изобретение относится к устройствгул для измерения сил и моментов и может быть использовано в системах контроля и управления электропривода с асинхронным двигателем с фазным ротором.
Известны устройства для измерения нагрузки асинхронного двигателя, в которых измеряют ток статора двигателя, пропорционального статической нагрузке t Недостатком этих устройств является невысокая точность измерения.
Наиболее близким по технической сущности к предлагаемому является устройство для измерения момента асинхронного двигателя с фазнЕлм ротором, содержащее датчик тока и выпрямитель t
Недостатком известного устройства является невысокая точность устройства при изменении величины питающего напряжения.
Цель изобретения - повышение точности измерения.
Поставленная цель достигается тем, что в устройство введены датчик напряжения статора, функциональный элемент, источник опорного напряжения и сумматор, а датчик тока выполйен в виде датчика тока ротора, причем выход выпрямителя соединен с входами функционального элемента и сумматора, а датчик напряжения статора состоит из последовательно соединенных трансформатора напряжения, выпрямителя и узла сравнения, второй вход которого связан с источником опорного напряжения, а выход узла
10 сравнения-соединен со вторым входом функционального элемента, выход которого соединен со вторым входом сумматора.
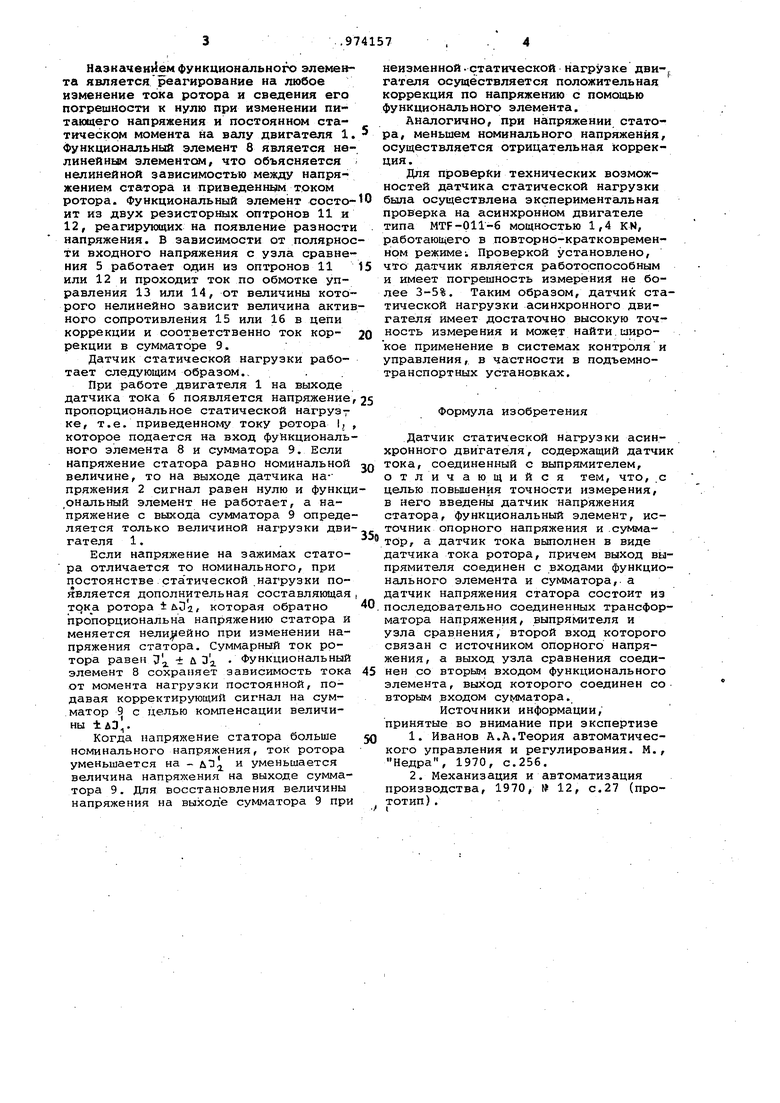
15 На фиг.1 показана структурная схема датчика на фиг.2 - принципиальная электрическая схема функционального элемента.
Датчик статической нагрузки асин20хронного двигателя 1 содержит датчик напряжения статора 2, включающий в себя последовательно соединенные трансформатор напряжения 3, выпрямитель 4, уэел сравнения 5, на второй
25 вход которого подается опорное напряжение. Датчик тока ротора б через выпрямитель 7 соединен с функциональным элементом 8 и сумматором 9. Обмотки ротора двигателя 1 нагружены на сопротивления 10,
30
Назначением функционального элемен- та является реагирование на любое изменение тока ротора и сведения его погрешности к нулю при изменении пи тающего напряжения и постоянном статическом момента на валу двигателя 1. Функциональный элемент 8 является нелинейным элементам, что объясняется нелинейной зависимостью между напряжением статора и приведеншда током ротора. Функциональный элемент состоит из двух резисторных оптронов 11 и 12, реагирующих на появление разности напряжения. В зависимости от полярности входного напряжения с узла сравнения 5 работает один из оптронов 11 или 12 и проходит ток по обмотке управления 13 или 14, от величины которого нелинейно зависит величина активного сопротивления 15 или 16 в цепи коррекции и соответственно ток коррекции в сумматоре 9.
Датчик статической нагрузки работает следующим образом..
При работе двигателя 1 на выходе датчика тока 6 появляется напряжение, пропорциональное статической нагрузу ке, т.е. приведенному току ротора I, , которое подается на вход функционального элемента 8 и сумматора 9. Если напряжение статора равно номинальной величине, то на выходе датчика напряжения 2 сигнал равен нулю и функци,ональный элемент не работает, а напряжение с выхода сумматора 9 определяется только величиной нагрузки двигателя 1..
Если напряжение на зажимах статора отличается то номинального, при постоянстве статической нагрузки появляется дополнительная составляющая тока ротора ±лС12, которая обратно пропорциональна напряжению статора и меняется нели|1ейно при изменении напряжения статора. Суммарный ток ротора равен ;j,j ± л Di Функциональный элемент 8 сохраняет зависимость тока от момента нагрузки постоянной, подавая корректирующий сигнал на сумматор 9 с целью компенсации величины .
Когда напряжение статора больше номинального напряжения, ток ротора уменьшается на - л и уменьшается величина напряжения на выходе сумматора 9. Для восстановления величины напряжения на выходе сумматора 9 при
неизменной -статической нагрузке двигателя осуществляется положительная коррекция по напряжению с помощью функционального элемента.
Аналогично, при напряжении статора, меньшем номинального напряжения, осуществляется отрицательная коррекция .
Для проверки технических возможностей датчика статической нагрузки была осуществлена экспериментальная проверка на асинхронном двигателе типа MTF-pll-б мощностью 1,4 KN, работающего в повторно-кратковременном режиме; Проверкой установлено, что датчик является работоспособным и имеет погрешность измерения не более 3-5%. Таким образом, датчик статической нагрузки асинхронного двигателя имеет достаточно высокую точность измерения и может найти.широкое применение в системах контроля и управления, в частности в подъемнотранспортных установках.
Формула изобретения
Датчик статической нагрузки асинхронного двигателя, содержащий датчи тока, соединенный с выпрямителем, отличающийся тем, что,.с целью повышения точности измерения, в него введены датчик напряжения статора, функциональный элемент, источник опорного напряжения и .сумматор/ а датчик тоКа выполнен в виде датчика тока ротора, причем выход выпрямителя соединен с входами функционального элемента и сумматора,, а датчик напряжения статора состоит из последовательно соединенных трансформатора напряжения, выпрямителя и узла сравнения, второй вход которого связан с источником опорного напряжения, а выход узла сравнения соединен со вторым входом функционального элемента, выход которого соединен со вторым .входом сумматора.
Источники информации, принятые во внимание при экспертизе
1.Иванов А.А.Теория автоматического управления и регулирования. М., Недра, 1970, с.256.
2.Механизация и автоматизация производства, 1970, № 12, с.27 (прототип) .
n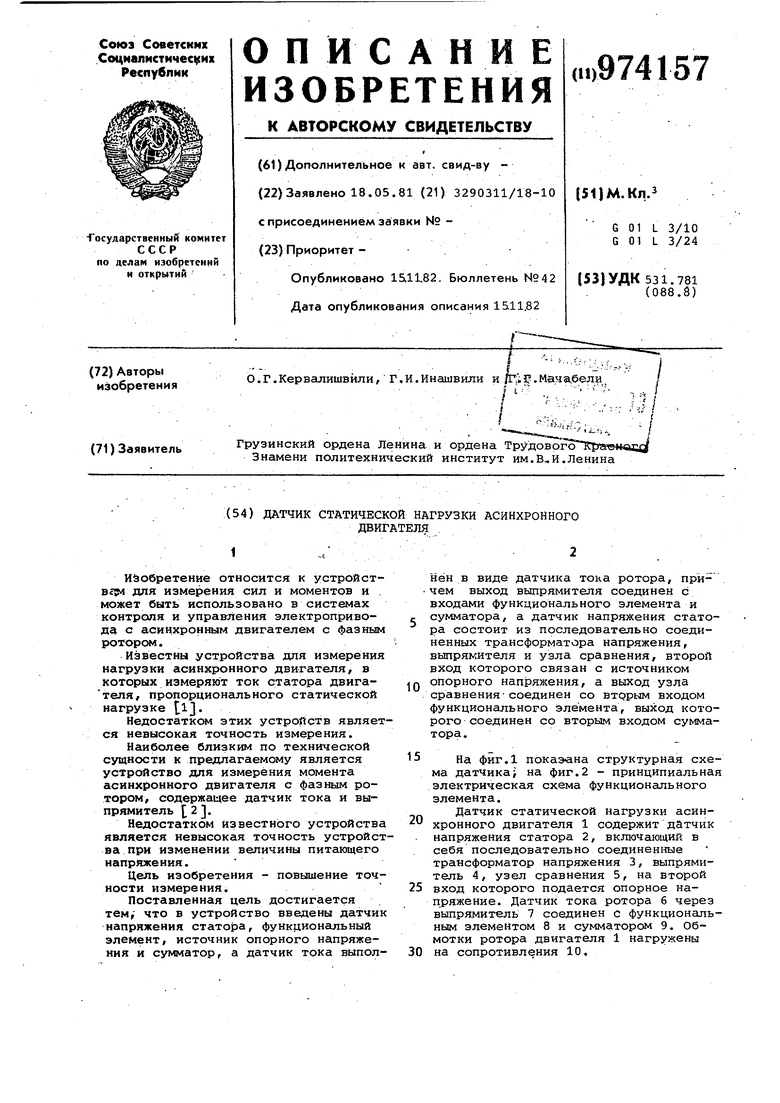
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОЛЬЖЕНИЕМ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ | 2001 |
|
RU2187194C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2015 |
|
RU2599529C1 |
| УСТРОЙСТВО ПИТАНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2647882C2 |
| Электропривод | 1979 |
|
SU942230A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| Частотноуправляемый асинхронный электропривод | 1983 |
|
SU1129711A2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
С8ши$а7
С 5
