Изобретение относится к системам автоматического регулирования и управления и, в частности, к электрическим следящим системам. Оно может быть использовано в следящих приводах с исполнительными двигателями постоянного тока, моментными двигателями [1] или бесконтактными двигателями постоянного тока (БДПТ).
Известны точные безредукторные, быстродействующие и малоскоростные следящие приводы, в которых используются такого типа двигатели [2, 3, 4].
Наиболее близкой по сути можно принять оптическую или фотоэлектрическую систему слежения за целью, например, описанную в [5]. При редукции i=1 такая система превращается в безредукторную точную систему. За счет этого снижаются большие погрешности, вызванные люфтами и упругостями редуктора.
Однако непосредственное сочленение двигателя с нагрузкой приводит к увеличению момента инерции и, следовательно, к инерционности динамических погрешностей от управляющего и возмущающего воздействий. Это является основным недостатком таких следящих приводов. Кроме того, малые перемещения и малые скорости нагрузки безредукторных точных следящих приводов (см. [4]) затрудняют съем и точное измерение этих параметров и тем самым снижают эффективность обратных связей по этим параметрам, особенно по перемещению.
Целью изобретения является расширение полосы рабочих частот и повышения точности системы.
Цель достигается тем, что в следящую систему, содержащую измеритель рассогласования, дифференциальный усилитель мощности, исполнительный двигатель, соединенный с объектом, выход которого связан с датчиком положения, выход которого подключен к первому инвертирующему входу измерителя рассогласования, второй неинвертирующий вход которого является входом системы, а третий инвертирующий вход соединен с выходом корректирующего устройства, вход которого соединен с выходом датчика скорости, установленного на объекте, введено устройство компенсации сопротивления обмотки якоря исполнительного двигателя, выполненное в виде трех последовательно соединенных резисторов, первый вывод первого из которых является входом устройства и соединен с выходом измерителя рассогласования, второй вывод третьего резистора соединен с началом обмотки якоря исполнительного двигателя, конец которой соединен с шиной нулевого потенциала, общие выводы первого и второго резисторов и третьего резистора и начала обмотки якоря исполнительного двигателя подсоединены соответственно к неинвертирующему и инвертирующему входам дифференциального усилителя мощности, выход которого соединен с общим выводом второго и третьего резисторов, причем отношение первого и второго резисторов равно отношению сопротивления обмотки якоря исполнительного двигателя и третьего резистора, а корректирующее устройство выполнено в виде двойного дифференцирующего звена.
Сопоставление с прототипом показывает, что заявляемое устройство отличается наличием цепочки резисторов, новым способом их подключения и соответствующим отношением их номиналов, при котором обеспечивается компенсация сопротивления обмотки якоря двигателя, то есть устройство соответствует критерию изобре- тения "новизна".
Сравнение с другими техническими решениями показывает, что предлагаемые простые средства позволяют повысить быстродействие и точность следящей системы, что соответствует критерию "существенные отличия".
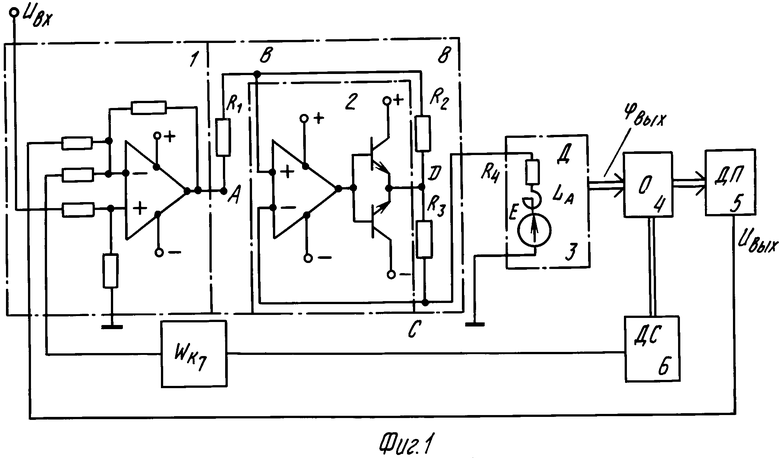
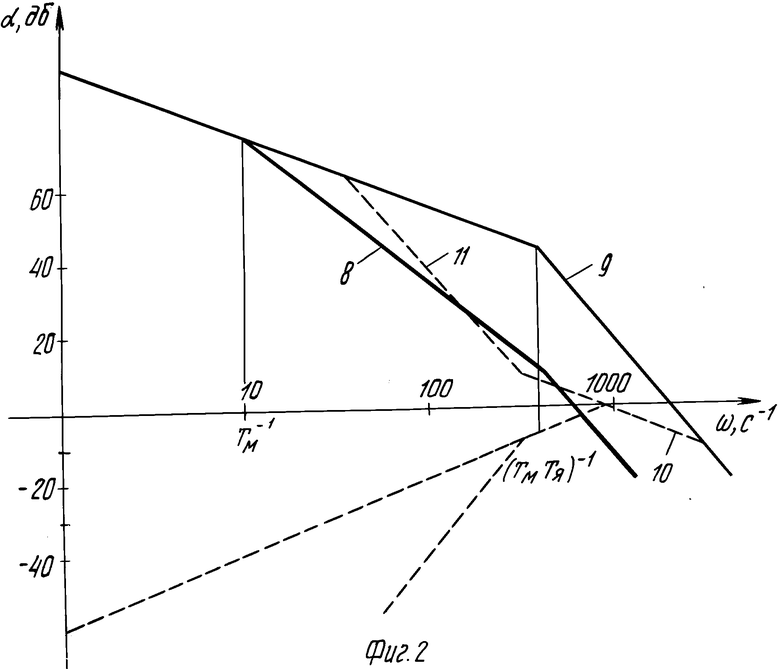
На фиг. 1 представлена схема следящей системы с компенсацией инерционности; на фиг.2 представлены логарифмические амплитудно-частотные характеристики (ЛАЧХ) разомкнутой системы для прототипа (кривая 8) и предлагаемого изобретения (кривая 9), а также скорректированная характеристика предлагаемого изобретения с участками 10 и 11.
Предлагаемое устройство содержит измеритель 1 рассогласования, дифференциальный усилитель 2 мощности, последовательно включенные три резистора R1, R2 и R3, исполнительный двигатель 3 с обмоткой якоря R4, объект 4, механически соединенный с двигателем, датчик 5 угла, механически соединенный с объектом, электрический выход которого подключен к инвертирующему входу измерителя рассогласования, датчик 6 скорости и корректирующее звено, выполненное из двойного дифференцирующего звена 7, выход которого также подключен к инвертирующему входу измерителя рассогласования, а вход соединен с выходом датчика скорости. Выход измерителя рассогласования подключен к первому выводу резистора R1. Неинвертирующий вход усилителя 2 включен между резисторами R1, R2, а инвертирующий - между резисторами R3, R4, выход - между резисторами R2, R3. Отношение резисторов R1/R2 принято равным отношению R4/R3, причем R1/R2>>1. Резисторы R1, R2, R3 образуют устройство компенсации сопротивления обмотки якоря исполнительного двигателя 8.
Устройство работает следующим образом. При поступлении на вход измерителя 1 рассогласования управляющего воздействия - Uвх, а также напряжения обратной связи Uвх и напряжения с корректирующего звена 7 на выходе измерителя рассогласования в точке А (на входе резистора R1) появится управляющее напряжение U1. Дифференциальный усилитель мощности, включенный входом в точки В и С (см. фиг.1), выработает на своем выходе (в точке D) такое напряжение, при котором напряжение между точками В и С будет практически равным нулю: UВ ≈UС (коэффициент усиления усилителя мощности достаточно велик). При этом напряжение на резисторе R2 (UВ) будет равно напряжению на резисторе R3 (UC). Из равенства отношений резисторов: R1/R2=R4/R3 или R1/R4= R2/R3 следует равенство отношений напряжений: UA/UB=UE/UD (здесь UA и UE соответственно - напряжения на резисторах R1 и R4) или равенство UA=UE (учитывая, что UB=UC). Отсюда следует, что управляющее напряжение прикладывается к обмотке якоря двигателя, минуя активное сопротивление обмотки R4. Таким образом, схема компенсирует резистор R4 и при любых управляющих напряжениях и возмущениях можно принять R4=0. Это существенным образом сказывается на динамике привода.
Считая усилители достаточно быстродействующими, динамику привода можно описать, рассматривая разомкнутую систему и пользуясь уравнением в операторном виде: =
=  TмTяS2+ TмS+1
TмTяS2+ TмS+1 S·ϕвых +
S·ϕвых +  , (1) где K1 - коэффициент усиления измерителя рассогласования;
, (1) где K1 - коэффициент усиления измерителя рассогласования;
Се и См - коэффициенты пропорциональности двигателя по скорости и по моменту; Тм и Тя - электромеханическая и электромагнитная постоянные времени двигателя; rя - активное сопротивление обмотки управления двигателя (равно R4); ϕв - выходная координата нагрузки; Мв - возмущающий момент нагрузки; S - оператор Лапласа. Постоянные времени двигателя выражаются через параметры двигателя следующим образом:
Tм =  , Tя =
, Tя =  , где Io - общий момент инерции двигателя и нагрузки; Lя - индуктивность обмотки якоря. Подставляя эти выражения постоянных времени в уравнение (1) и принимая rя=0 (для случая предлагаемого изобретения), получим
, где Io - общий момент инерции двигателя и нагрузки; Lя - индуктивность обмотки якоря. Подставляя эти выражения постоянных времени в уравнение (1) и принимая rя=0 (для случая предлагаемого изобретения), получим =
=  TмTяS2+ TмS+1
TмTяS2+ TмS+1 S·ϕвых +
S·ϕвых +  (2)
(2)
Из выражения видно, что по сравнению с (1) исчез член Тм˙S и изменилось выражение при Мв. В связи с этим, как видно на фиг.2, ЛАЧХ для предлагаемого изобретения имеет продленный первый наклон, который переходит сразу в третий наклон. Для прототипа первый наклон кончается раньше, при ω=Тм-1. Второй наклон срезает частотную характеристику и третий наклон начинается ниже при значении ω=(Тм˙Тя)-1, чем в случае предлагаемого изобретения. За счет этого рабочая полоса частот для предлагаемого изобретения оказывается шире, и погрешности по управляющему воздействию снижаются. Для реализации этой возможности необходимо формирование в скорректированной ЛАЧХ после первого наклона - 10 сразу четвертого - 11 (см. на фиг.2). Первый наклон реализуется обратной связью по скорости, а четвертый - за счет введения в обратную связь корректирующего звена, выполняющего двойное дифференцирование (например, две RC-цепочки).
Изменившееся выражение при Мв показывает, что в случае предлагаемого изобретения исчезает член с нулевой степенью S, то есть устраняется линейная связь между S˙ϕвых и Мв, и остается связь S˙ϕвых с S˙Mв, то есть скорость выходной координаты уже не зависит от возмущающего момента, а только от скорости изменения возмущающего момента, иными словами, постоянный возмущающий момент на выходную скорость не влияет. Таким образом, следящий привод приобретает астатизм по возмущающему воздействию, в связи с чем улучшается качество следящего привода, существенно уменьшаются его погрешности по возмущению.
Улучшение точности количественно можно показать, используя коэффициенты ошибок. Для прототипа, используя уравнение (1), по управляющему воздействию можно записать (S) =
(S) =  =
=  C0+C1S+C2S2+ ...
C0+C1S+C2S2+ ...
 Uвх , (3) где Co, C1, C2, . .., Cn - коэффициенты ошибок по управляющему воздействию (Со) и его производным (С1 . . . Сn). Решая уравнения путем выделения членов по степеням S, можно получить:
Uвх , (3) где Co, C1, C2, . .., Cn - коэффициенты ошибок по управляющему воздействию (Со) и его производным (С1 . . . Сn). Решая уравнения путем выделения членов по степеням S, можно получить:
Co =  ; C1 = -
; C1 = -  ; C2 =
; C2 =  ;
;
C3 = -  +
+
Для предлагаемого изобретения, используя уравнение (2), по управляющему воздействию можно получить аналогичные вычисления: (S) =
(S) =  =
=  C
C +C
+C S+C2S2+ ...
S+C2S2+ ...
 Uвх, (4) откуда C
Uвх, (4) откуда C =
=  ; C
; C = 0; C
= 0; C =
=  ; C
; C = 0
= 0
Идеальной отработке управляющего воздействия (без погрешностей) соответствует Со (или Соl), равное СЕ-1 и С1, С2, С3, ... (С1l, C2l, C3l...), равные нулю. Сопоставление коэффициентов показывает, что для предлагаемого изобретения отработка управляющего воздействия производится более точно, а не равный нулю коэффициент ошибки по второй производной - С2l меньше по значению, чем соответствующий ему коэффициент (так как Тя<< Tм).
Выполняя аналогичные выкладки по возмущающему воздействию, можно из уравнения (1) записать для прототипа:
ϕвых(S) =  =
=  do+d1S+d2S2+ ...
do+d1S+d2S2+ ... , (5) откуда do= -1, d1=Tм-Tя; d2=2TмTя-Тм2; d3=Тм3+ТмТя(Тя-3Тм)
, (5) откуда do= -1, d1=Tм-Tя; d2=2TмTя-Тм2; d3=Тм3+ТмТя(Тя-3Тм)
Для предлагаемого изобретения по возмущающему воздействию из уравнения (2) можно получить аналогичную (5) зависимость:
ϕвых =  = -
= -  ·
·  =
=
=  d
d + d
+ d S+d
S+d S+ ...
S+ ... Tя
Tя (6)
(6)
Для сопоставления этого выражения с (5) необходимо учесть, что в (6) справа участвует не возмущающий момент Ме, а производная от момента S˙Mв, в связи с чем do=0. Из выражения (6) видно, сопоставляя с (5), что в качестве коэффициентов при производных необходимо брать сомножители:
do′Тя=0; d1′=Тя=-Тя, d2′Тя=0
d3′Тя=ТмТя2, d4′Тя=0
Cопоставляя эти коэффициенты с соответствующими коэффициентами для прототипа, можно видеть, что даже не равные нулю коэффициенты для предлагаемого изобретения меньше соответствующих коэффициентов для прототипа (учитывая, что Тя<< Тм):
d′=Тм-Тя> d1′Т
d1′Т =
= -T
-T ,
,
d3=Tм3+ТмТя2-3Тм2Тя>d3′Тя=ТмТя2
Из этого следует, что возмущающее воздействие от момента для предлагаемого изобретения значительно меньше, чем для прототипа, причем сам момент вызывает нулевую погрешность для предлагаемого изобретения (имеет место астатизм по возму- щению).
Таким образом, как по управляющему воздействию, так и по возмущающему моменту составляющие ошибок для предлагаемого изобретения значительно меньше, чем для прототипа, использование предлагаемого изобретения позволит существенно улучшить точность безредукторной следящей системы, которая уже считается значительно более точной, чем обычная редуктор- ная система. Дальнейшее улучшение обычной следящей системы (в смысле повышения точности) считается чрезвычайно трудной задачей, поскольку затруднено получение информации о координате и скорости. Предлагаемое изобретение позволяет еще больше увеличить точность, причем чрезвычайно простыми средствами - введением простой цепочки резисторов и простого корректирующего звена (в виде двух RC-цепочек). При этом не используется новая информация по обратным связям. Указанные средства (при соблюдении соотношений между параметрами резисторов) позволят, например, улучшить точность таких приводов, как приводы оптических или лазерных сканеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Следящая система | 1985 |
|
SU1325402A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| Следящий электропривод | 1980 |
|
SU974333A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
Изобретение относится к системам автоматического регулирования и управления, в частности к электрическим следящим системам. Целью изобретения является расширение полосы рабочих частот и повышение точности. Следящая система содержит измеритель рассогласования, дифференциальный усилитель мощности, исполнительный двигатель, объект, датчик угла, датчик скорости, корректирующее звено, устройство компенсации сопротивления обмотки якоря исполнительного двигателя, образованное тремя последовательно соединенными резисторами. 2 ил.
СЛЕДЯЩАЯ СИСТЕМА С КОМПЕНСАЦИЕЙ ИНЕРЦИОННОСТИ, содержащая измеритель рассогласования, дифференциальный усилитель мощности, исполнительный двигатель, соединенный с объектом, выход которого связан с датчиком угла, выход которого подключен к первому вычитающему входу измерителя рассогласования, второй суммирующий вход которого является входом системы, а третий вычитающий вход соединен с выходом корректирующего звена, вход которого соединен с выходом датчика скорости, установленного на объекте, отличающийся тем, что, с целью расширения полосы рабочих частот и повышения точности системы, в нее введено устройство компенсации сопротивления обмотки якоря исполнительного двигателя, выполненное в виде трех последовательно соединенных резисторов, первый вывод первого из которых является входом системы и соединен с выходом предварительного усилителя, второй вывод третьего резистора соединен с началом якорной обмотки исполнительного двигателя, конец которой соединен с шиной нулевого потенциала, общие выводы первого, второго и третьего резисторов и начала обмотки якоря исполнительного двигателя подсоединены соответственно к неинвертирующему и инвертирующему входам дифференциального усилителя мощности, выход которого соединен с общими выводами второго и третьего резисторов, причем отношение первого и второго резисторов равно отношению сопротивления обмотки якоря исполнительного двигателя и третьего резистора, а корректирующее устройство выполнено в виде двойного дифференцирующего звена.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Бесекерский В.А., Попов Е.П | |||
| Теория систем автоматическогорегулирования | |||
| М.: Наука, 1966, с.454-459, рис.11, 27. | |||
