Изобретение относится к обработке металлов резанием, в частности, касается силовых головок к сверлильным станкам.
Известна силовая головка с приводом от планетарного редуктора, обеспечивающего быстрый подвод - отвод и рабочую подачу, и кулачковым механизмом управления подачей fl.
Однако известная головка характеризуется недостаточной надежностью работы при осуществлении сверления на точную глубину.
Цель изобретения - повышение надежности работы головки.
Эта цель достигается тем, что механизм управления подачей выполнен в виде двух жестко установленных на солнечном колесе и водиле первой ступени планетарного редуктора, кулачковых дисков, каждый из которых имеет кольцевой бурт и выступ, и двух подпружиненных кулачков, которые размещены на введенной в головку подпружиненной вилке, установленной с возможностью поворота, причем кулачки и кулачковые диски размещены с возможностью взаимодействия между собой посредством упомянутых выступов , а вилка установлена с возможностью взаимодействия с буртами ку лачковых дисков.
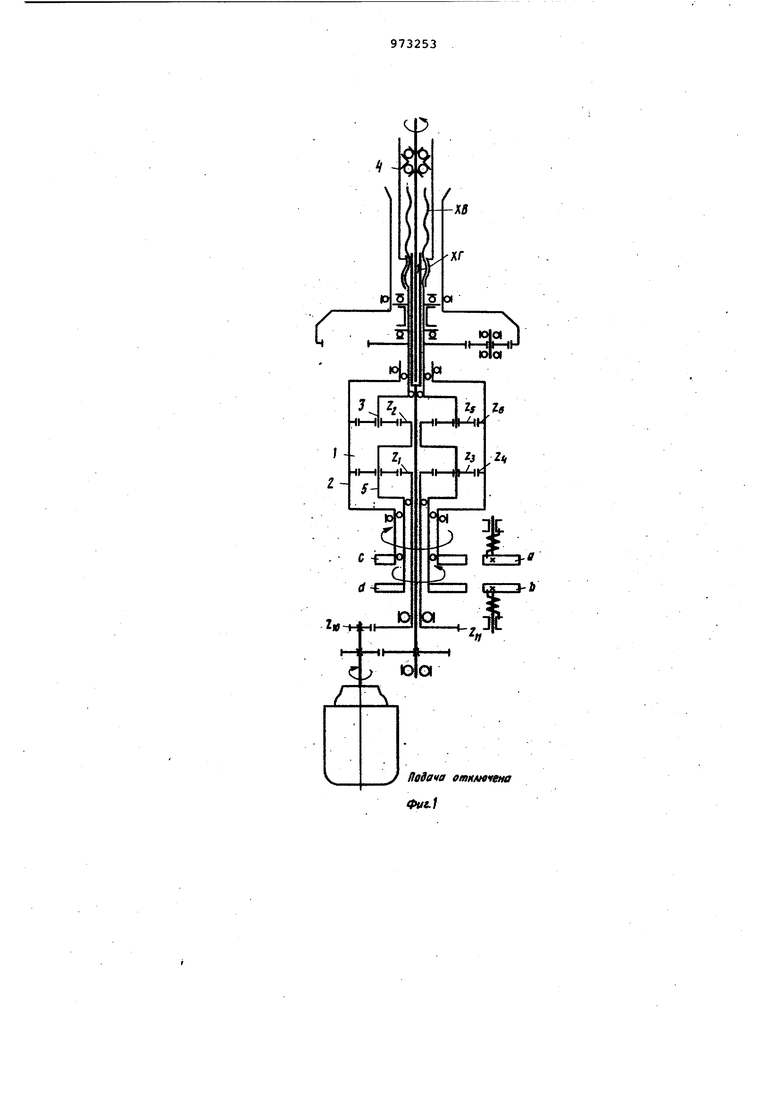
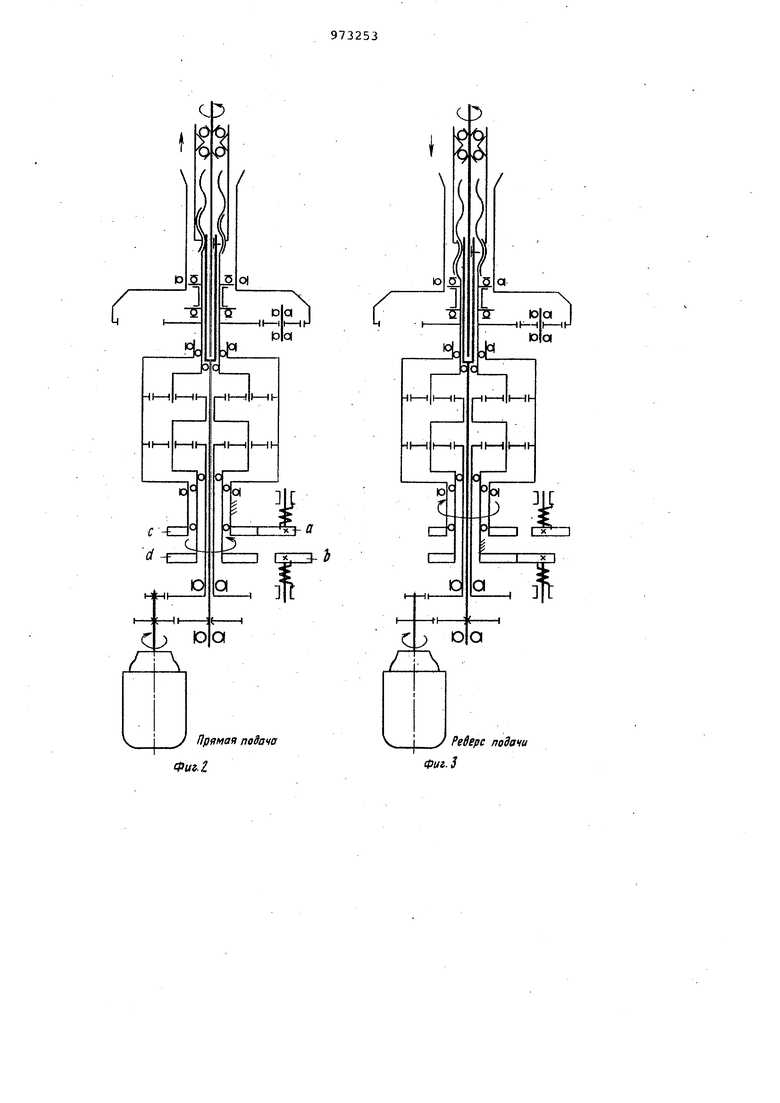
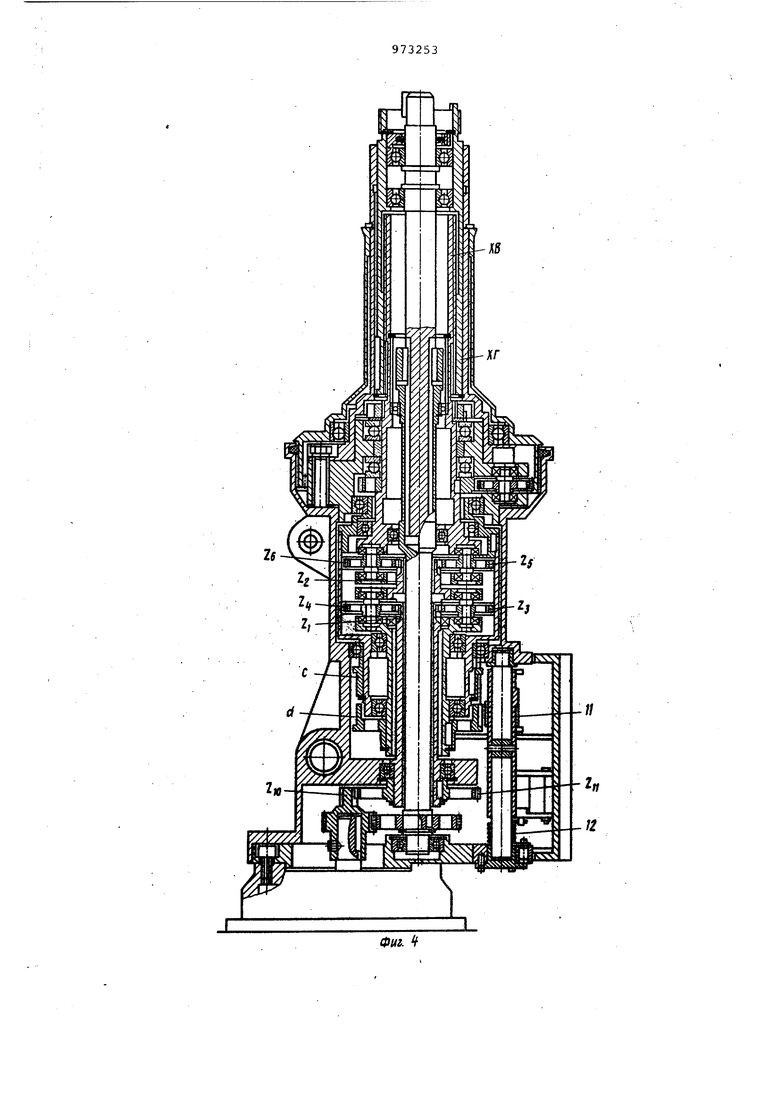
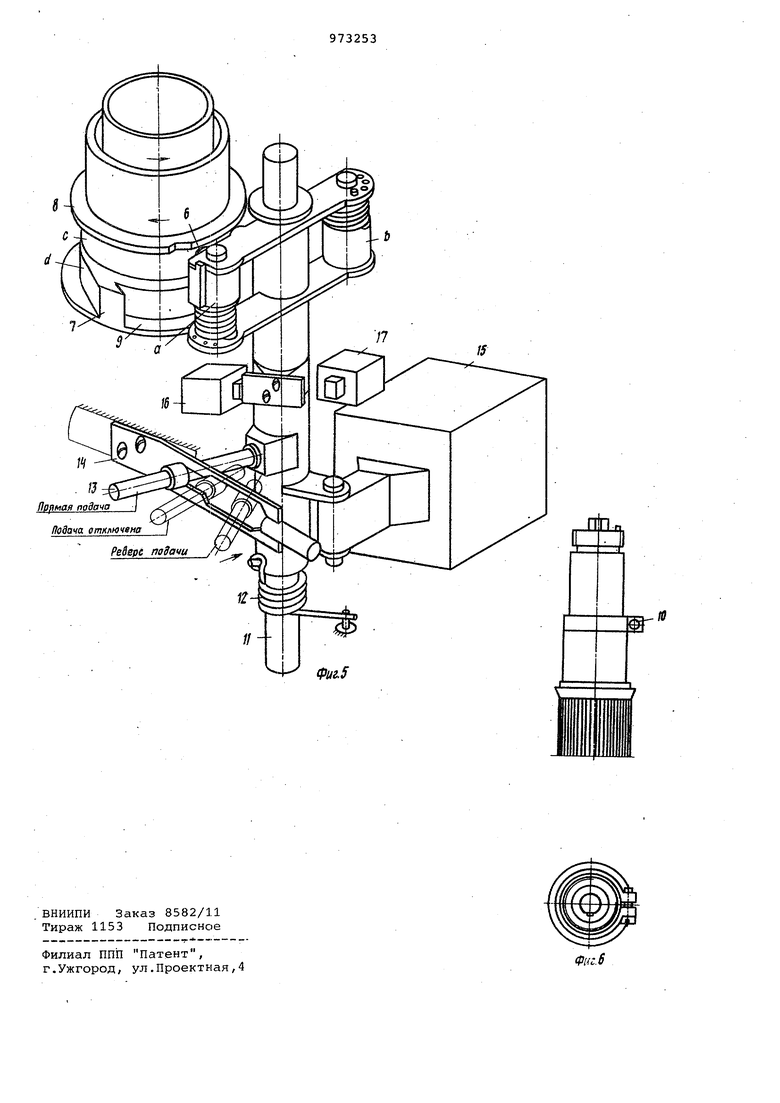
На фиг. 1 представлена кинематическая схема механизма силовой головки; на фиг. 2 - то же, в момент отключения подачи; на фиг. 3 - то же, во время рабочего хода и реверса; на фиг. 4 - головка, разрез по оси; на фиг. 5 - механизм управ10ления подачей; на фиг. 6 - установка упорного кольца на пиноли.
Механизм привода подачи включает в себя сменные шестерни и Z
5 (фиг. 1), двухступенчатый дифференциальный механизм 1 с общим солнечным колесом 2 и механизм управления .подачей (фиг. 5). Водило второй сту- пени 3 дифференциального механизма 1 является одновременно и ходовым винтом ХВ, входящим в зацепление с ходовой гайкой ХГ, выполненной за одно целое с пинолью 4. На солнечное колесо 2 и водило первой ступени 5
25 неподвижно установлены два кулачковых диска С и d с противоположно направленными зубьями-выступами 6 и 7 и кольцевыми буртиками 8 и 9 соответственно (фиг. 5). На пино30ли 4 находится упорное хомутовое
кольцо 10, необходимое для регулировки ее вылета (фиг. б) .
Механизм управления подачей состоит из вилки 11 (фиг. 5) с двумя подпружиненными кулачками а и Ь, пружины 12 на оси вилки, рычажка 13, пластинчатого стопора 14, а также электромагнита 15 с двумя микровыключателями 16 и 17.
Головка работает следующим образом.
В случае отключения подачи микровыключателя 16 и 17, электромагнит 15 выключен, а вилка 11 под действием пружины 12 с помощью рычажка 13 и пластинчатого стопора 14 зафиксирована в нейтральном положении, т.е. когда кулачки а и Ь не находятся в зацеплении с кулачковыми дисками Си d. В рассматриваемом случае . механизм привода подачи обладает двумя степенями свободы. Так как трение скольжения .в кинематических парах ходовой винт - гайка ходовая и пиноль - корпус значительно выше трения качения в подшипниках дифференциального механизма, то вращение ходового винта, а значит и перемещение пиноли не происходит. Кулачковые диски С иd вращаются с определенной угловой скоростью в противоположных направлениях, как показано на фиг. 1.
Для включения рабочей подачи нажимают пластинчатый стопор 14, в этом случае.освобожденный рычажок 13 дает возможность вилке 11 под действием пружины 12 повернуться до ее упора на кольцевой буртик 8 кулачкового диска С, как показано на иг, 5, Одновременно нажимается микропереключатель 16, подготавливай цепь для включения электромагнита 15. Кулачковый диск С, продолжая вращение, входит своим выступом 6 в зацепление с кулачком а, лишая механизм привода подачи одной степени свободы. Момент зацепления и будет моментом включения рабочего хода, а рассматриваемый механизм в этом случае будет работать как два послеовательно соединенных планетарных еханизма (фиг. 2).
При упоре в зенкуемую поверхность резко возросшее осевое усилие заставяет подпружиненный кулачок а провернуться, что вызывает угловое отклонение вилки 11, освобождая микроереключатель 16, включающий электромагнит 15.
Включенный электромагнит 15, предолевая усилие пружины 12, перебрасывает вилку 11 до ее упора на кольевой буртик 9 кулачкового диска d. дновременно нажимается микроперелючатель 17, подготавливая цепь ля выключения электромагнита 15. В
момент зацепления выступа 7 кулачкового диска d с кулачком Ь начинается реверс подачи,
В этом случае механизм привода подачи можно рассматривать как двухступенчатый механизм, в котором первая ступень представляет собой внутреннее зубчатое зацепление колес Z и Z через паразитную шестерню Zj, а вторая ступень - планетарный механизм с ведущим колесом Z, сателлитами Z, обкатывающимися по неподвижному колесу Z jj (фиг. 3) .
Дойдя до упорного кольца 10, пиноль 4 останавливается. При этом резко возрастает осевое усилие и происходит аналогичный проворот кулачка Ь, что вызывает угловое отклонение вилки 11, освобождая.микропереключатель 17, выключающий электрот магнит 15. После выключения электромагнйта 15 вилка 11 под действием пружины 12 с помощью рычажка 13 и пластинчатого стопора 14 возвращается в исходное положение.
Так как передаточное отношение механизма привода подачи при рабочем ходе будет значительно больше, чем при реверсе, то последний будет ускор нным.
Начальную длину вылета пиноли регулируют упорным хомутовым кольцом 10 (фиг. 6), обеспечивая минимальный выход инструмента из пакета
Таким образом, предложенная головка обеспечивает надежность в рароте при осуществлении сверления на точную глубину.
Формула изобретения
Силовая головка с приводом от планетарного редуктора, обеспечиваю щего быстрый подвод - отвод и рабочую подачу, и кулачковым механизмом управления подачей, отличающ а я с я тем, что, с целью повышения надежности работы головки, механизм управления подачей выполнен в виде двух жестко установленных на солнечном колесе и водиле первой ступени планетарного редуктора кулачковых дисков, каждый из которых имеет кольцевой бурт и выступ, и двух подпружиненных кулачков, которые размшцены на введенной в головку подпруясиненной вилке, установленной с возможностью поворота, причем кулачки и кулачковые диски размещены с возможностью взаимодействия между собой посредством упомянутых выступов, а вилка установлена с возможностью взаимодействия с буртами кулачковых дисков.
Источники информации, принятые во внимание при экспертизе
1. Кожевников. С.Н, Механизмы. ;правочное пособие. М., Машиностроение% 1976, с. 216, рис. 3.153.
| название | год | авторы | номер документа |
|---|---|---|---|
| Резьбонарезная головка | 1988 |
|
SU1690979A1 |
| Сверлильно-резьбонарезной полуавтомат | 1983 |
|
SU1098700A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ШАРОВЫХ КРАНОВ И РУЧНОЙ ДУБЛЕР | 2001 |
|
RU2213890C2 |
| ПЛАНЕТАРНАЯ АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ | 2008 |
|
RU2382259C2 |
| Сверлильная головка с автоматической подачей | 1978 |
|
SU706199A1 |
| Мотор-колесо | 1991 |
|
SU1772004A1 |
| ЦИЛИНДРИЧЕСКИЙ РЕДУКТОР | 1991 |
|
RU2010731C1 |
| АКТИВНАЯ ТРАНСМИССИЯ, КОРОБКА ПРЯМОГО ВКЛЮЧЕНИЯ (МЕХАНИЧЕСКАЯ), КОРОБКА СКОРОСТЕЙ С ПЛАНЕТАРНЫМ ФРИКЦИОНОМ И НЕЗАВИСИМОЙ ЗАДНЕЙ ПЕРЕДАЧЕЙ, РАЗДАТОЧНАЯ КОРОБКА С МЕХАНИЗМОМ РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА ОСЯМИ (КОЛЕСАМИ) | 2004 |
|
RU2292270C2 |
| Вальцовочная головка | 1978 |
|
SU740352A1 |
| ОТРЕЗНАЯ ГОЛОВКА К СТАНКУ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1998 |
|
RU2149737C1 |
.в -Ь
Фиъ.1
Фиг.З
nti
/0
