1
Изобретение относится к электротехнике, а ИМёЙЙО к электрическим приводам, пр&дназначенньш для управления положенном или скоростью исполнительного механизма.
Известны следящие электроприводы, охваченные главной обратной связью по выходному параметру, например по угловому положению, содержащие вспомогательную (корректирующую) обратную связь, ,Q предусмотренную для улучшения динами ческих характеристик привода ti 1.
Однако привод не обладает высокой точностью при использовании двигателей перюкгенного тока,,5
Наиболее близким к предлагаемому по технической сущности и решаемым задачам является следящий привод, содержащий измеритель сигнала рассогласования, усилитель н исполнительный двига- 20 гель, включенные последовательно, и вспомогательную обратную связь, в цеПь которой включено корректирующее устройство, снабженное входом по ускорению 2 .
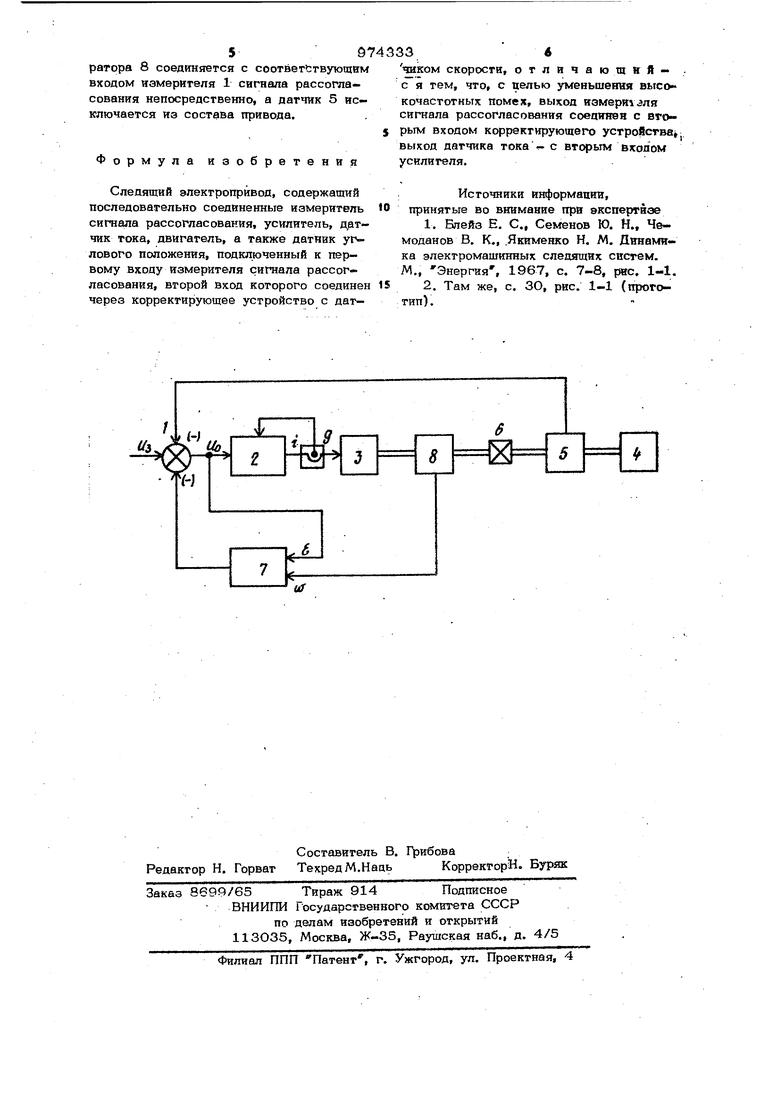
В известном устройстве роль датчика ускорения вьшолняет резистор, включенный последовательно в якорную цепь исполнительного двигателя. Измерение тока якоря исполнительного двигателя для получения информации об угловом ускорении возможно в большинстве электроприводов, в особенности в приводах, работающих на преимущественно инерционную нагрузку. Однако достаточно простыми средствами это достигается только при использовании в качестве исполнительных двигателей машин постоянного тока. В тех случаях, когда в качестве -исполнительных двигателей применяются многофазные машины переменного тока - синхронные и асинхронные, формирование сигнала, пропорционального ускорению, должно предусмат .ривать вьщеление активной составляющей тока каждой фазы и преобразование полученной системы переменных напряжений в напряжение постоянного тока, что приводит к достаточно сложной схемной ре.ализации. Кроме яри ИСПОЛЬЗОВАНИИ в качгестве усилителя магнитных усилителей, а также преобразователей энергии на тиристорах и на транзисторах, работающих в режиме переключений, тз якорных токах двипателя содержатся высокочастотные пульсации, обусловленные, в част ности, ключевым характером работы силовых элементов. Неблагоприятно сказывается на работе привода также налич1ге гальванической связи между силовыми цепями управления,возникающей при использовании измерительных резисторов. Отмеченные особенности ухудшают работу привода. Цель изобретения - уменьшение высокочастотных помех электропривода. Поставленная пель достигается тем, что в следящем электроприводе, содержа щем последовательно соединенные измеритель сигнала рассогласования, усилите датчик.тока, двигатель, а также датчик угловогб положения, подключенный к пер вому входу измерителя сигнала рассогласования, второй вход которого соединей через корректирующее устройство с датчиком скорости, выход измерителя сигнала рассогласования соединен со вто рым входом корректирующего устройства выход датчика тока соединен со BTOpbnsi входом усилителя. На чертеже приведена функциональная схема следящего электропривода. Электропривод содержит измеритель 1 сигнала рассогласования, усилитель 2, двигатель 3, исполнительный механизм 4, датчик углового положения 5, редуктор 6, корректирующее устройство 7, датчик скорости 8, датчик тока 9. Корректирующее устройство 7 снабжено двумя входами по скорости ш и по ускорению t . Вход по скорости корректирующего устройства 7 соединен с выходом датчика скорости 8, а вход по ускорению подключен к выходу измерителя сигнала рассогласования 1, Моментное управление исполнительны двигателем применяется в раде случаев для улучшения динамических характеристик привода, в частности, для уменьше- ния влияния электромагнитной постоянной времени якорной обмотки машины. При использовании в качестве двигателя 3 машины постоянного тока моментвое управление реализуется за счет придания усилителю 2 свойств регулируемого источника тока. С этой целью он охвачен глубокой отрицательной обратной связью ПО выходному току, за счет чего ток якоря двигателя 3 устанавливается строго пропорциональным напряжению на входе усилителя 2, т.е. сигналу рассогласования UQ . Ввиду пропорциональности связи между током якоря и сигналом рассогласования, последний соответствует ускорению привода в той же мере, что и ток якоря, что и обеспечивает реализацию предлагаемого устройства. Оно выгодно отличается от известного электропривода, содержащего измерительный резистор в цепи якоря исполнительного двигателя, отсутствием гальванической связи между. гиловыми цепями и цепями управления, а также тем, что сигнал рассогласования в отличие от напряжения, пропор- ционального току якоря, свободен от высокочастотных пульсаций, обусловленных ключевым (импульсным) характером работы силовых элементов усилителя 2. Отмеченные особенности улучшают характеристики и позволяют ytipcXJTHtb схему электропривода. При использовании в качестве исполнительного двигателя машин переменного тока Моментное- управление достигается за счет применения частотно-токового способа управления, для которого также характерно питание якорных обмоток синхронных и асинхронных двигателей от многофазного управляемого источника тока.. В этом случае предлагаемое устройство отличает от известного еще большее упрощение, так как при использовании машин переменного тока для получения сигнала, проторционального - ускорению за счет измерения тока, необходимо выделить активную составляющую тока каждой фазы и преобразовать полученную систему переменных напряжений и налряжение постоянного тока, что достаточно сложно. По схеме, приведенной на чертеже, был изготовлен и испытан макет следящего электропривода мощностью 450 вт. В качества исполнительного двигателя применена синхронная машина с частотнотоковым (моментным) управлением. Усилитель выполнен на транзисторах, работающих в режиме пераслючения, Экспериментальная проверка подтверждает практическую целесообразность применения следящего электропривода. Предлагаемый следящИй электропривод можетбыть вьтол ен также как скоростной. В этом случае выход тахогене59ратора 8 соединяется с соотбетйтвующнм входом намеригеля 1 сигнала рассогласования непосредственно, а датчик 5 исключается из состава привода. Формула изобретения Следящий электропривод, содержащий последовательно соединенные измеритель сигаала рассогласования, усилитель, д тчик тока, двигатель, а также датник углового положения, подключенный к первому входу измерителя сигнала рассогласования, второй вход которого соединен через корректирующее устройство с дат33«таком скорости, отличаю щяйс я тем, что, с пелью уменьшения высек кочастотных помех, выход иэмеригэля сигнала рассогласования соецштев с вгорым Входом корректирующего устройства выход датчика тока V с вторым входом усилителя. :Источники информации, принятые во внимание при экспертизе 1.Блейз Е. С., Семенов Ю. Н., Чемоданов В. К., .Якименко Н. М. Двнамвка электромашинных следящих систем. М., Энергия, 1967, с. 7-8, рее. 1-1, 2.Там же, с. ЗО, рис. 1-1 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1982 |
|
SU1179264A1 |
| Следящая система с ограниченным углом поворота выходного вала | 1986 |
|
SU1339488A1 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| СЛЕДЯЩАЯ СИСТЕМА С КОМПЕНСАЦИЕЙ ИНЕРЦИОННОСТИ | 1991 |
|
RU2013796C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631784C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
