Изобретение относится к электротехнике и может быть использовано в частотно-регулируемых электроприводах. Предлагаемое устройство может быть использовано для создания автоматизированных электроприводов переменного тока с частотным управлением, испытывающих нагрузки выше номинальных, без дополнительных датчиков скорости и, в частности, для создания тягового электропривода транспортных устройств городского хозяйства, например привода троллейбуса, трамвая; горнорудной промышленности, например привода шахтного электровоза, шахтного самоходного вагона.
При использовании автоматизированных электроприводов с частотным управлением двигателями переменного тока без дополнительных датчиков скорости возникают проблемы поддержания скорости и защиты двигателя и преобразователя при нагрузках выше номинальных. Сложности управления асинхронными двигателями характерны для многодвигательных приводов, когда два и более двигателей питаются от одного преобразователя.
Скалярное частотное управление является основным видом управления, используемым в автоматизированном асинхронном электроприводе. В настоящее время, несмотря на конкуренцию с векторными способами управления, оно довольно широко распространено, т.к. позволяет решать многие технические задачи массового электропривода проще и эффективнее. При скалярном способе управления можно управлять двумя и более двигателями, к тому же он не требует дополнительных датчиков (скорости, потока). Поэтому наиболее часто в частотно-регулируемых электроприводах используется скалярное управление.
Наиболее близким является устройство частотного управления асинхронным электроприводом (патент РФ №2412526, МПК НО2Р 23/00, опубл. 20.02.2011), которое содержит асинхронный двигатель, преобразователь частоты и напряжения и функциональный преобразователь, в котором реализуется зависимость амплитуды напряжения от частоты. В устройство входят датчики тока статорной обмотки двигателя, сигналы с выходов которых подаются на входы функционального преобразователя тока, где формируются выходные сигналы, пропорциональные значению активной составляющей тока статора. Положительная обратная связь по активной составляющей тока статора, которая через статический нелинейный преобразователь корректирует амплитуду напряжения при увеличении тока, обеспечивает увеличение магнитного потока. Выходной сигнал второго статического нелинейного преобразователя меняет свой знак с плюса на минус при превышении сигнала, пропорционального активной составляющей тока статора, своего номинального значения. Это приводит к снижению задания на частоту и синхронной скорости двигателя. При этом происходит увеличение потока двигателя, а следовательно, увеличение жесткости механической характеристики. Это приводит к уменьшению скольжения двигателя в полтора-два раза, а скорость снижается на пять-семь процентов по сравнению со скоростью двигателя при начальной большей синхронной скорости двигателя. Недостаток данного устройства заключается в том, что положительная обратная связь по активной составляющей тока резко ухудшает устойчивость системы, из-за чего коэффициент усиления этой указанной обратной связи нельзя увеличить до необходимого значения, в связи с чем, ее действие, заключающееся в увеличении амплитуды подаваемого на статор двигателя напряжения, весьма ограничено. Так, при полуторакратном значении номинального тока статора (Iн) и при максимальной величине статической компенсации по активной составляющей тока статора (Ir-компенсация), в преобразователе частоты ATV32 фирмы Scheider Electric выходное напряжение увеличивается на 5 В (2,5%), в преобразователе частоты NXP фирмы Vacon - на 10 В (3%). Это связано с тем, что разработчики преобразователей опасаются нарушения устойчивости электропривода. В результате чего действие Ir-компенсации до 1,5Iн практически не сказывается на работе электропривода, а для поддержания скорости двигателя при изменяющейся нагрузке рекомендуется применять систему управления, замкнутую по скорости вращения вала двигателя. Это требует наличия датчиков скорости, которые можно установить далеко не на все механизмы, либо системы косвенного вычисления скорости, требующей больших вычислительных мощностей и не работающей на низких частотах вращения (0-10 Гц).
Однако для целого ряда электроприводов механизмов (преимущественно военного назначения) такой точности недостаточно. Для таких механизмов требуется поддерживать скорость с точностью до 1-2% при значительных изменениях нагрузки.
Авторы провели исследования асинхронного электропривода с преобразователем частоты ATV 71. Режим поддержания скорости исследовался в замкнутой по скорости системе и в разомкнутой с максимальным коэффициентом «Ir-компенсации», которая должна обеспечивать поддержание скорости при увеличении нагрузки.
В замкнутой по скорости системе амплитуда напряжения на статоре увеличилась на 40 В, а частота напряжения - на 7 Гц, при этом скорость при набросе нагрузки снизилась на 1%.
В разомкнутой системе снижение скорости при той же нагрузке составило 30%, т.к. напряжение увеличилось на 5 В, а частота напряжения - на 1 Гц. Это произошло из-за того, что коэффициент «Ir-компенсации» не достаточен для поддержания скорости в необходимом диапазоне изменения нагрузки. Увеличить его до необходимой величины возможности нет, т.к. безынерционная положительная обратная связь с таким коэффициентом приведет к неустойчивости электропривода.
Техническая задача изобретения направлена на обеспечение эффективности корректирующей связи по току статора при сохранении устойчивости системы управления асинхронным электроприводом.
Под эффективностью понимается поддержание скорости вращения вала двигателя с точностью до 2-3% при нагрузке до 2Iн для электродвигателей с номинальным скольжением до 10% и при нагрузке до 1,5Iн - со скольжением от 10% до 15%. Для этого необходимо обеспечить при 1,5Iн увеличение питающего двигатель напряжения не менее 30-40 В.
Технический результат изобретения - поддержание заданной скорости вращения асинхронного электродвигателя с погрешностью не более 2-3% при изменении нагрузки в широких пределах, в том числе при увеличении приложенного к приводу механического момента до полуторакратного значения номинального момента электродвигателя и, соответственно, увеличении тока статора до 1,5Iн.
Техническая задача достигается тем, что в устройстве управления асинхронным двигателем, содержащем асинхронный двигатель и преобразователь частоты и напряжения, управляющие входы которого соединены соответственно с выходами первого и второго сумматоров, первый вход второго сумматора соединен с функциональным преобразователем, вход которого соединен с источником сигнала задания, а второй вход - с выходом статического преобразователя, первый вход первого сумматора соединен с источником сигнала задания, а второй вход - с выходом первого статического нелинейного преобразователя, а также датчики тока статорной обмотки двигателя, выходы которых соединены с первым и вторым входами функционального преобразователя тока, согласно изобретению первый выход функционального преобразователя тока, соответствующий положительной обратной связи по току статора, соединен с входом апериодического звена первого порядка, выход которого соединен с входом статического преобразователя и с входом первого статического нелинейного преобразователя.
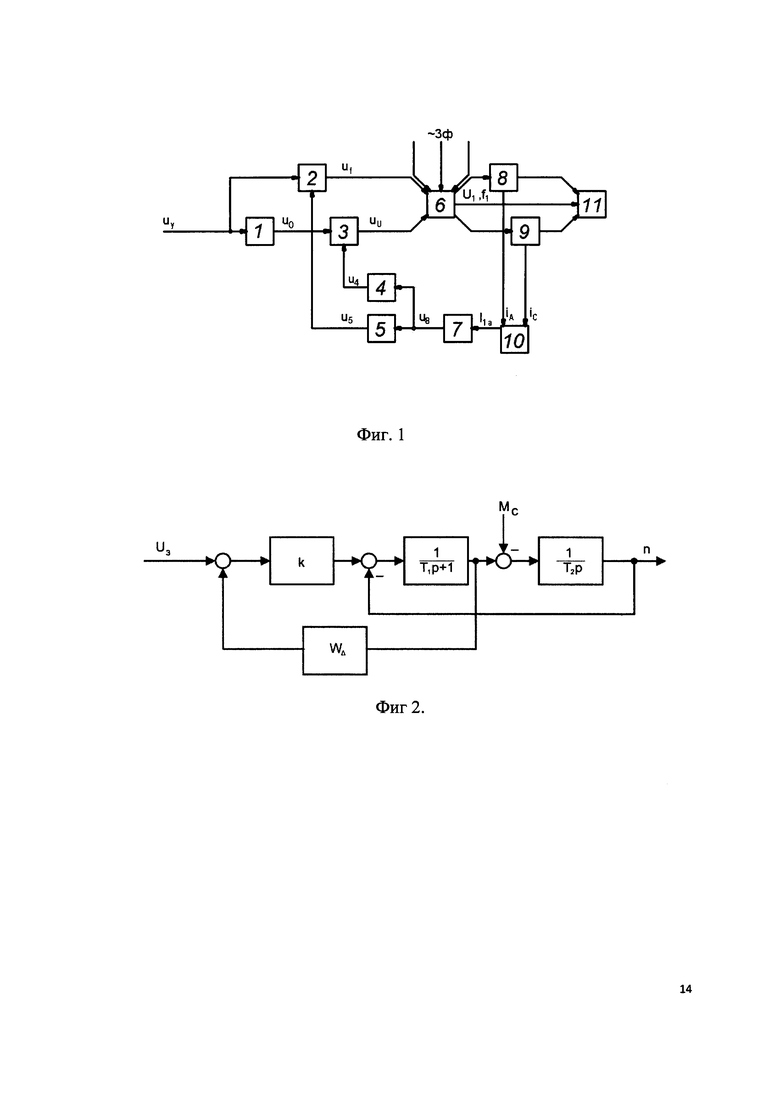
Заявленное устройство представлено на следующих фигурах: на фиг. 1 представлена блок-схема устройства для управления частотно-регулируемым асинхронным электроприводом, на фиг. 2 представлена структурная схема АЭП с положительной обратной связью, на фиг. 3 представлены переходные процессы при набросе нагрузки, на фиг. 4 представлены переходные процессы колебательной системы, на фиг. 5 представлена преобразованная структурная схема электропривода, на фиг. 6 представлены частотные характеристики неизменяемой части электропривода, на фиг. 7 представлена преобразованная упрощенная структурная схема, на фиг. 8 представлены частотные характеристики при звене положительной обратной связи (ПОС) WX=k, на фиг. 9 представлены частотные характеристики при звене ПОС  .
.
На фиг. 1 обозначены следующие элементы:
1 - функциональный преобразователь;
2 - первый сумматор;
3 - второй сумматор;
4 - статический преобразователь;
5 - первый статический нелинейный преобразователь;
6 - преобразователь частоты и напряжения;
7 - апериодическое звено первого порядка;
8 - датчик тока фазы А;
9 - датчик тока фазы С;
10 - функциональный преобразователь тока;
11 - асинхронный двигатель с короткозамкнутым ротором.
Данный вариант используется в тех случая, когда невозможна установка датчиков скорости, либо в многодвигательных приводах, когда два и более двигателя питаются от одного преобразователя.
Устройство управления асинхронным двигателем (фиг. 1) содержит асинхронный двигатель 11 и преобразователь частоты и напряжения 6. Управляющие входы uf и uu, которые определяют значения частоты f1 и напряжения U1 на выходе преобразователя частоты и напряжения 6, соединены соответственно с выходами второго 3, и первого 2 сумматоров. На первый вход первого 2 сумматора подается сигнал задания uy, а на первый вход второго сумматора 3 этот сигнал проходит через функциональный преобразователь 1, в котором реализуется зависимость амплитуды напряжения от частоты, и на выходе формируется сигнал u0. В устройство входят датчики тока статорной обмотки двигателя 8 и 9, сигналы с выходов которых подаются на входы функционального преобразователя тока 10, где формируется выходной сигнал I1a пропорциональный активной составляющей тока статора. Сигнал I1a подается на вход апериодического звена 7 с постоянной времени Т, выход которого подается на вход статического преобразователя 4 и на вход первого статического нелинейного преобразователя 5, характеристика которого представлена на фиг. 3. Выход первого статического нелинейного преобразователя 5 соединен со вторым входом первого сумматора 1. Сигнал на выходе первого статического нелинейного преобразователя 5 меняет свой знак с плюса на минус при превышении сигнала, пропорционального активной составляющей тока статора, своего номинального значения. Выход статического преобразователя 4 соединен со вторым входом второго сумматора 3.
Устройство работает следующим образом.
Положительная обратная связь по активной составляющей тока статора корректирует одновременно сигнал канала напряжения и сигнал канала частоты. По мере увеличения момента статической нагрузки асинхронного двигателя 11 и соответствующего увеличения тока статора на вход второго сумматора 3 поступает дополнительный сигнал u4, увеличивающий сигнал uu, определяющий значение напряжения на выходе преобразователя частоты, этот дополнительный сигнал формируется с задержкой времени, определенной постоянной времени апериодического звена. Связь между u4 и I1a определяется следующим образом:


где u4 - выходной сигнал статического преобразователя 4; uu - входной сигнал преобразователя частоты и напряжения 6, определяющий значение напряжения на выходе; k4 - коэффициент усиления статического преобразователя 4, k0 - коэффициент усиления функционального преобразователя 1, uy - сигнал задания, I1a - активная составляющая тока статора, ТР - постоянная времени апериодического звена.
В итоге по мере увеличения тока статора увеличивается напряжение на выходе преобразователя частоты 6 не мгновенно, а через время, определенное характеристиками апериодического звена. Повышение напряжения на обмотках статора асинхронного двигателя 11 способствует полной компенсации падения напряжения на полном их сопротивлении и, в результате, увеличению потока намагничивания асинхронного двигателя 1. Чем больше k4 и k5, тем точнее работает коррекция. Предел увеличения коэффициентов k4 и k5 определяется условиями устойчивости замкнутой системы управления, которые допускают значительно большие значения коэффициентов k4 и k5, чем в устройстве-прототипе.
В прототипе при превышении активной составляющей тока статора своего номинального значения, но когда еще ток статора не превышает своего допустимого значения, меняется знак обратной связи в канале регулирования частоты. При этом происходит снижение токов статора и ротора, снижаются потери в двигателе и сохраняется работоспособность привода. Однако эффективная работы этих связей нарушает устойчивость электропривода. Введение в эту связь апериодического звена первого порядка позволяет обеспечить устойчивость электропривода при необходимом значении коэффициентов k4 и k5.
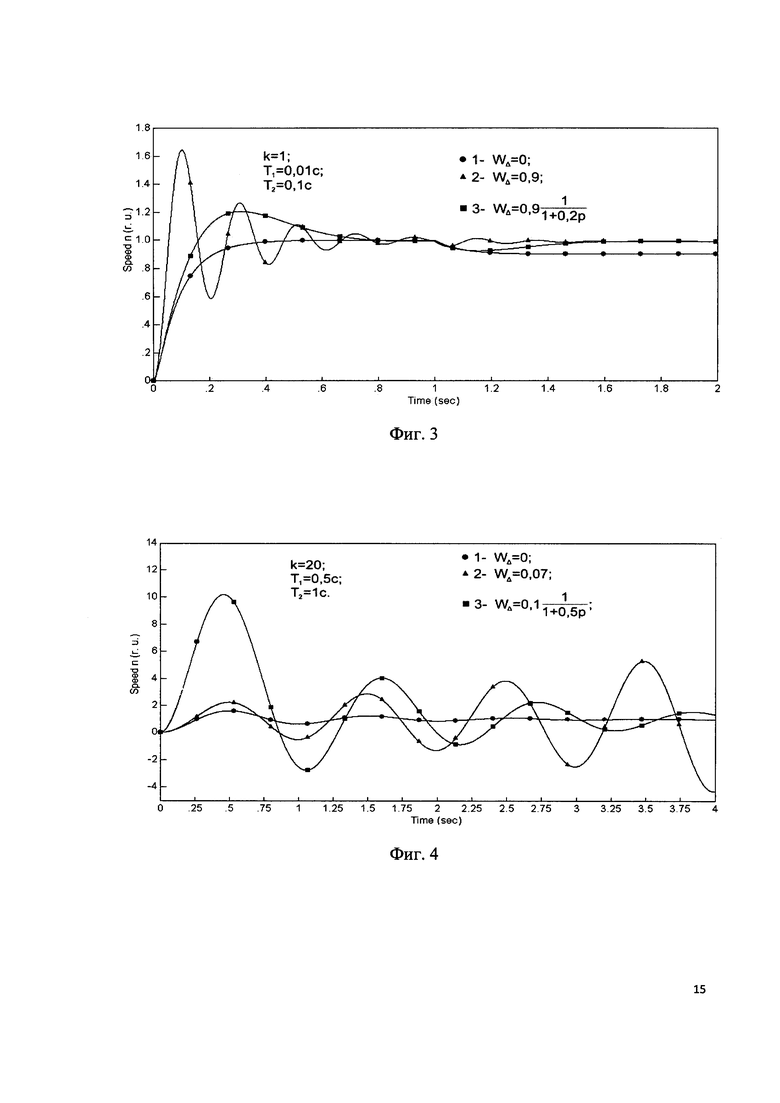
Устойчивость системы с положительной обратной связью подтверждается математическим моделированием и аналитическими расчетами. На фиг. 2 представлена упрощенная структурная схема электропривода с положительной обратной связью по току. Если исходная схема имеет достаточный запас устойчивости, то в процессах отсутствует колебательность. При набросе нагрузки в системе возникает большая ошибка по скорости (диаграмма 1, фиг. 3). Безынерционная ПОС компенсирует ошибки, но ухудшает устойчивость (диаграмма 2, фиг. 3), введение фильтра первого порядка в ПОС возвращает качество переходных процессов и сохраняет компенсацию ошибки (диаграмма 3 фиг. 3)
Если исходная система колебательная (диаграмма 1, фиг. 4), то безынерционная ПОС приводит к асимптотической неустойчивости (диаграмма 2, фиг. 4), а введение фильтра первого порядка - к расходящимся колебаниям (диаграмма 3, фиг. 4), причем результат мало зависит от его параметров. Только введение в ПОС фильтра второго порядка возвращает системе устойчивость (диаграмма 4, фиг. 4).
Приведенные результаты показывают принципиальную возможность и перспективу коррекции динамики САУ положительными обратными связями, в том числе, и исходных колебательных структур. При этом реализовать такую связь значительно проще, чем провести декомпозицию контуров отрицательными обратными связями.
Анализ приведенной выше структуры позволяет пояснить механизмы взаимодействия обратных связей - положительной (ПОС) и отрицательной (ООС).
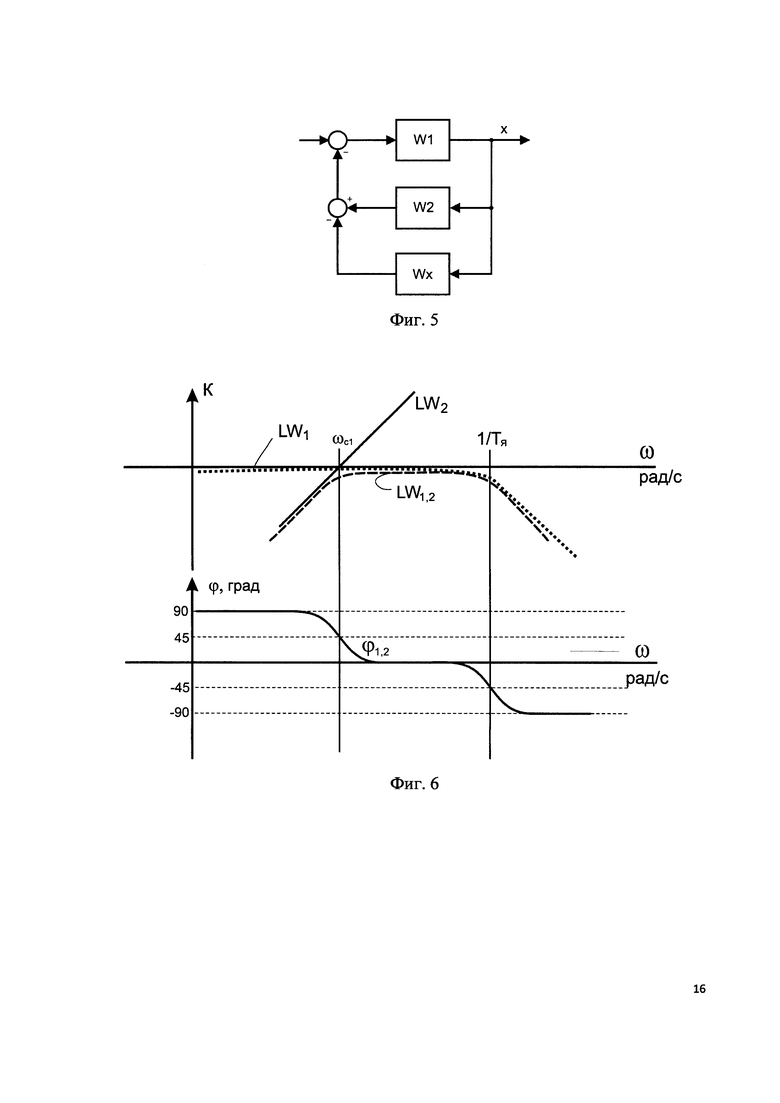
Исходную схему электропривода с положительной обратной связью по току путем преобразований можно представить в виде, изображенном на фиг. 5.
W1 - аналог цепей статора, звено, как правило, близкое к инерционному с частотой среза от 100 до 1000 рад/с. W2 - звено, близкое к интегрирующему, описывающее связь между токами статора и угловой скоростью вращения вала (в АД в этом звене присутствует нелинейный компонент), отрицательная обратная связь ООС - это связь по ЭДС двигателя WX - подбираемое корректирующее звено с ПОС.
Частотная характеристика системы электропривода без ПОС представлена на фиг. 6.
Если ТД звена  и ТЯ звена
и ТЯ звена  близки, то система будет колебательной, если ТД и ТЯ отдалены друг от друга, то процессы - монотонны.
близки, то система будет колебательной, если ТД и ТЯ отдалены друг от друга, то процессы - монотонны.
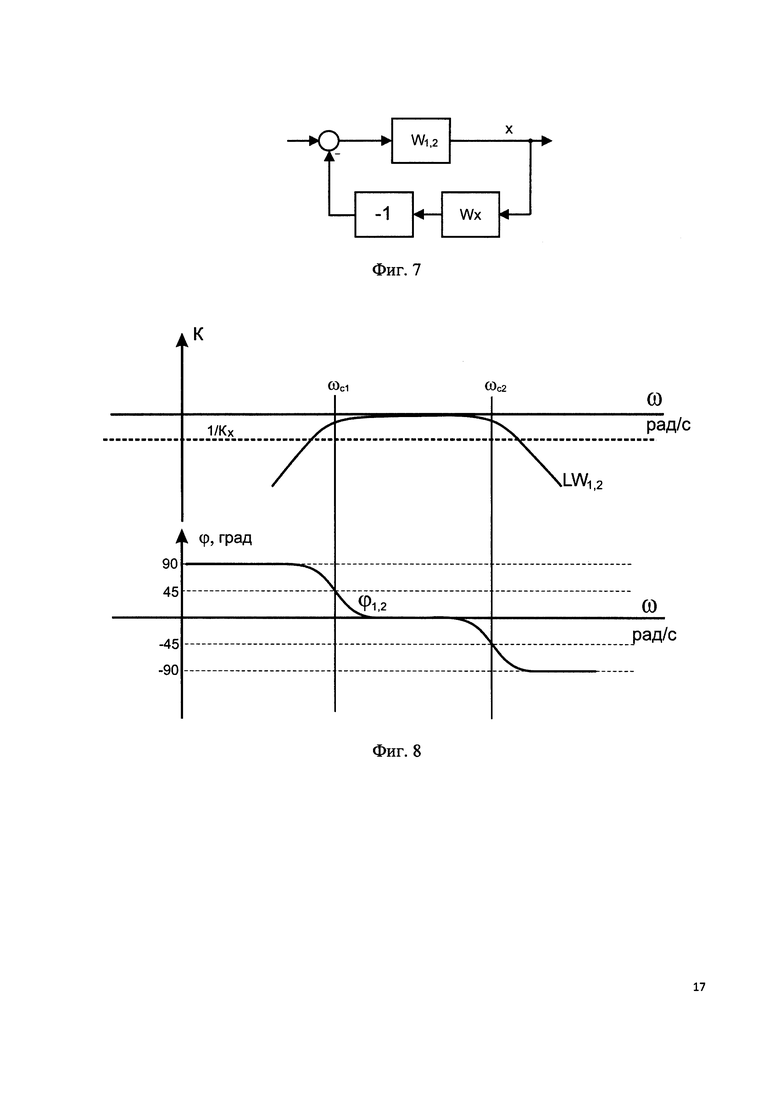
При этом ЛЧХ и ФЧХ в зоне малых частот отражают работу ЭДС в приводе, а в зоне больших - ПОС компенсирует статическую ошибку как показано выше, но нарушает устойчивость системы. Для удобства преобразований это явление образуется в виде структурной схемы электропривода с положительной обратной связью по току (фиг. 7).
Здесь W1(2) - звено с характеристиками, представленными на фиг. 2; WX·-(-1) - звено с АЧХ такой же звено, как и WX·(-1). φX(-1)=-φX+180.
Устойчивость структуры, приведенной на фиг. 5, определяется по критерию Найквиста - на частоте, на которой АЧХ звеньев будет звонить [W1(2)·WX], будет равна единице, суммарная фаза звеньев.


Рассмотрим варианты WX, использованные при моделировании.
A. WX=k. Частотные характеристики системы электропривода с положительной обратной связью по току приведены на фиг. 8.
Очевидно из характеристик, что условия «+» всегда будут выполняться в зоне ωС1 и никогда - в зоне ωС2, т.к. φ1(2)>0 в зоне ωC1 и φ1(2)<0 в зоне ωC2, а φX=0 всегда. То есть, ПОС компенсирует действие противо-ЭДС, что отражается в улучшении статики, но приводит к неустойчивости из-за процессов в статорной цепи.
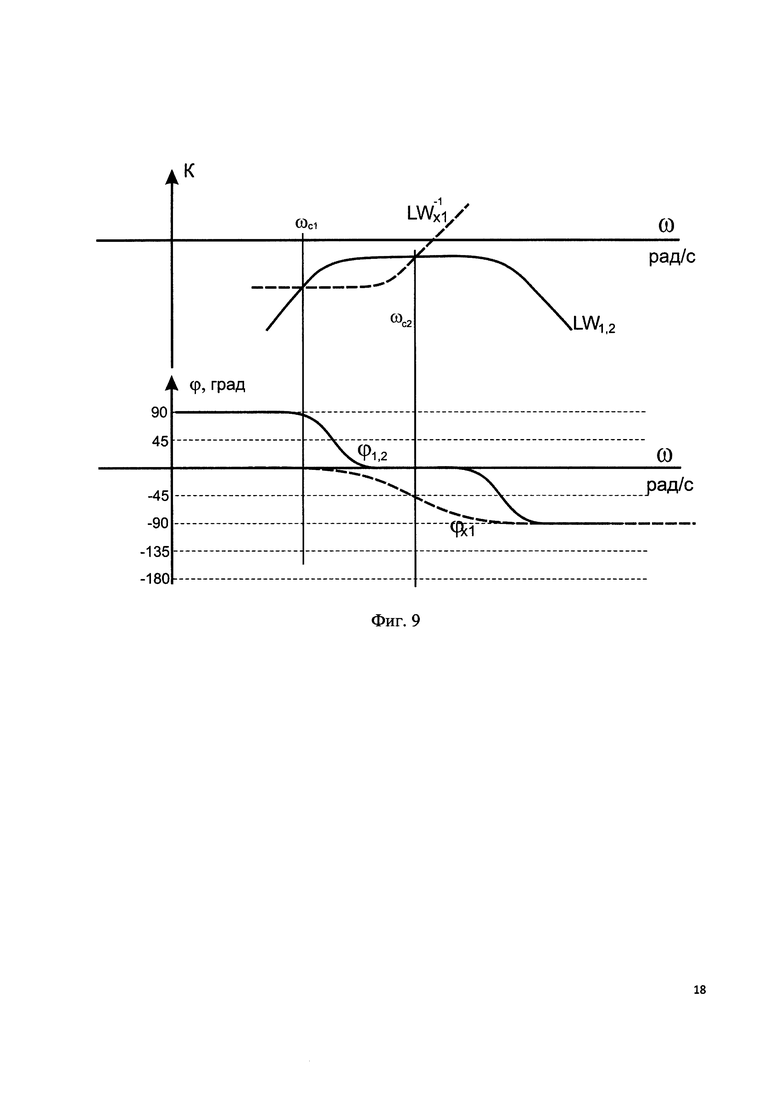
Б.  - инерционное звено первого порядка. Частотные характеристики электропривода с положительной обратной связью по току приведены на фиг. 9.
- инерционное звено первого порядка. Частотные характеристики электропривода с положительной обратной связью по току приведены на фиг. 9.
Частота среза ωC1 не меняется, как и частотные характеристики вблизи нее, а на высоких частотах происходят существенные изменения: ωC2 уменьшается, а фаза звена в ПОС становится отрицательной и при определенных условиях вполне может стать такой, что выполнится условие «+».
Все вышеизложенное подтверждает, что правильно выбранная ПОС позволяет не только компенсировать ошибку в статике, но и скорректировать динамику - устранить колебательность, вызванную противо-ЭДС и улучшить быстродействие, так как корректируются низкочастотные области частотной характеристики привода.
Динамическое звено, корректирующее положительную обратную связь по току статора асинхронного двигателя, обеспечивает технический результат полезной модели, так как увеличивает амплитуду напряжения на статоре двигателя до таких значений, которые при больших нагрузках (до полуторакратного номинального момента электродвигателя) обеспечивает погрешность в поддержании скорости вращения асинхронного электродвигателя не выше 2-3%, при сохранении устойчивости системы электропривода с положительной обратной связью по току.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ эксплуатации в синхронном режиме частотно-регулируемых асинхронных двигателей с фазным ротором | 2018 |
|
RU2694892C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
Изобретение относится к электротехнике, а именно к частотно-регулируемым электроприводам. Устройство управления асинхронным двигателем содержит преобразователь частоты и напряжения, управляющие входы которого соединены соответственно с выходами первого и второго сумматоров. Первый вход второго сумматора соединен с выходом функционального преобразователя, а второй вход - с выходом статического преобразователя. Первый вход первого сумматора соединен с источником сигнала задания и входом функционального преобразователя, а второй вход - с выходом первого статического нелинейного преобразователя. Датчики тока статорной обмотки двигателя, выходы которых соединены с первым и вторым входами функционального преобразователя тока, первый выход функционального преобразователя тока, соответствующий положительной обратной связи по току статора, соединен с входом апериодического звена первого порядка, выход которого соединен с входом статического преобразователя и с входом первого статического нелинейного преобразователя. Технический результат состоит в обеспечении эффективности корректирующей положительной обратной связи по активной составляющей тока статора при сохранении устойчивости системы управления асинхронным электроприводом. 9 ил.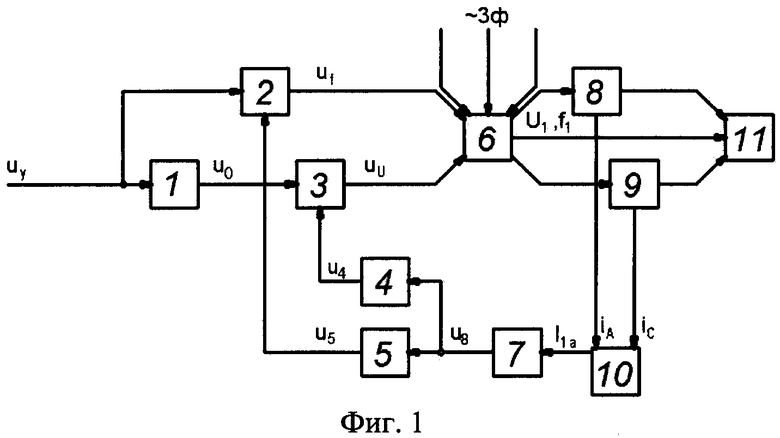
Устройство управления асинхронным двигателем, содержащее асинхронный двигатель и преобразователь частоты и напряжения, управляющие входы которого соединены соответственно с выходами первого и второго сумматоров, первый вход первого сумматора соединен с источником сигнала задания, а второй вход - с выходом первого статического нелинейного преобразователя, первый вход второго сумматора соединен с функциональным преобразователем, вход которого соединен с источником сигнала задания, а второй вход - с выходом статического преобразователя, а также датчики тока статорной обмотки двигателя, выходы которых соединены с первым и вторым входами функционального преобразователя тока, отличающегося тем, что первый выход функционального преобразователя тока, соответствующий положительной обратной связи по току статора, соединен с входом апериодического звена первого порядка, выход которого соединен с входом статического преобразователя и с входом первого статического нелинейного преобразователя.
| Частотно-упавляемый асинхронный электропривод | 1978 |
|
SU716125A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| Форсунка | 1987 |
|
SU1463344A1 |
| US 4451771 A, 29.05.1984 | |||
| US 4581569, 08.04.1986. | |||

