1П Изобретение относится к электротех нике, а именно к управляемому элект троприводу, и может быть использован при построевии частотно-управляемых асинхронных электроприводов, содержа щих вентильные преобразователи частоты с автономными инверторами при обеспечении широкого диапазона регулирования скорости. По основному авт.св. № 642839 известен частотно-управляемьй асинхрон ный электропривод, которьй содержит вентильный преобразователь частоты с автономным инвертором тока, управлякщие входы которого через блок управления инвертором, индукционную машину и регулятор скольжения подключены к функциональному преобразователю и с управляемым выпрямителем, управляющие входы которого через бло импульсно-фазового управления и регулятор тока подключены ко второму входу функционального преобразователя, выход которого соединен с выходо регулятора скорости, а также блок коррекции, входы которого соединены с выходами регулятора скорости и бло ка управления инвертором, в выход с дополнительным входом регулятора тока С1. Недостаток известного электропривода заключается в том, что в некото рых режимах работы с помощью блока коррекции пульсации момента двигателя не устраняются, что снижает диапазон регулирования частоты враще- : кия. Это приводит в режиме заправки и пуска к обрыву полосы листовых про катных станов, к поломке инструмента обрабатывающих станков, увеличива ёт потери рабочего на устранение неисправностей. Цель изобретения - расширение диа пазона регулирования частоты вращения в область низких частот вращения Поставленная цель достигается тем что в частотно-управляемьй асинхронный электропривод введен нелинейньй блок, реализующий функцию . при jttl/tUHoM I lf(m). при| W/UIHOM| при этом входы нелинейного блока сое динены с выходами регулятора и датчи
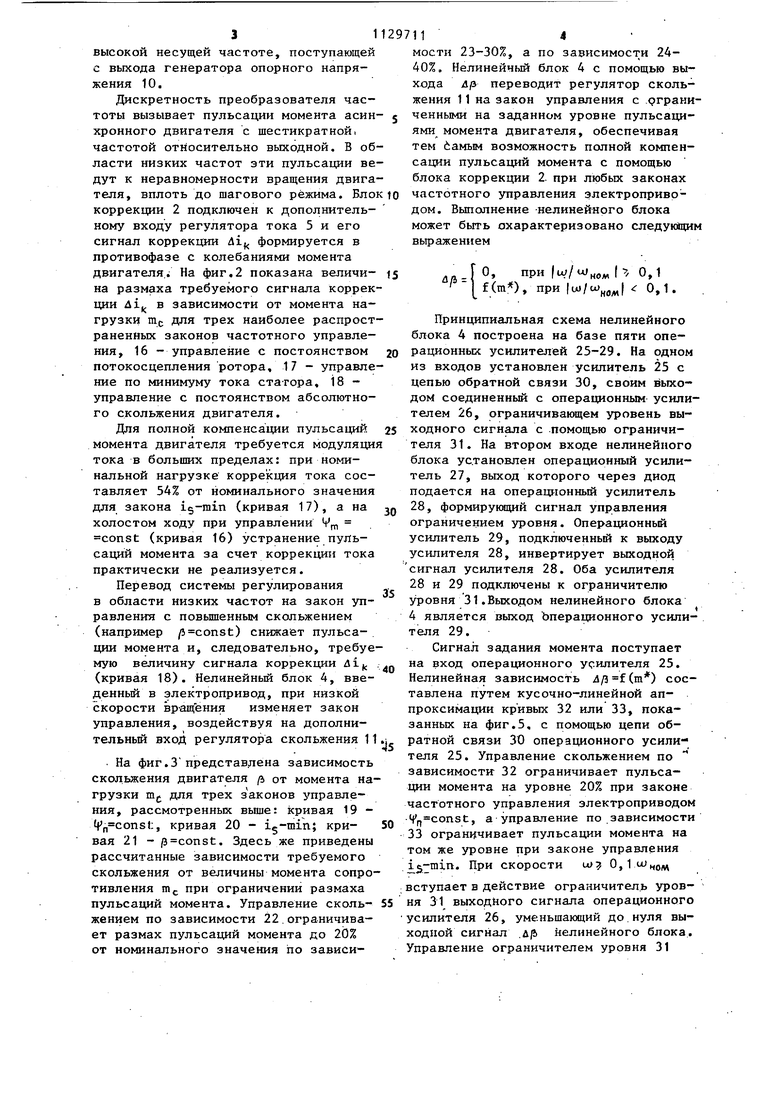
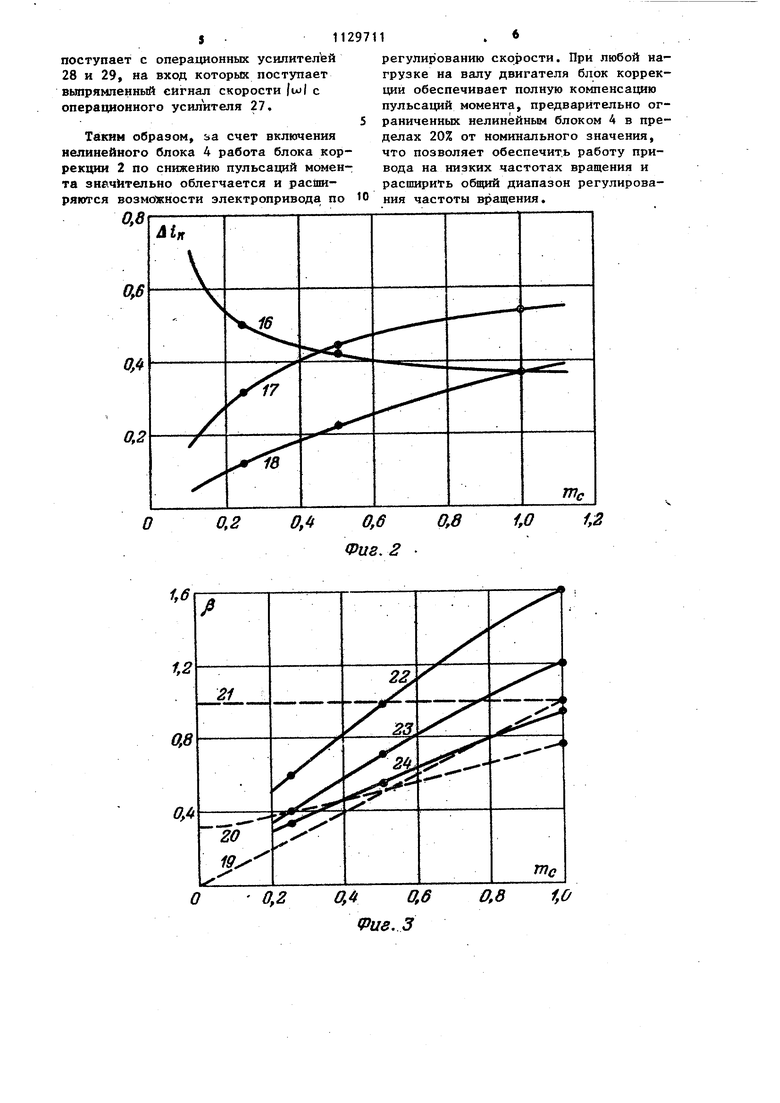
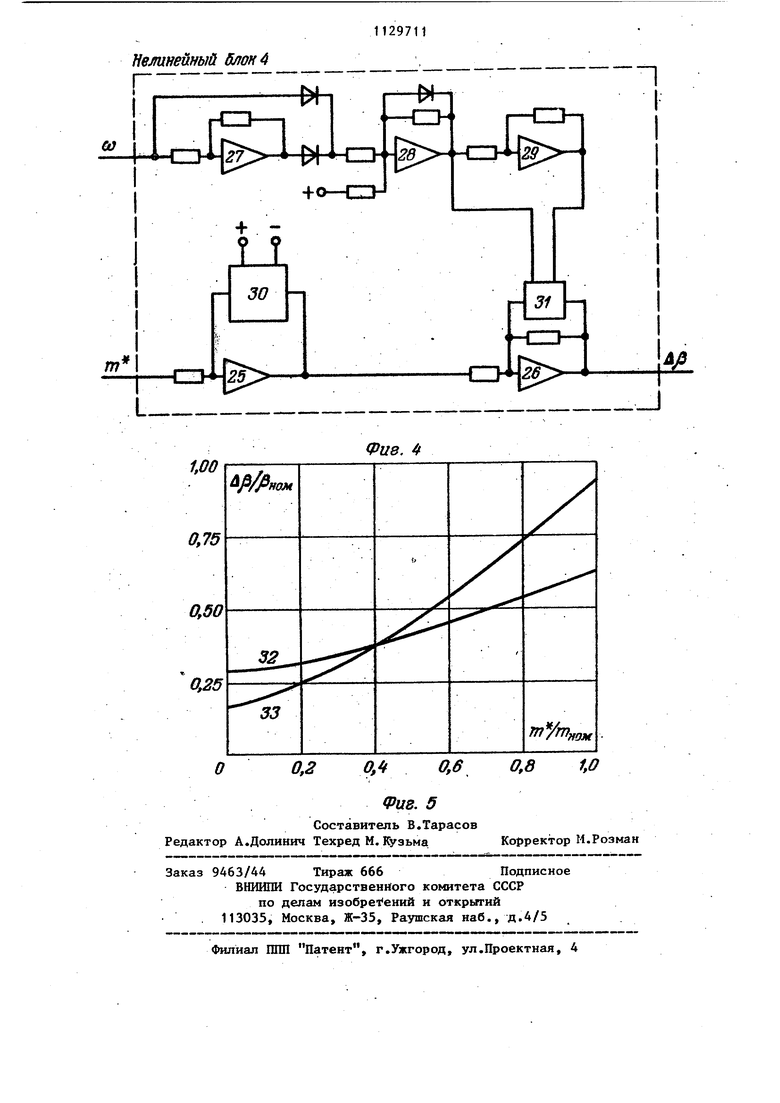
ка скорости, а выход подключен к регулятору скольжения, где др - сигнал коррекции скольжения, f(ni) - функцирегулятора скольжения 11. Обработка информации в системе регулирования для повьш1ения быстродействия идет на ональная зависимость изменения л ft от момента сопротивления, (о, несущая и номинальная частоты вращения. На фиг.1 показана схема частотноуправляемого асинхронного электропривода, на фиг.2 - схема нелинейного блока, на фиг.З - зависимость сигнала коррекции от момента нагрузки, на фиг.4 - зависимость скольжения от момента .нагрузки,- на фиг.5 - зависимость коррекции скольжения от величины момента. Частотно-управляемьй асинхронньй электропривод содержит регулятор скорости 1, выход которого соединен со входами блока коррекции 2,функционального преобразователя 3 и нелинейного блока 4, а входы регулятора тока 5 подключены к выходам блока коррекции 2, функционального преобразователя 3 и датчика тока 6. Выход регулятора тока 5 через блок импульсно-фазового управления 7 подключен на вход управляемого выпрямителя 8, выход которого соединен с автономным инвертором тока 9. Выход генератора опорного напряжения 10 через регулятор скольжения 11, индукционную машину 12 и блок управления 13 инвертором 9 подключен на вход автономного инвертора тока 9, выход которого соединен с асинхронным электродвигателем 14. Индукционная машина 12 через датчик скорости 15 подключена на (ВХОД регулятора скорости 1 и нелиней- ного блока 4. Другой вход нелинейного блока 4 соединен с выходом датчика скорости 15, а выход подключен к регулятору скольжения 11. Электропривод работает следующим образом. Система регулирования содержит два замкнутых по отклонению контура с регулятором тока 5 и регулятором скорости 1, задающих величину выходного сигнала автономного инвертора 9. Частота этого сигнала формируется в контуре регулирования скольжения, замкнутом по возмущению.В контуре имеется индукционная машина 12, фиксирующая угол поворота ротора асинхронного двигателя 14. Сигнал заданного скольжения формируется с помощью функционального преобразователя 3 и высокой несущей частоте, поступающей с выхода генератора опорного напряжения 10. Дискретность преобразователя частоты вызывает пульсации момента асин кронного двигателя с шестикратной, частотой относительно выходной. В об ласти низких частот эти пульсации ве дут к неравномерности вращения двига теля, вплоть до шагового режима. Бло коррекции 2 подключен к дополнительному входу регулятора тока 5 и его сигнал коррекции di формируется в противофазе с колебаниями момента двигателя.; На фиг.2 показана величина размаха требуемого сигнала коррек ции д, в зависимости от момента нагрузки Шс для трек наиболее распрост раненных законов частотного управле- ния, 16 управление с постоянством потокосцепления ротора, 17 - управле ние по минимуму тока статора, 18 - управление с постоянством абсолютного скольжения двигателя. Для полной компенсации пульсаций момента двигателя требуется модуляци тока в больших пределах: при номинальной нагрузке коррекция тока составляет 54% от номинального значения для закона ig-min (кривая 17), а на холостом ходу при управлении V, const (кривая 16) устранение пульсаций момента за счет коррекции тока практически не реализуется. Перевод системы регулирования в области низких частот на закон управления с повьш1енным скольжением (например /5 const) снижает пульсации момента и, следовательно, требуе мую величину сигнала коррекции л (кривая 18). Нелинейный блок 4, введенньш в электропривод, при низкой скорости вращения изменяет закон управления, воздействуя на дополнительньш вкоД регулятора скольжения 11 . На фиг.3представлена зависимость скольжения двигателя Ь от момента на грузки ffij. для трех з аконов управления, рассмотренных выше: кривая 19 Ц п соп8«;, кривая 20 - Ц-тш; кривая 21 - /3 const. Здесь же приведены рассчитанные зависимости требуемого скольжения от величины момента сопро тивления mj. при ограничении размаха пульсаций момента. Управление скольжением по зависимости 22.ограничивает размах пульсаций момента до 20% от номинального значения по зависимости 23-30%, а по зависимости 2440%. Нелинейный блок 4 с помощью выхода л/3 переводит регулятор скольжения 11 на закон управления с рграниченными на заданном уровне пульсациями момента двигателя, обеспечивая тем бамым возможность полной компенсации пульсаций момента с помощью блока коррекции 2. при любых законах частотного управления электроприводом. Выполнение нелинейного блока может быть охарактеризовано следукщим выражением Л/1 ° Р при ( ( , 0,1 I f(т), при |w/u ном1 О.Ь Принципиальная схема нелинейного блока 4 построена на базе пяти операционных усилителей 25-29. На одном из входов установлен усилитель 25 с цепью обратной связи 30, своим выходом соединенный с операционным усилителем 26, ограничивающем уровень выходного сигнала с помощью ограничителя 31. На втором входе нелинейного блока установлен операционный усилитель 27, выход которого через диод подается на операционный усилитель 28, формирующий сигнал управления ограничением уровня. Операционный усилитель 29, подключенный к выходу усилителя 28, инвертирует выходной сигнал усилителя 28. Оба усилителя 28 и 29 подключены к ограничителю уровня 31.Выходом нелинейного блока 4 является выход Ъперационного усилителя 29. Сигнал задания момента поступает на вход операционного усилителя 25. Нелинейная зависимость Л/3 f (m) составлена путем кусочно-линейной аппроксимации кривых 32 или 33, показанных на фиг.5, с помощью цепи обратной связи 30 операционного усилителя 25. Управление скольжением по зависимости 32 ограничивает пульсации момента на уровне 20% при законе частотного управления электроприводом 4f,const, а управление по зависимости 33 ограничивает пульсации момента на том же уровне при законе управления . При скорости и ступает в действие ограничитель уров- ня 31 выходного сигнала операционного усилителя 26, уменьшающий до.нуля выходной сигнал .др нелинейного блока. Управление ограничителем уровня 31 S112971 поступает с операционных усилителей 28 и 29, на вход которых поступает выпрямленный сигнал скорости |w| с операционного усилителя 27. Таким образом, за счет включения нелинейного блока 4 работа блока коррекции 2 по снижению пульсаций момента значительно облегчается и расширяются возможности электропривода по Ю 0, 0.6 Фиг, 1 . регулированию скорости. При любой нагрузке на валу двигателя блок коррекции обеспечивает полную компенсацию пульсаций момента, предварительно ограниченных нелинейным блоком 4 в пределах 20% от номинального значения, что позволяет обеспечить работу привода на низких частотах вращения и расширить общий диапазон регулирования частоты вращения. 0.8 2
О 0,2 О,4 О.6
О.8 1,0
fPua, 3
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| Частотно-управляемый асинхронный электропривод | 1982 |
|
SU1083316A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1264289A2 |
| Частотнорегулируемый электропривод автономного транспортного средства | 1985 |
|
SU1291458A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| Электропривод испытательного стенда для асинхронных двигателей | 1985 |
|
SU1283932A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1379932A2 |
ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД по авт.св. № 642839, отличающийся тем, что, с цепью расширения диапазона регулирования частоты вращения в область низких частот вращения, он дополнительно снабжен нелинейным блоком, реализующим функцию Г О , при |ш/ы„р Г л 0,1 Л/i L f (т) ,при I и)/и),„„| I 0,1, ком при этом входы нелинейного блока соединены с выходами регулятора и датчика скорости, а выход подключен к регулятору скольжения, где йр - сигнал коррекции скольжения, f(га) - функциональная зависимость изменения от момента сопротивления,, - текущая и номинальная частоты вращения. S Off to СО ч
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Частотноуправляемый асинхронный электропривод | 1976 |
|
SU642839A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
