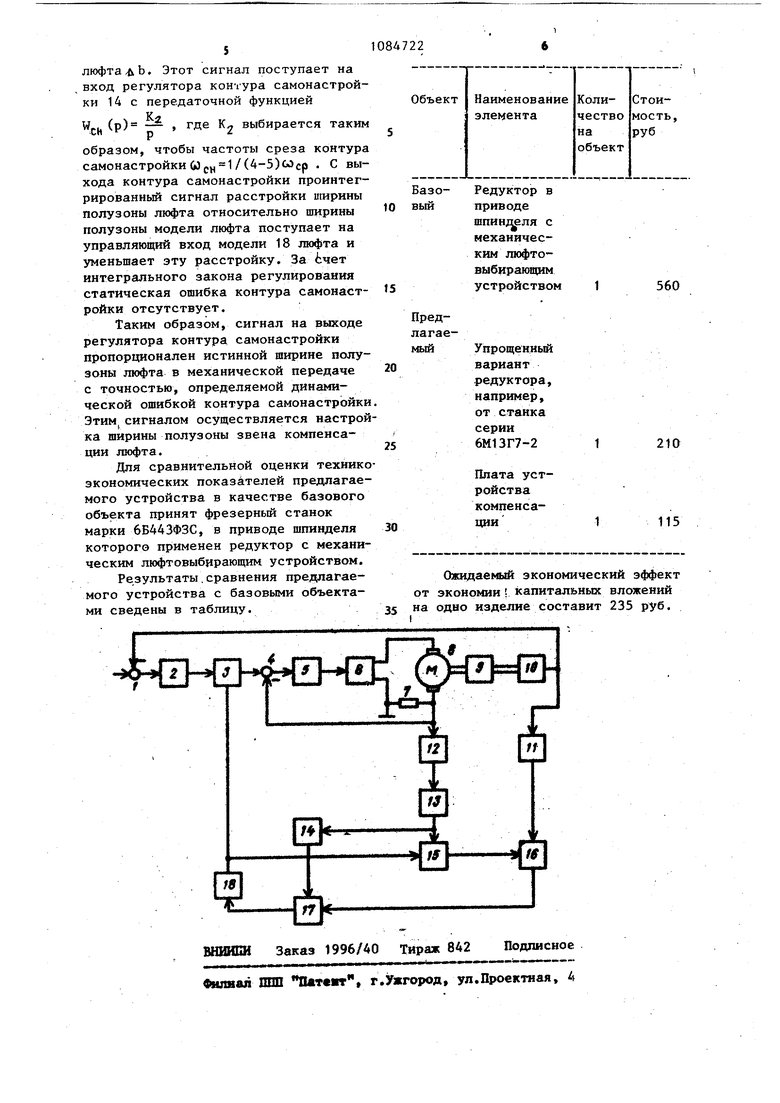
Изобретение относится к автоматическому регулированию и может быть использовано в электромеханических следящих системах с люфтом в механической передаче. Известна следящая система, в которой коррекция люфта в механической передаче осуществляется за счет введения в контур управления исполнительным двигателем нелинейности типа зона нечувствительн.ости с регулируемой шириной зоны. Управление шириной зоны производится сигналом, представляющим из себя модуль сигнала датчика ускорения объекта управления и продифференцированного сигнала тахогенератора, установленно го на валу исполнительного двигателя lj .. Недостатком указанной системы является необходимость в установке дополнительного датчика ускорения и скорости, что усложняет конструкцию механической передачи. Наиболее близким к предлагаемому по технической сущности является уст ройство, в котором использован способ компенсации люфта в механической передаче электропривода. Устройство содержит последовательно соединенные измеритель рассогласования, регулятор положения, звено компенсации люфта, сумматор, регулятор тока, усилитель мощности с датчиком тока и исполнительный электродвигатель, механически соединенный с объектом управления, датчик положения объекта управления, подключенный выходом к первому входу измерителя рассогласоBaidiH, при этом второй вход измерите ля рассогласования является входом устройства, а второй вход сумматора соединен с выходом датчика тока 2 Недостатком известного устройства является невозможность точной компен сации люфта в механической передаче исполнительного устройства из-за изменения в процессе эксплуатации истинной ширины полузоны люфта, котора зависит от температуры окружающей среды, степени износа и материалов элементов исполнительного устройства. В системе автоматического управления электроприводом может возникнуть режим автоколебаний, что, увеличивает погрешность управления электроприводом. Цель изобретения - увеличение точности управления путем компенса, дни люфта переменной ширины в механической передаче. Указанная цель достигается тем, что в устройство, содержащее последовательно соединенные измеритель рассогласования, регулятор положения, звено компенсации люфта, сумматор, регулятор тока, усилитель мощности с датчиком тока и исполнительный электродвигатель, механичес:ки соединенный с объектом управления, датчик положения объекта управления, подключенный выходом к первому входу измерителя рассогласования, при этом второй вход измерителя рассогласования является входом устройства, а второй вход, сумматора соединен с выходом датчика тока, введены последовательно соединенные первый полосовой фильтр, фазовый дискриминатор, блок умножения и регулятор контура самонастройки, последовательно соединенные второй полосовой фильтр, модель линейной части объекта и амплитудный детектор, а также модель люфта, подключенная к выходу регулятора, контура самонастройки и к второму входу звена компенсации люфта, а выходом - к второму входу фазового дискриминатора выход амплитудного детектора соединен с вторым входом блока умножения,- второй вход модели люфта.подключен к входу амплитудного детектора, а входы первого и второго пoлocoвьix фильтров соединены с выходами датчика положения объекта управления и датчика тока соответственно. На чертеже приведена функциональная схема предлагаемого устр6йст7 ва. Устройство для предотвращения автоколебаний в следящей системе содержит измеритель 1 рассогласования, регулятор 2 положения, звено 3 компенсации люфта, сумматор 4, регулятор 5 тока, усилитель 6 мощности с датчиком 7 тока, исполнительный электродвигатель 8, объект 9 управления, датчик 10 положения объекта управления, первый полосовой фильтр 11, фазовый дискриминатор 12, блок 13 умножения, регулятор 14 конту)а самонастройки, второй полосовой фильтр 15, модель 16 линейной части объекта, амплитудный детектор 17, модель 18 люфта. Устройство работает следующим образом. Следящая система, состоящая из блоков 1-10, построена по принципу подчиненного регулирования с настро кой внешнего контура на симметричный оптимум. Асимптотическая частотная характеристика внешнего контура следящая система типа 3-1-3, т.е. следящая система имеет астатизм третьего порядка, что позволяет существенно повысить ее точностные по казатели. Внутренний подчиненный контур замкнут по току якоря исполнительного двигателя и настроен на оптимум по модулю. Такая организация следящей системы позволяет упростить структуру регуляторов 2 положения и 5 тока, организовать отсечку по якорному току исполнител ного двигателя на уровне максимальн допустимого значения. При наличии в механической передаче исполнитель|ный двигатель - объект управления люфта в системе возникает режим автоколебаний, при котором резко ухудшаются точностные характеристики следящего привода. Устранение ре жима автоколебаний осуществляется путем введения во внешний контур ел дящей системы звена 3 компенсации люфта, имеющего статическую характе ристику dX8x(t X,.,(t)Xn(t)+b,i. sign где Xg,(t) сигнал на входе звена компенсации люфта; W сигнал на выходе звена компенсации люфта; ширина полузоны звена компенсации люфта. При равенстве приведенной к объ ективу ширины полузоны звена компен сации люфта ширине полузоны люфта осуществляется полная компенсация действия люфта в механической перед че и следящая система приближается по своим динамическим характеристик к линейной системе. Однако из-за ряда факторов, пере-50 численных вьше, истинная ширина полузоны люфта в механической передаче может изменяться. При этом может возникнуть недокомпенсация люфта, когда приведенная к объекту ширина полузо- 55 ны звена компенсации люфта меньше истинной ширины полузоны люфта, и перекомпенсация, когда приведенная к dt 7224 объекту ширина полузоны звена компенсации люфта больше истинной ширины полузоны люфта. Для выделения величины истинной ширины полузоны люфта выходные сигналы датчиков 7 тока и 10 положения пропускаются через полосовые фильтры 11 и 15. Полосовые фильтры выполнены идентичными с полосой пропускания ограниченной зоной возможных автоколебаний следящей системы, которая для конкретной системы лежит в пределах {0,35-1)сОср -С выхода полосового фильтра 15 сигнал поступает на модель линейной части обьекта, которая при частоте среза внутреннего токового контура равной (3-4)с)ср выполнена из двух последовательно включенных интеграторов с суммарной передаточной функцией: .н( где К Далее сигнал с выхода модели линейной части объекта поступает на модель 18 люфта с шириной полузоны регулируемой сигналом, поступающим с выхода регулятора 14 контура амонастрой ки. Фазовый дискриминатор 12 вырабатывает сигнал, пропорциональный разности фаз сигналов с выхода модели 18 люфта и с выхода полосового фильтра 11, которая является функцией разности ширины полузоны люфта и ширины полузоны модели люфта Д b ,Г2 С выхода фазового дискриминатора 12 сигнал поступает на первый вход блока 13 умножения. На второй вход блока умножения поступает сигнал с выхода амплитудного детектора 17, который пропорционален амплитуде колебаний на входе модели 18 люфта Р W в полосе частот возможных автоколебаний следящей системы, где W.-л (р) передаточная функция линейно части объекта управления. На выходе блока умножения при выполнении вьппё линераризации статических характеристик сигнал пропорционален разности ширины полузоны люфта и ширины полузоны модели
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| Устройство коррекции для компенсации упругого резонанса в электромеханических системах | 1981 |
|
SU991365A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1241394A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ АВТОКОЛЕБАНИЙ В СЛЕДЯЩЕЙ СИСТЕМ Содержащее последовательно соединенные измеритель рассогласования, регулятор положения, звено компенсации люфта, сумматор, регулятор тока, усилитель мощности с датчиком тока и исполнительный электродвигатель, механически соединенный с объектом управления, датчик положения объекта управления, подключенный выходом к первому входу измерителя рассогласр- вания, при этом второй вход измерителя рассогласования является входом устройства, а второй вход сумматора соединен с выходом датчика тока, отличающееся тем, что, с целью увеличения точности управления путем компенсации люфта переменной ширины в механической передаче, в него введены последовательно соединенные первый полосовой фильтр, фазовый дискриминатор, блок умножения и регулятор контура самонастройки, последовательно соединенные второй полосовой фильтр, модель линейной части объекта и амплитудный детектор, а также модель люфта, подi ключенная к выходу регулятора контура самонастройки и к второму входу (Л звена компенсации люфта, а выходом к второму входу фазового дискриминатора, выход амплитудного детектора соединен с вторым входом блока умноГ жения, второй вход модели люфта подключен к входу амплитудного детектора, а входы первого и второго полосоо эо вых фильтров соединены с выходами датчика положения объекта управления . и датчика тока соответственно.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящая система | 1975 |
|
SU718833A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU234010A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
