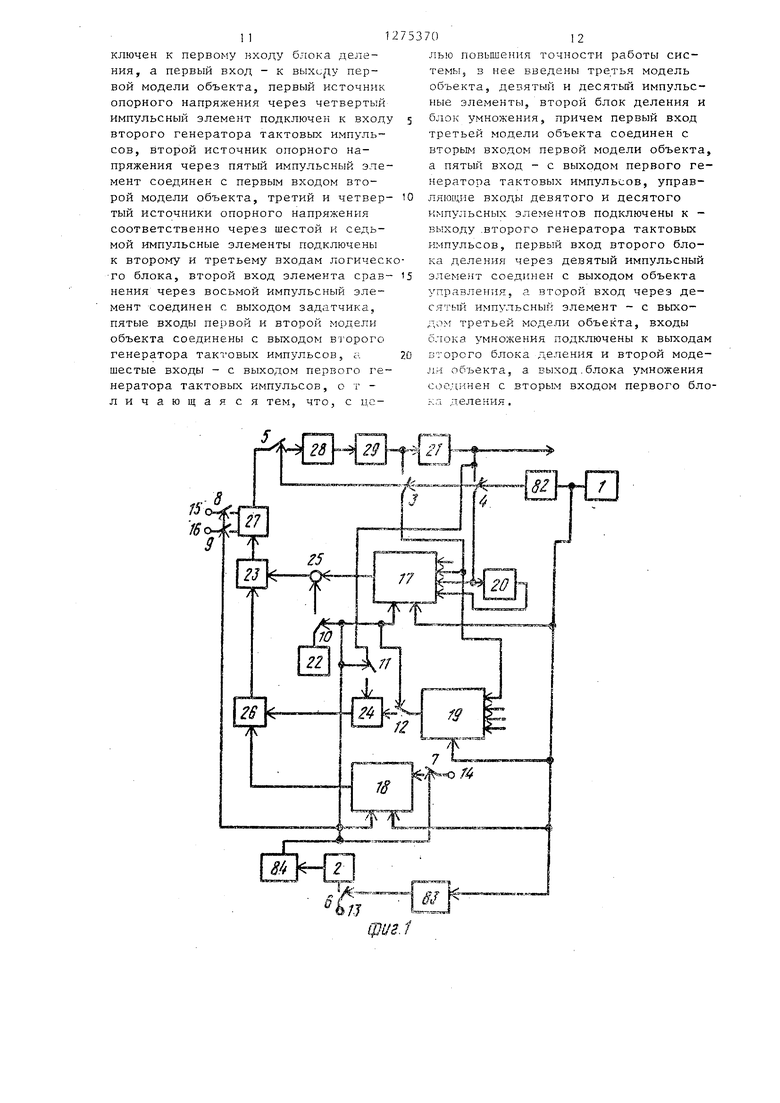
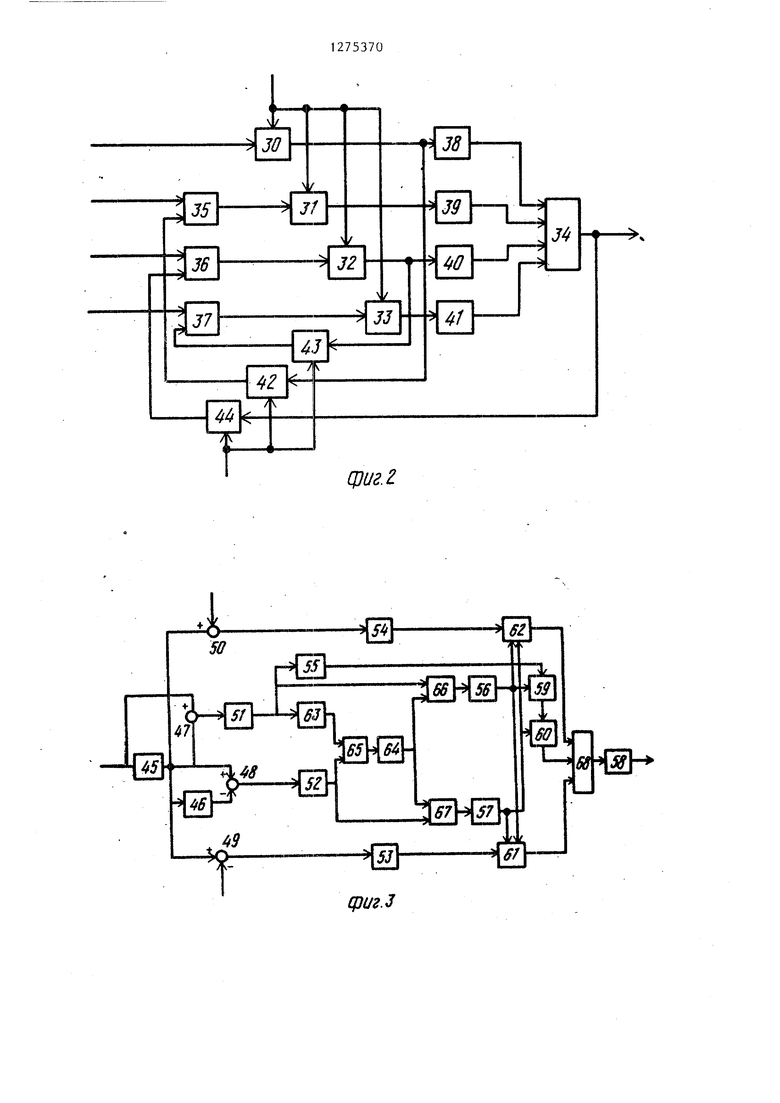
Изобретение относится к автоматическому управлению непрерывными или полунепрерывными технологическими процессами, для которых ставится зад ча минимизации времени переходного процесса. Целью изобретения является повышение точности работы системы автома тического управления путем обеспечения компенсации несоответствия коэффициентов передач моделей объекта управления и самого объекта управления. На фиг. 1 представлена структурна схема системы автоматического управления; на фиг. 2 - пример реализации моделей объекта-, на фиг. 3 - пример реализации блока логики; на фиг. 4 временные диаграммы работы устройства Устройство содержит первый 1 и второй 2 генераторы тактовых импульсов. Десять импульсных элементов 3четыре источника 13-16 опорных напряжений, первую 17, вторую 18 и третью 19 модели объекта, элемент 20памяти, объект 21 управления, задатчик 22, первый 23 и второй 24 блоки деления, элемент 25 сравнения блок 26 умножения, логический блок 27, фиксирующее звено 28 и релейный элемент 29, причем управляющие входы первого 3, второго 4, третьего 5 и четвертого 6 импульсных элементов подключены через одновибраторы к выходу первого генератора 1 тактовых импульсов, а управляющие входы остал ных - к выходу второго генератора 2 тактовых импульсов, выход логического блока через последовательно соединенные третий импульсный элемент 5, фиксирующее звено 28 и релейный элемент 29 подключен к йходу объекта 21управления, первый вход логического блока 27 соединен с выходом первого блока 23 деления, а второй и третий входы логического блока 27 подключены через шестой 8 и седьмой 9 импульсные элементы к третьему 15 и четвертому 16 источникам опорного напряжения, первый вход первого блока деления соединен с выходом элемента 25 сравнения, а второй вход с выходом блока 26 умножения, входы которого связаны с выходами второго блока 24 деления и второй модели 18 объекта, выход первого генератора 1 тактовьЬс импульсов подключен к шестым входам первой 17 и второй 18 моелей объекта и к пятому входу третьей модели 19 объекта, вьпсод второго генератора 2 тактовых импульсов соединен с пятыми входами первой 17 и второй 18 моделей объекта, а вход через четвертый импульсный элемент 6 с первым источником 13 опорного напряжения, второй и третий входы модели 17 объекта связаны с входом и выходом объекта 21 управления через первый 3 и второй 4 импульсные элементы соответственно, четвертый вход соединен с выходом второго импульсного элемента 4 через элемент 20 памяти, а выход первой модели 17 объекта соединен с первым входом элемента 25 сравнения, второй вход которого связан с выходом задатчика 22 через восьмой импульсный элемент 10, первый вход третьей модели 19 объекта подключен к выходу первого импульсного элемента 3, а ее выход через десятый импульсный элемент 12 к второму входу второго блока 24 деления, первый вход которого через девятый импульсный элемент 11 подключен к выходу объекта 21 управления, первый вход второй модели 18 объекта соединен с вторым источником 14 опорного напряжения через пятый импульсный элемент 7, причем неназванные номера входов моделей 17-19 объекта не задействованы. Каждая из моделей 17-19 объекта (фиг. 2) содержит четыре ключа 3033, четыре сумматора 34-37, четыре усилителя 38-41 и три элемента 4244 памяти, причем первый вход модели объекта через последовательно соединенные первый ключ 30 и первый усилитель 38 подключен к первому входу первого сумматора 34, второй вход через последовательно соединенные второй сумматор 35, второй ключ 31 . и второй усилитель 39 подключен к второму входу сумматора 34, третий вход - через последовательно соединенные третий сумматор 36, третий ключ 32 и третий усилитель 40 подключен к третьему входу сумматора 34, четвертый вход через последовательно соединенные четвертый сумматор 37, четвертый ключ 33 и четвертый усилитель подключен к четвертому входу с-умматора 34, пятый и шестой входы модели блока объекта соединены с эответственно с управляющимивходами ключей 30-33 и с входами сброса элементов 43 и 44 памяти, вход первого усилителя через первый элемент 42 памяти подключен к второму входу второго сумматора 35, вход третьего усилителя 40 через второй 43 элемент памяти - к второму входу четвертого 37 сумматора, выход первого 34 сумматора, являющийся выходом модели объекта, подключен через третий элемент 44 памяти к второму входу третьего сумматора 36.
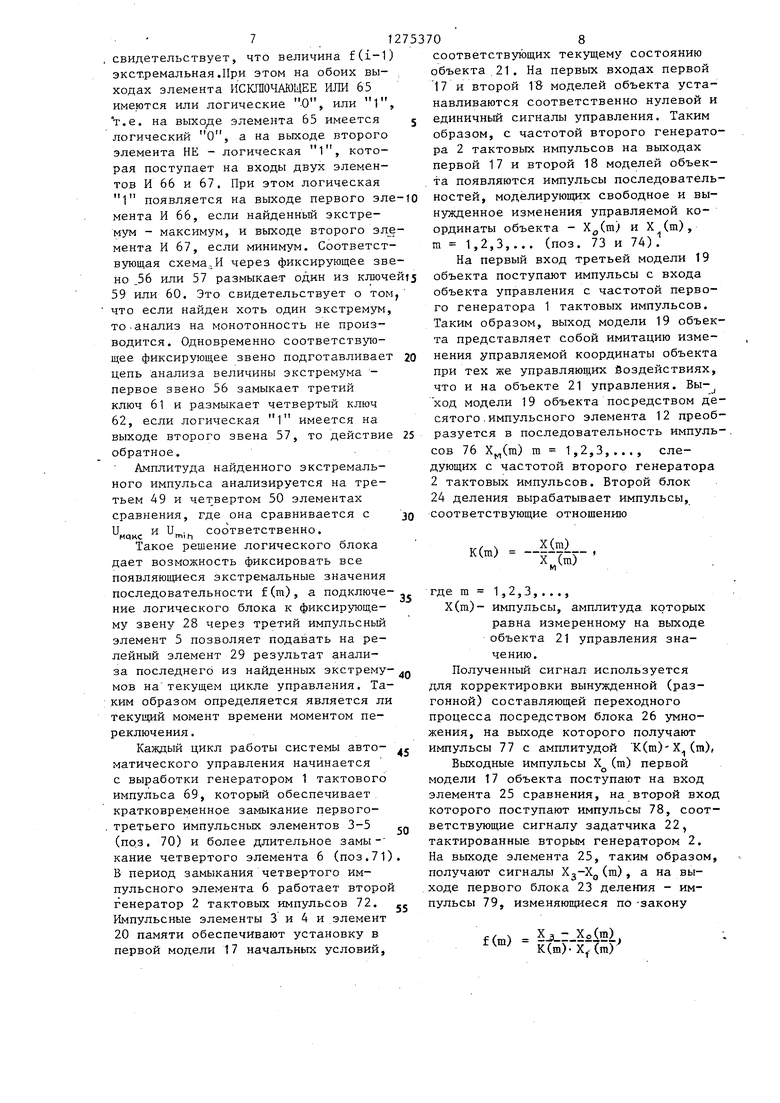
Логический блок 27 (фиг, 3) содержит два,элемента 45 и 46 памяти, четыре элемента 47-50 сравнения, четыре релейных элемента 31-54, ийвертор 55, три фиксирующих звена (нулевого порядка) 56-58, четыре ключа 59-62, два элемента НЕ 63 и 64, ИСЮТЮЧАЮЩЕЕ ИЛИ 65, два элемента И 66 и 67 и элемент ИЛИ 68. Выход первого элемента 45 памяти подключен к входу второго элемента 46 памяти, второму входу первого 47 и первым входам второго 48, третьего 49 и четвертого 50 элементов сравнения, вход первого элемента 45 памяти соединен с первым входом первого элемента 47 сравнения, а выход второго элемента 46 памяти - с вторым входом второго элемента 48 сравнения, выходы третье го 49 и четвертого 50 элементов сравнения через последовательно соединенные соответствующие релейные элементы и ключи подсоединены к двум входа элемента ИЛИ 68. Выходы первого 47 и второго 48 элементов сравнения подключены к соответствующим релейным элементам 51 и 52, выход первого из которых через последовательно соединенные инвертор 55, первый 59 и второй 60 ключи связан с третьим входом элемента ИЛИ 68. Кроме того, выход первого релейного элемента 51 через первый элемент НЕ 63 соединен с одним из входов элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 65, другой вход которого связан непосредственно с выходом второго релейного элемента 55. Выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 65 через второй элемент НЕ 64 подключен к входам пер вого 66 и второго 67 элементов И, вторые входы которых связаны с выходами соответствующих релейных элементов. Выход первого элемента И 66 через первое фиксирующее звено 56 соединен с управляющим входом первого ключа 59, вторым управляющим входом третьего 61 и первым четвертого 62 ключей. Аналогично выход второго элемента И 67 через второе фиксирующее звено 57 соединен с управляющим входом второго 60 ключа, первым управляющим входом третьего 61 и вторым четвертого 62 ключей. Выход элемента ИЛИ 68 соединен с входо третьего фиксирующего звена 58.
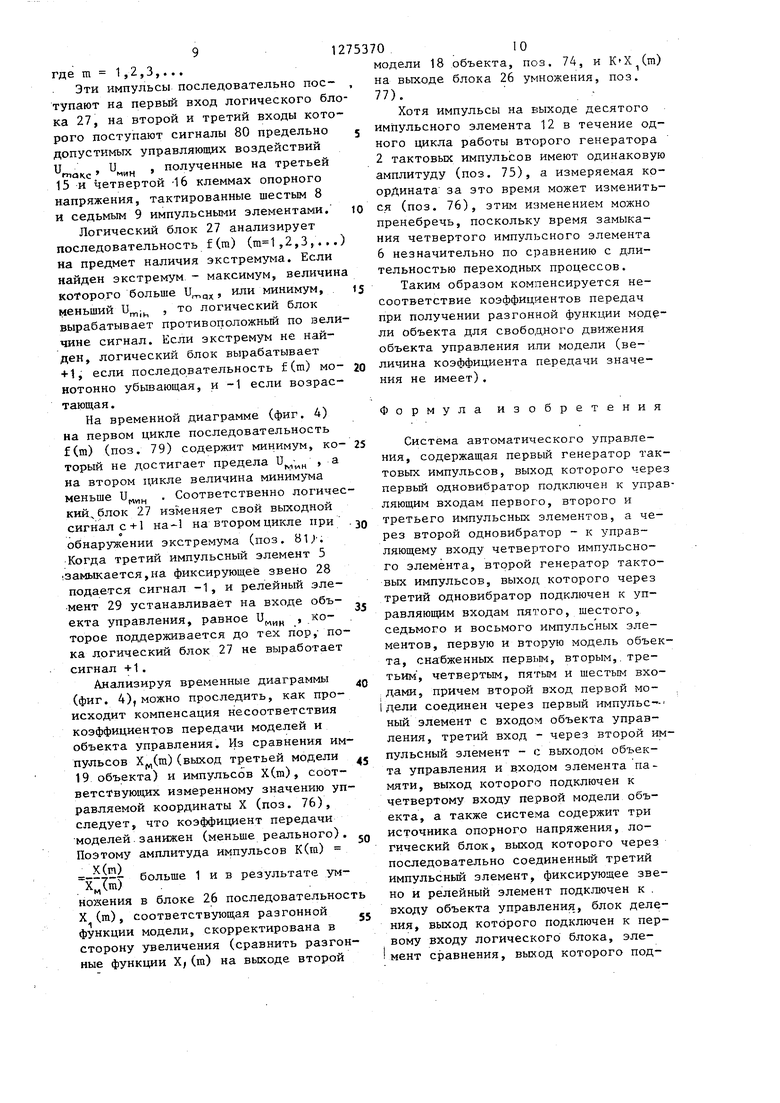
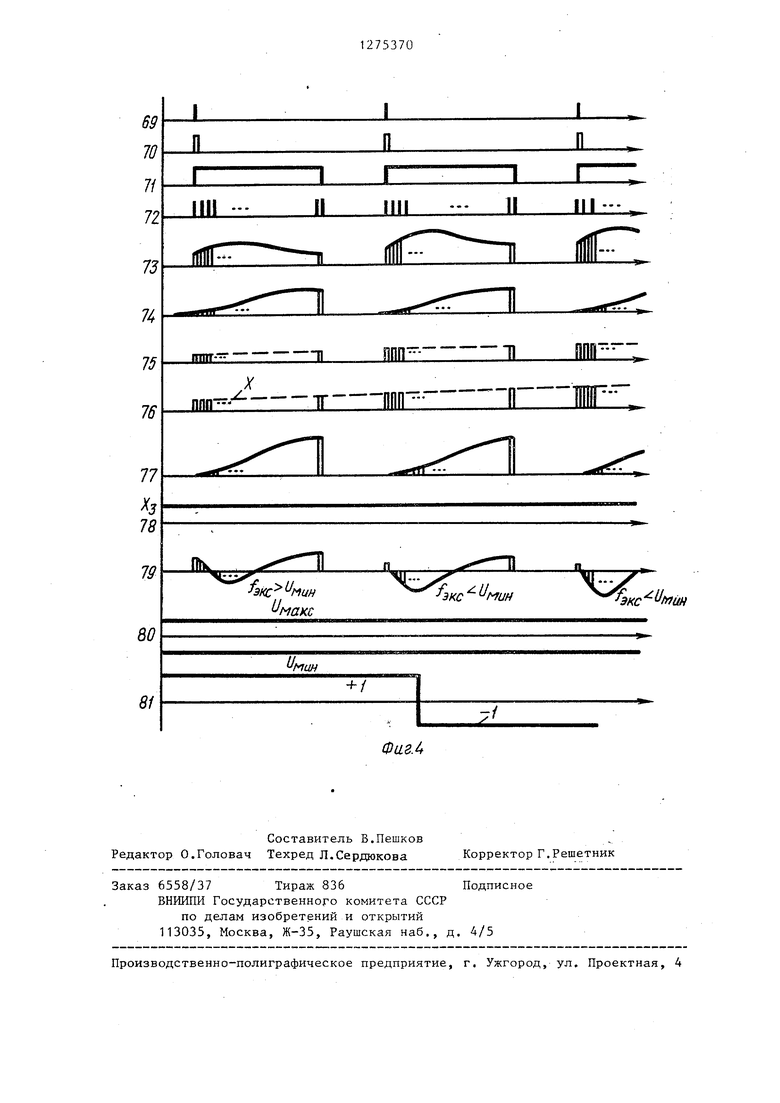
На временной диаграмме работы (фиг. 4) устройства для двух тактов управления обозначено: 69 - тактовые импульсы первого генератора, 70 период срабатывания первого-третьего импульсных элементов 3-5; 71 - период срабатывания четвертого импульсного элемента 6; 72 - тактовые импульсы второго генератора 2, 73 типичная последовательность импульсов на выходе первой модели 17; 74 то же, на выходе второй модели 18, 75 - то же, на выходе де сятого импульсного элемента 76 - то же, на первом входе второго блока 24 деления j 77 - то же, на выходе блока 26 умножения; 78 - сигнал на выходе задатчика 22; 79 - последовательност импульсов на выходе блока 23 деления 80 - постоянные сигналы на третьей 15 и четвертой 16 клеммах опорного напряжения; 81 - сигнал на выходе логического блока 27.
Посредством первого 82, второго 83 и третьего 84 одновибраторов устанавливается период срабатывания импульсных элементов 3-12, выполненных, например, на электронных .ключах Система автоматического управлени работает следующим образом.
Управление циклами формирования сигнала управления осуществляется генератором 1 тактовых импульсов, а синхронизация работы блоков в течение одного цикла - генератором 2 тактовых Импульсов.
Каждая из моделей 17-19 объекта работает следующим образом. В момент когда на пятый вход модели поступает тактовый импульс от генератора тактовых импульсов, срабатывают ключи 30-33. При этом сигнал с первого входа модели поступает через усилитель 38 на первый вход первого сумматора 34, а сигналы с второго-четвертого сумматоров 35-37 через соответствующие усилители 39-41 - на второй четвертый входы первого сумматора 34. Кроме того, сигналыс входов первого 38 и третьего 40 усилителей и выходной сигнал первого сумматора 35 поступают на первый 42, второй 43 и третий 44 элементы памяти соответственно, которые работают с небольшой задержкой. Зафиксированные в элементах памяти величины используются на следующем такте работы (при приходе следующего тактового импульса). ТАКИМ образом, модель объ екта реализует рекуррентное соотно шениеX(j)K,.- y(j-) + K y(j-1)+K X(j-1)x K-X(j-2)(1) I где К ,K ,К ,К - коэффициенты усиле Iния усилителей 38X(j) jXCj-l ),Х(-2)-выходы первого сум матора 34 на текущем и двух предшествующих тактах работы; y(j)) сигналы на выходе первого ключа 30 на текущем и предшествующих тактах. На следующем такте работы сигнал X(j) выступает в качестве X(j-1), X(j-2)-X(j-2), y(j)-y(j-1). Формула (О реализует дискретную модель динамического звена второго порядка. При необходимости апроксимировать объект более высоким порядком описанные модели объекта соединяются последовательно. Поскольку пятый вход третьей моде ли 19 объекта подключен к первому ге нератору 1 тактовых импульсов, который также управляет импульсными элементами 3 и 4, передающими информацию об объекте на входы моделей, третья модель 19 объекта работает в реальном масштабе времени. Пятые входы первой 17 и второй 18 моделей объекта подключены к второму генератору 2 тактовых импульсов, и эти модели работают в ускоренном масштабе времени. Масштабы и размерность выходных, сигналов всех моделей такие же как и на объекте, поскольку в качестве входной используется информация, снятая с входа и выхода объекта 21. Поскольку первый вход третьей модели 19 объекта через первый импульсный элемент 3 связан с входом объекта 21, на выходе третьей модели ,19 объекта получают сигнал, предстад ляющий собой модельное представление выходной регулируемой коорди}1ать объекта. Несоответствие выходных сигналов объекта 21 и модели 19 объекта свидетельствует о несоответствии параметров модели и объекта. Ключи 30-33 третьей модели 19 объекта выполнены с задержкой на размыкание, несколько большей задержки импульсного элемента 6. Поэтому длительность выходных сигналов (импульсов) третьей модели объекта большая, чем у первой 17 и второй 18 моделей. В первой 17 и второй 18 моделях объекта начальные условия работы устанавливаются на ка;кдом такте работы генератора 1, посредством шестого входа моделей ранее установленные значения сбрасываются. На каждом такте работы первого генератора 1 модели 17 и 18 начинают работу в ускоренном масштабе времени (благодаря генератору 2), прогнозируя поведе1;ие объекта. При этом первая модуль 17 объекта каждый раз нач гнает свою работу с измеренных координат объекта управления. Логический блок 27 работает следующим образом. На первом входе блока последовательно (с астотой, задаваемой вторым генератором 2 тактовых импульсов) появляются импульсы f(m). При поступлении очередного импульса его амплитуда запоминается в первом элементе 45 памяти и сравнивается на первом элементе 47 сравнения с амплитудой предыдущего импульса. В зависимости от того положительная эта разность (последовательность возрастающая) или отрицательная (убывающая) первый релейный элемент 51 вырабатывает сигнал H-l или -1 (первый - логическая 1, второй - логический О). Этот сигнал на инверторе 55 изменяется на противоположный и через нормально замкнутые первый 59 и второй 60 ключи попадает на схему И1Ш 68 и фиксируется на третьем фиксирующем элементе 58. Таким образом осуществляется анализ монотонной последовательности импульсов. При приходе очередного i-ro импульса на первый вход логического (5лока на первом элементе 47 сравнения вычисляется разность f(i)f(i-1), а на втором элементе 48 - f(i-l)-f(), Если эти разности HbiewT разный знак, то это свидетельствует, что величина f(i-1 экстремальная.При этом на обоих выходах элемента ИСКШОЧАЮЩЕЕ ИЛИ 65 имеются или логические -О, или 1 т.е. на элемента 65 имеется логический О, а на выходе второго элемента НЕ - логическая 1, которая поступает на входы двух элементов И 66 и 67, При этом логическая 1 появляется на выходе первого эл мента И 66, если найденный экстремум - максимум, и выходе второго эл мента И 67, если минимум. Соответст вующая схема.. И через фиксирующее зв но 56 или 57 размыкает один из ключ 59 или 60. Это свидетельствует о том что если найден хоть один экстремум то.анализ на монотонность не производится. Одновременно соответствующее фиксирующее звено подготавливает цепь анализа величины экстремума первое звено 56 замыкает третий ключ 61 и размыкает четвертый ключ 62, если логическая 1 имеется на выходе второго звена 57, то действие обратное. Амплитуда найденного экстремального импульса анализируется на третьем 49 и чет вертом 50 элементах сравнения, где она сравнивается с MQKc mih соответственно. Такое решение логического блока дает возможность фиксировать все появляющиеся экстремальные значения последовательности f(m), а подключение логического блока к фиксирующему звену 28 через третий импульсный элемент 5 позволяет подавать на релейный элемент 29 результат анализа последнего из найденных экстрему- MOB натекущем цикле управления. Таким образом определяется является ли текущий момент времени моментом переключения . Каждый цикл работы системы автоматического управления начинается с выработки генератором 1 тактового импульса 69, который обеспечивает кратковременное замыкание первого. третьего импульсных элементов 3-5 (по.з. 70) и более длительное замыкание четвертого элемента 6 (поз.71) В период замыкания четвертого импульсного элемента 6 работает второй генератор 2 тактовых импульсов 72. Импульсные элементы 3 и 4 и .элемент 20 памяти обеспечивают установку в первой модели 17 начальных условий. соответствующих текущему состоянию объекта 21. На первых входах первой 17 и второй 18 моделей объекта устанавливаются соответственно нулевой и единичный сигналы управления. Таким образом, с частотой второго генератора 2 тактовых импульсов на выходах первой 17 и второй 18 моделей объекта появляются импульсы последовательностей, моделирующих свободное и вынужденное изменения управляемой координаты объекта - Х(т) и X (т), m 1,2,3,... (поз. 73 и 74). На первый вход третьей модели 19 объекта поступают импульсы с входа объекта управления с частотой первого генератора 1 тактовых импульсов. Таким образом, выход модели 19 объекта представляет собой имитацию изменения управляемой координаты объекта при тех же управляющих йоздействиях, что и на объекте 21 управления. Выход модели 19 объекта посредством десятого .импульсного элемента 12 преобразуется в последовательность импуль-. сов 76 Xj(m) m 1,2,3,..., слеующих с частотой второго генератора тактовых импульсов. Второй блок 4 деления вырабатывает импульсы, оответствующие отношению Kfm) - , ™ X (т) де ,2,3,..., Х(т)- импульсы, амплитуда которых равна измеренному на выходе объекта 21 управления значению. Полученный сигнал используется ля корректировки вынужденной (разонной) составляющей переходного роцесса посредством блока 26 умноения, на выходе которого получают мпульсы 77 с амплитудой K(m)X(m), Выходные импульсы Х(т) первой одели 17 объекта поступают на вход лемента 25 сравнения, на второй вход оторого поступают импульсы 78, соотетствующие сигналу задатчика 22, актированные вторым генератором 2. а выходе элемента 25, таким образом, олучают сигналы (т), а на выоде первого блока 23 деления - имульсы 79, изменяющиеся по -закону f (т) |- -|4-Т К (т)- (га) где m 1 ,2,3,... Эти импульсы последовательно поступают на первый вход логического бл ка 27, на второй и третий входы кото рого поступают сигналы 80 предельно допустимых управляющих воздействий , и , полученные на третьей « 1М (J -цч I ( 15 и четвертой -16 клеммах опорного напряжения, тактированные шестым 8 и седьмым 9 импульсными элементами. Логический блок 27 анализирует последовательность f(га) (,2,3,.. на предмет наличия экстремума. Если найден экстремум - максимум, величин которого больше U, или минимум, меньший и , то логический блок вырабатывает противоположный по вели чине сигнал. Если экстремум не найден, логический блок вырабатывает +1, если последовательность f(m) мо нотонно убьшающая, и -1 если возрас тающая . На временной диаграмме (фиг. 4) на первом цикле последовательность f(m) (поз. 79) содержит минимум, ко торый не достигает предела U.- , а на втором цикле величина минимума меньше U, . Соответственно логиче кий блок 27 изменяет свой выходной сигнал с + 1 на-1 на втором цикле при обнаружении экстремума (поз. 81,1. Когда третий импульсный элемент 5 .замыкается,на фиксируюш,её звено 28 подается сигнал -1, и релейный элемент 29 устанавливает на входе объекта управления, равное U, торое поддерживается до тех пор, по ка логический блок 27 не выработает сигнал +1. Анализируя временные диаграммы (фиг. 4), можно проследить, как происходит компенсация несоответствия коэффициентов передачи моделей и объекта управления. Из сравнения им пульсов Х(т)(выход третьей модели 19 объекта) и импульсов Х(га), соответствующих измеренному значению уп равляемой координаты X (поз. 76), следует, что коэффициент передачи моделей занижен (меньше реального), Поэтому амплитуда импульсов К(т) --7-г больше 1 и в результате умХ„(т) нояения в блоке 26 последовательнос X (т), соответствующая разгонной функции модели, скорректирована в сторону увеличения (сравнить разгон ные функции X,(т) на выходе второй модели 18 .объекта, поз. 74, и КХ (т) на выходе блока 26 умножения, поз. 77). Хотя импульсы на выходе десятого импульсного элемента 12 в течение одного цикла работы второго генератора 2 тактовых импульсов имеют одинаковую амплитуду (поз. 75), а измеряемая координата за это время может измениться (поз. 76), этим изменением можно пренебречь, поскольку время замыкания четвертого импульсного элемента 6 незначительно по сравнению с длительностью переходных процессов. Таким образом компенсируется несоответствие коэффициентов передач при получении разгонной функции модули объекта для свободного движения объекта управления и.пи модели (величина коэффициента передачи значения не имеет). Формула изобретения Система автоматического управления, содержащая первый генератор тактовых импульсов, выход которого через первый одновибратор подключен к управляющим входам первого, второго и третьего импульсных элементов, а через второй одновибратор - к управляющему входу четвертого импульсного элемента, второй генератор тактовых импульсов, выход которого через третий одновибратор подключен к управляющим входам пятого, шестого, седьмого и восьмого импульсных элементов, первую и Вторую модель объекта, снабженных первым, вторым,, третьим, четвертым, пятым и шестым вхоДами, причем второй вход первой модели соединен через первый импульс-ный элемент с входом объекта управления, третий вход - через второй импульсный элемент - с выходом объекта управления и входом элемента памяти, выход которого подключен к четвертому входу первой модели объекта, а также система содержит три источника опорного напряжения, логический блок, выход которого через последовательно соединенньй третий импульсный элемент, фиксирующее звено и релейный элемент подключен к . входу объекта управления, блок деления, выход которого подключен к первому входу лохического блока, элемент сравнения, выход которого подк первому входу блока делеключенпервый вход - к перния, а вой модели объекта, первый источник опорного напряжения через четвертый импульсный элемент подключен к входу второго генератора тактовых импульсов, второй источник опорного напряжения через пятый импульсный эле мент соединен с первым входом второй модели объекта, третий и четвертый источники опорного напряжения соответственно червз шестой и седьмой импульсные элементы подключены к второму и третьему входам логическ го блока, второй вход элемента сравнения через восьмой импульсный элемент соединен с выходом задатчика, пятые входы первой и второй модели объекта соединены с выходом второго генератора тактовых импульсов, а шестые входы - с выходом первого генератора тактовых импульсов, о т личающая ся тем, что, с цс10 пoвышeIп я точности работы системы, в нее введены третья модель объекта, девятый и десятьпЧ импульсные элементы, второй блок деления и блок умножения, причем первый вход третьей модели объекта соединен с вторым входом первой модели объекта, а пятый вход - с выходом первого генератора тактовых импульсов, управляю цие входы девятого и десятого импульсных элементов подключены к - выходу .второго генератора тактовых импульсов, первый вход второго блока деления через девятый импульсный элемент соединен с выходом объекта управления, а второй вход через десятый импульсный элемент - с выходом третьей модели объекта, входы б;1ока умножения подключены к выходам второго блока деления и второй модели объекта, а выход.блока умножения соединен с вторым входом первого блока деления.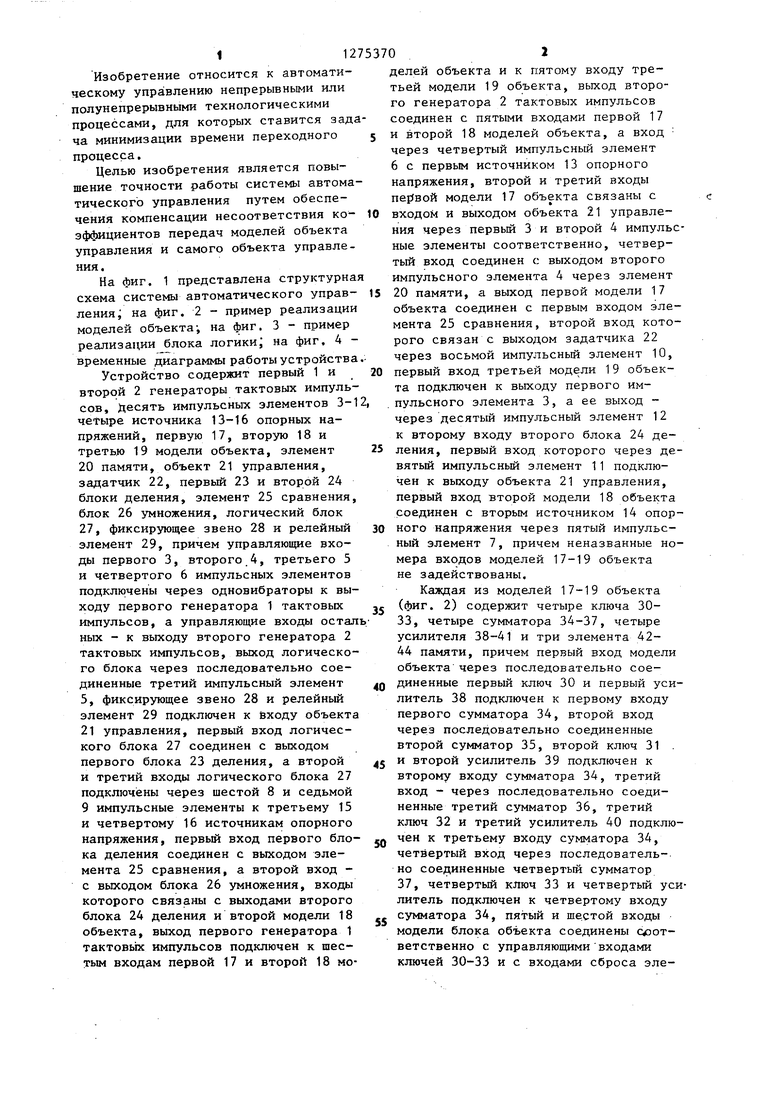

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1981 |
|
SU972472A1 |
| УСТРОЙСТВО ДЛЯ ВЕРОЯТНОСТНОГО МОДЕЛИРОВАНИЯ ПРОЦЕССА ФУНКЦИОНИРОВАНИЯ ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2020 |
|
RU2756883C1 |
| Синтезатор частоты с частотной модуляцией | 1986 |
|
SU1345343A1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Система оптимального управления | 1979 |
|
SU824140A2 |
| Устройство для защиты от помпажа компрессора | 1988 |
|
SU1663238A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Следящая система | 1986 |
|
SU1427327A1 |
| УСТРОЙСТВО ВЫЧИСЛЕНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ИНТЕГРАЛЬНОГО ПОКАЗАТЕЛЯ | 2017 |
|
RU2661749C1 |
Изобретение предназначено для автоматического управления непрерыв.ными или циклическими процессами, в которых ставится задача минимизации времени переходных процессов. Цель изобретения - повышение точности работы системы. Она содержит два генератора тактовых импульсов, управляющих импульсными элементами, последовательно включенные объект управления, релейный элемент, фиксирующее звено, блок логики, блок деления, элемент сравнения, задатчик, а.также две модели объекта, первая из которых входами связана с входом и выходом объекта, а выходом - с вторым входом элемента сравнения, а вход второй модели соединен с источником опорного напряжения. Для достижения цели дополнительно вводятся последовательно включенные третья модель объекта, второй блок деления и блок умножения, второй вход которого свяс € зан с выходом второй модели, а выход с вторым входом первого блока деле(Л ния. За счет введенных блоков и связей обеспечивается компенсация- несоответствия коэффициентов передач моделей объекта и самого объекта управления. 4 ил. 1чЭ , СЛ оо 
qjLfs.l tf- --П ( fK -П макс
81 n . ЭКС
7L
Фаг. iUffPT UPj 1L /
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
