1
Изобретение относится к эпектротех« нике, а именно к сннхронизнрованн мь1у электроприводу, содержащему несколько вентильных двигателей, н может найти применение в построении систем синхронного вращения нескольких механических несвязанных валов в широком диапазоне изменения нагрузки.
Известен многодвигательный электропривод, причем каждый двигатель содер fg жит синхронную машину с датчиком; попо-: жения ротора н коммутатор. В а.&яяам : . электроприводе выход датчика положения ротора предыдущего двигателя подключен ко входу коммутатора последукяпего 15 образуя кольцевую схему |д.
Недостатком данного эпектропрввоАй является низкая устойчивость, скаояяостЬ, к автоколебаниям при включении в КОШУ цевую схему свьпие двух двигателей. 29
Известен многодвч1:ательный электропривод, содержащий несколько синхронных мащин с датчикок попожения ротрра на каждой, общий коммутатор и заявнтегш рассогласования сигналов датчика положения ротора по частоте и фазе.
Синхронное вращение механически не4 связанных вапов обеспечивается за счет выявления электродвигателя, ротор кото- рого является отстающим по углу поворота от других роторов электродвигателей, iH управления общим коммутатором по сигналам датчика положения ротора этого электродвигателя
Недостатком иавестиого электропрт- вода являются низкие энергетические по казателн электрсяривода при различных величинах моментов нагрузки на электродвягйтедях. Это объясняется тем, что ;свихровиафзгкщий момент в электроорв воде обеспечивается за счет ьоздней Koltмутаоин менее нагруженных электродшfaтeneй, что сопряжено е ухудшением энергетаческих показателей.
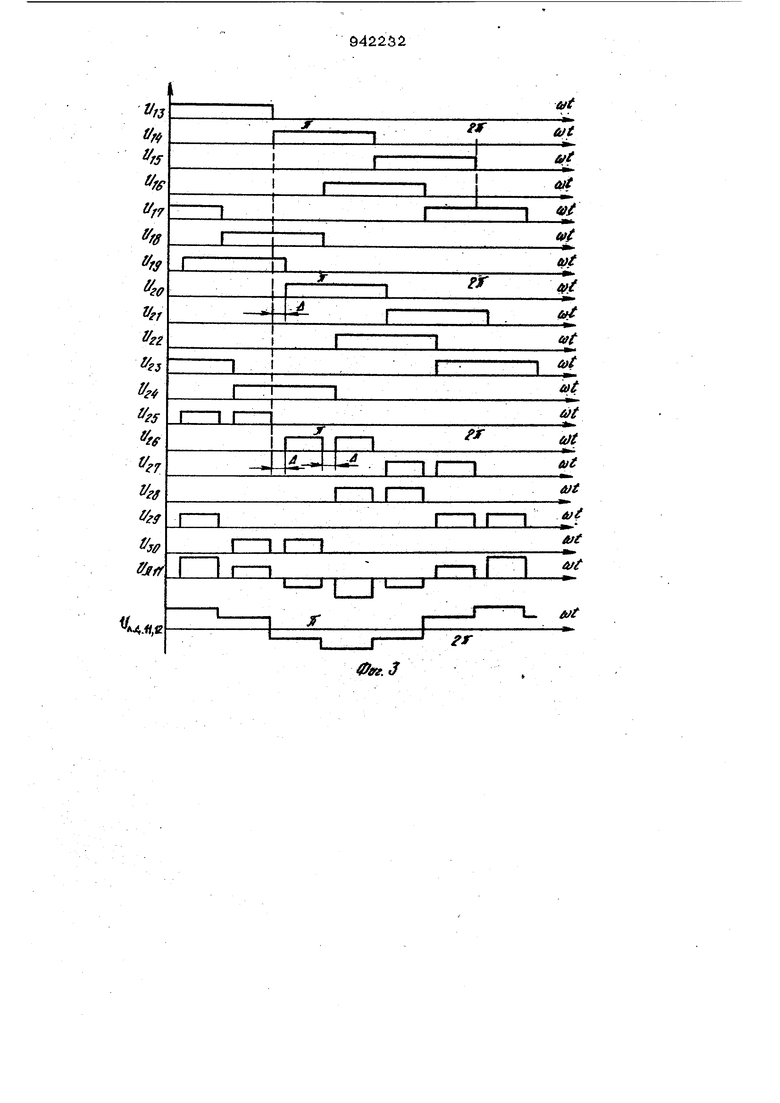
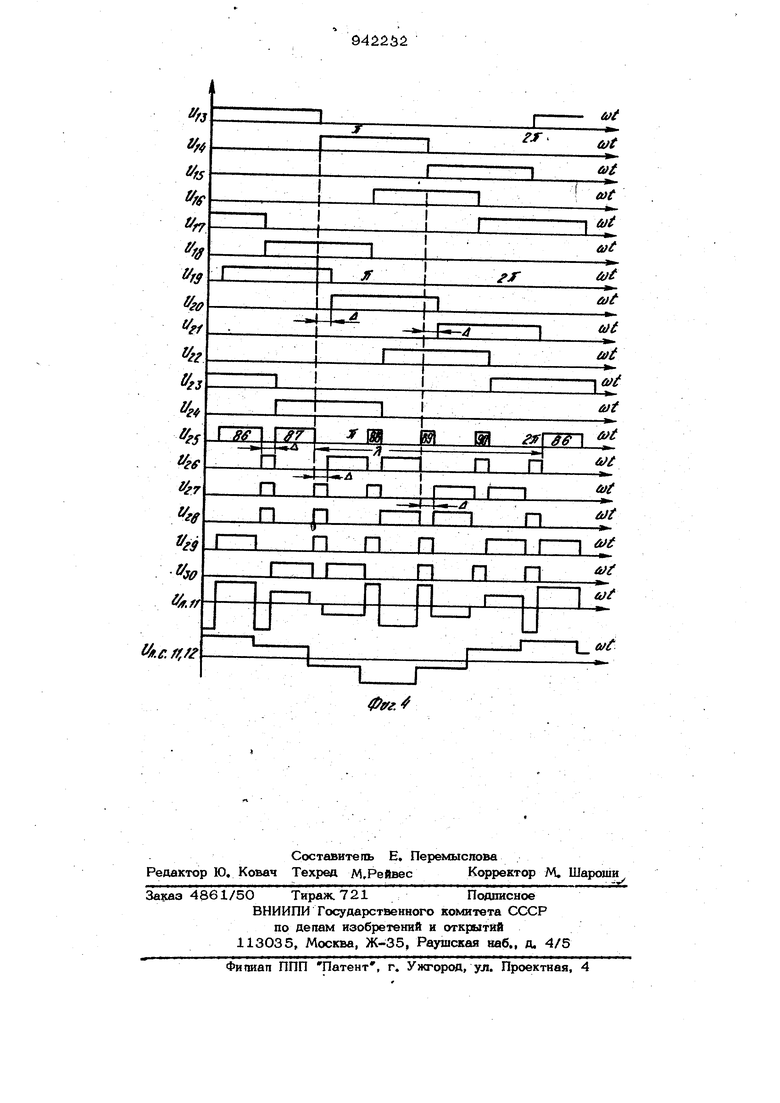
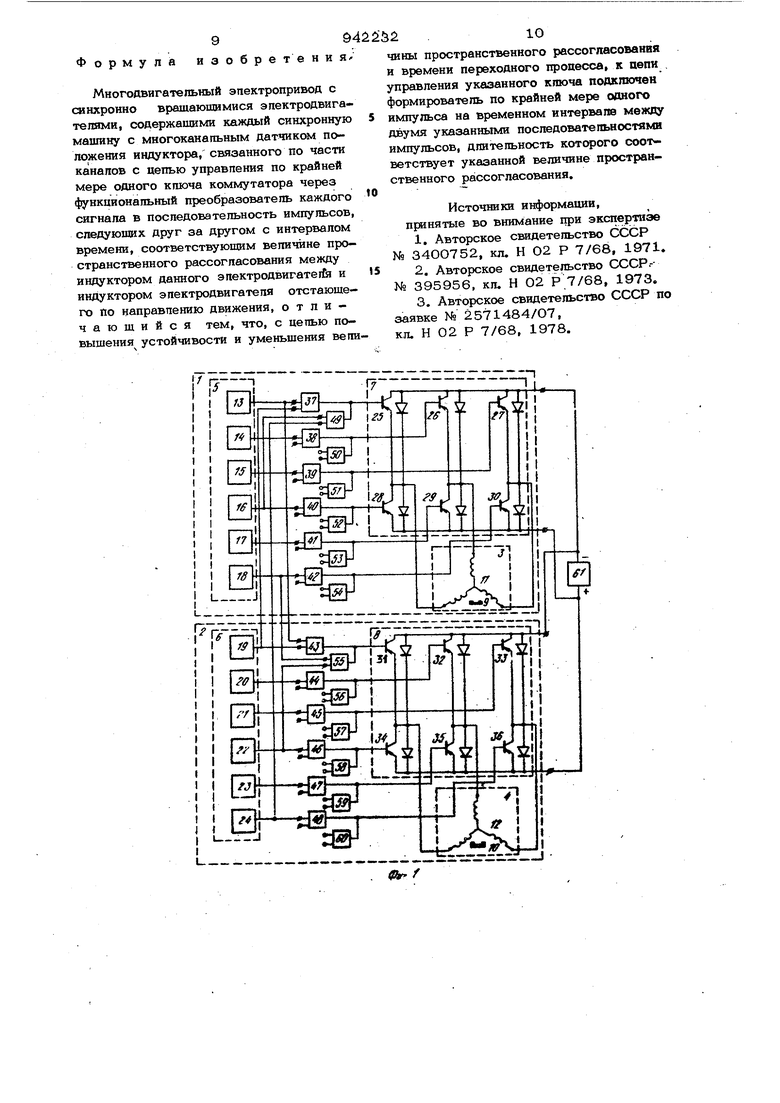
Наиболее,близким к предлагаемому по технвчес1с6й сущности является также многодвигательный электропривод с CRH-I ;фовко врашакжшмися электродвигателя)- . Kffl, содержащими каждый синхронную машину с многоканальным датчиком попо. жения индуктора и коммутатор , В этом устройстве синхронное вращение механически несвязанных вапов эпек тродвигатепей обеспечивается за счет того, что многоканальный датчик положения индуктора связан по части каналов с целью управления по крайней мере од кого кгаоча коммутатора через функциональный преобразователь каждого сигнала датчика в последовательность импульсов, следующих друг за другом с интервалом времени, соответствующим величинепространственного рассогласования между индуктором данного электродвигателя и индуктором отстающего по направ лению движения 3j. Однако данное устройство обладает не достаточной устойчивостью и значитесьными величинами пространственного рассогласования и временем переходного процесса при разных возмущающих воздействиях. Цепь изобретения - повыщёние устойчивости и уменьшение величины простран ственного рассогласования и времени переходного процесса многодвигатепьного электропривода. Поставленная цель достигается тем, что в многодвигательном элёктрс приво- де с синхронно вращающимися электродви гателями, содержащими каждый синхронную машину с многоканальным датчиком положения индуктора, связанного по части каналов с цепью управления по крайней мере одного ключа коммутатора через функциональный преобразователь каж дого сигнала в последовательность импу сов, следующих один за другим с интервалом времени, соответствующим величине пространственного рассогласования между индуктором данного электродвигателя и индуктором электродвигатеЛЯ отстающего по направлению движения дополните гшно к цели управления указанного ключаподключен формирователь по крайней мере одного импульса на времен ном интервале между двумя указанными последовательностями импульсов, длитель ность которого соответствует указанной величине пространственного рассогласования. На фиг. 1 изображена блок схема двухдвигательного электропривода; на фнг. 2 - пример реализации на элементах логики функционального преобразователя и формирователя; на фиг. 3 - диаграмма напряжений в узлах известного двухдвигательного электропривода; на фиг. 4 - диаграмма напряжений в узлах предлагаемого двухдвигательного электро привода. На фиг. 1 для примера изображен двухдвигательный электропривод с .двумя элек тродвигателями 1 и 2. Электродвигатели 1 и 2 содержат соответственно синхронные машины 3 и 4 с многоканальными датчиками 5 и 6 положения индуктора и двухполупериодные коммутаторы 7 и 8. Синхронные машины могут быть любого типа, например с магнитоэлектрическим возбуждением, и содержат индукторы 9 и 1О и якорные обмотки 11 и 12. Дат чики положения индуктора также могут быть любого типа, например индуктивные с подмагничиванием, и содержат в данном конкретном случае по шесть -чувствительных элементов (каналов) 13-18 и 19-24, соответственно. Коммутаторы могут быть выполнены на любых известных управляемых переключающих приборах (ключах), например транзисторах, и содержат в данном конкретном случае по шесть ключей 25-30 и 31-36 соответственно. Электродвигатели в данном конкретном случае содержат по шесть функциональных преобразователей 37-42 и 43-48, осуществляющих преобразование каждого сигнала датчика в последовательность импульсов, следующих друг за другом с интервалом времени, соответствующим величине пространственного рассогласования между индуктором данного электродвигателя и индуктором электродвигателя, отстающего по направлению движения, и по шесть формирователей 49-54 и 55-60 импульсов каждый. Каждый из указанных формирователей формирует по крайней мере один импульс на временном интервале между двумя последовательностями импульсов, длительность которого соответствует указанной величине пространственного рассогласования. Электродвигатели 1 и 2 подключены к источнику электроэнергии любого типа, например источнику 61 постоянного напряжения. t Якорные обмотки 11 и 12 синхронных машин 3 и 4 подключены к выходам коммутаторов 7 и 8. Многоканальные датчики 5 и 6 положения индуктора связаны с цепями управления ключей 25-ЗО и 31-36 коммутаторов 7 и 8.через функциональные преобразователи 37-42 и 43-48. К цепям управления ключей 25-ЗО и 31-36 под594кпючены формирователи 49-54 и 55-60 импульсов соответственно. На примере двух функциональных преобразователей 37 и 43 и двух формиро вателей 49 и 55 показаны их связи с каналами датчиков 5 и 6. Функциональные преобразователи 37 /и 43 связаны с одноименными каналами 13 и 19 датчиков 5 и 6. Формировате пи 49 и 55 связаны с каналами датчиков 5 и 6,первый 49 - с каналами 16 и 24, а второй 55 - с каналами 18 и 22. Все эти связи являются необходимыми (но не достаточными) и показаны условно в том смысле, что каждый конкрет ный функциональный преобразователь, например преобразователь 37, осуществляет преобразование каждого сигнала канала 13 датчика 5 положения индуктора в последовательность импульсов, следующих Друг за другом с интервалом времени, соответствующим величине пространственного рассогласования между индуктором 9 данного электродвигателя 1 и индуктором 10электродвигателя, отстающего по направлению движения, и измеренным с помощью сигнала одноименного с каналом 13 канала 19 датчика 6 положения индуктора и, что формирователь, наприме формирователь 49, осуществляет формирование по крайней мере одного импульса на временном интервале между двумя указанными последовательностями импуль сов, длительность которого соответствует указанной величине пространственно- го рассогласования, измеренного с помощью сигналов каналов 16 и 24 датчи т ков 5 и 6. Формирователь импульсов и функциональный преобразователь (фиг. 2), напри мер фо1 лирователь 49 и преобразователь 37, могут быть реализованы с помощью логической 5гчейки 62, включающей одну пятивхсЛовую логическую схему ИЛИ 63 и пять схем 64-68 Совпадения, причем схема 64 трехвходовая, а схема 65-68 двухвходовая. Формирователь 55 импульсов и преобразователь 43 электродвигателя 2 peaira зованы соответственно логической $гчей-у кой 69, включающей. аналогичнЛае- логические схемы 70-75. К входам схемы 64 совпадения подключены каналы (чувствитегаьные эпемен ты) 13 и 17 датчика 5 и каналы 19 датчика 6, к входам , 65.совпадем ния - каналы 17 датчика 5 и каналы 22 датчика 6, к входам схемы 66 совпадения подкгаочены каналы 13 датчика 2 5 и каналы 24 датчика 6 и к входам схемы 68 совпадения - каналы 15 дат чика 5 и каналы 20 датчика 6. Выходы схем 64-68 совпадения подключены к . входам логической схемы ИЛИ 63, выход которой подключен к цели управления ключа 25 коммутатора 7. Аналогичные соединения выполнены и для логических схем 70-75 электродвигателя 2. В каналах 14-18 и 20-24 датчиков 5 и 6 включены соединенные анёлогичным образом логические ячейки 768О и 81-85. Устройство работает следующим образом. Пусть сигналы - (jjj,. в канапа9с Датчика 6 остают в фазовом отношении от одноименных с ними сигналов ,-U-jg р каналах датчика 5 на угол Д. Преобразование сигналов в данном случае осуществляется в каналах 13-18 датчика 5. Функциональные преобразователи 37-42 осуществляют преобразование каждого сигнала, например сигнала It). .в последовательность импульсов 86 и 87 (фиг. 4), следующих друг за другом с интервалом времени, соответствующим величине пространственного рассогласо- вания ф. между индукторами 9 и 10. Указанное преобразование, например, в канале 13 датчика 5 осуществляют логические схемы 64 и 66 совместно с схемой 63. Совместно с функциональными преобразователями 37-42 функционируют формирователи 49-54 импульсов, которые формируют в данном конкретном случае в управляющей цепи ключа 25 три импульса 88-90 (фиг. 4) на временном интервале it между двумя последовательностями импульсов 86 и 87. Эти импульсы 88-9О сформированы с помощью логических схем 67, 68 и 65 совместно с схемой 63. На ключи 25- ЗО коммутатора 7 поступают преобразо- ванные сз1гналы (( (фиг. 4). Функциональныепреобразователи и формирователи импульсов электродвигателя 2 iae осуществляют преобразования, поскольку его индуктор отстает, в фазовом отнсниенви от индуктора 9 электродвигателя 1. Линейное напряжение U в Г.корной обмотке 11 для. рассматриваемо-го случая изображено на фиг. 4. Для сравнениятам же изображена форма пинейного напряжения якорных обмотках 11 и 12 при синфазном врашенив роторов электродвигателей 1 и 2. Сформированное таким образом линейное напряжение ( на якорной обмотке 11 опережающего в фазовом отношении электродвигателя 1 обеспечивает на интервалах времени, соответствующих измеренным вепсичинам пространственного рассогласования между синхронно движущимися индукторами электродвигателей эффективное торможение противовкпючением, Сравнение линейных напряжений Уд, реализуемых в известном и предлагаемом устройствах и изображенных соответственно на фиг. 3 и 4, показывает, что при одной и той же величине угла рассогласования Д величина линейного напряжения (ее первая гармоническая составляющая) в предлагаемом устройстве меньше, чем величина линейного напряжения Уд в известном устройстве. Это означает, что в предлагаемом устройстве определенная величина угла рассогласова ния Д соответствует большей величине разности моментов нагрузок на валах пе вого и второго электродвигателей, неже- ли в известном устройстве, или, что то же самое, определенной величине разности моментов нагрузок в предлагаемом устройстве соответствует меньшая величина угла рассогласования между синхро но вращающимися индукторами эйектродвигателей, чем в известном устройстве. Это становится особо важным для особо точных электроприводов, где кроме требования синхронного вращения стоит требование минимального фазового рассогласования. Кроме того, эффективное торможение опережающего в фазовом отношении элек тродвигателя повышает устойчивость работы электропривода. Это становится яс ным из рассмотрения простого примера. Пусть два электродвигателя работают на холостом ходу. На одном из них мрмент нагрузки увеличивается скачком. Электропривод должен уменьшить частоту вращения, причем темп уменьшения частоты вращения определяется нагруженным электродвигателем. Нагруженный электродвигатель в известном устройстве уменьщает свою частоту за счет частичного отключения источника питания, т.е. на выбеге. При конечном значении момента инерции темп изменения частоты нагружаем го электродвигателя не будет соответствовать темпу изменения частоты нена- груженного электродвигателя, что приведет к нарущению синхронного вращения э лектродвигате лей. В изобретении этого произойти не мо-, же т, поскольку опережающий в фазовом отнощении электродвигатель эффективно тормозится. Изобретение позволяет регулировать Величину тормозящего момента. В пртмере рассмотрен один из эффективных вариантов симметричного торможения противоБключением. Если уменьшить чис--, яр импульсов, поступающих с формирователей 49-54, до двух в каждом канапе, то будет реализовано менее эффективное несимметричное торможение противовключением. Для этого из логической ячейки 62 следует исключить одну из схем совпадения, например схему 65. Если дополнительно в каждой логической ягчейке исключить логические схемы, одноименные с логической схемой 67 совпадения, то на временном интервале будет сформирован один импульс 89 (фиг. 4), что соответствует еще менее эффективному симметричному динамическому торможению. Если такой импупьс будет сформирован для части ключей коммутатора, то эффективность торможения будет еще более уменьшена. Такое построение схемы управления .позволяет в зависимости от сочетания моментов нагрузкой, моментов инерции и параметров электродвигателя организовать любую желаемую величину тормозного момента на опережающем в фазовом отношении электродвигателе. Предлагаемое устройство может быть использовано в однополупериодных коммутаторах, например трехфазных. Для управления тремя ключами коммутатора в электродвигателях, как правило, используется три чувствительных элемента датчика положения индуктора, установлен - ных в пространстве с угловым сдвигом 21С/3 эл. град. Для получения шести каналов достаточно установить угловую длительность сигнала с каждого чувствите пь iного элемента в tT эл. град, и затем преобразователь с помощью элементов логики трехканальную систему сигналов в шестиканальную с длительностью сигнала эп. град. Уменьшение времени переходного процесса в изобретении при возмущающих воздействиях, например при сбросе нагрузки на одном из электродвигателей, достигается тем, что индуктор этого электродвигателя при прочных равных условиях смещается в фазовом отношении на меньший угол (относительно индуктора другого электродвигателя). изобретенияФормулаМногодвигатепьный электропривод с синхронно врашагошимися эпектродвигатепями, содержащими каждый синхронную машину с многоканальным датчиком положения индуктора, связанного по части каналов с цепью управления по крайней мере одного кпюча коммутатора через функциональный преобразователь каждого сигнала в последовательность импульсов, следующих друг за другом с интервалом времени, соответствующим величине пространственного рассогласования между индуктором данного электродвигатегй и индуктором электродвигателя отстающего по направлению движения, отличающийся тем, что, с целью повыщения устойчивости и уменьшения вели 9 2 чины пространственного рассогласования и времени переходного процесса, к цепи управления указанного ключа подключен формирователь по крайней мере одного импульса на временном интервале межпу двумя указанньп га последовательностями импульсов, длительность которого соо-гветствует указанной величине пространственного рассогласования. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 3400752, кл. Н 02 Р 7/68, 1971. 2.Авторское свидетельство СССР.-№ 395956, кл. Н О2 Р 7/68, 1973. 3.Авторское свидетельство СССР по заявке № 2571484/07, кл. Н 02 Р 7/68, 1978.
II
II
Фш.г
Фу.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Многодвигательный электропривод | 1978 |
|
SU785938A2 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Способ управления многодвигательным электроприводом | 1978 |
|
SU769696A1 |
| Многодвигательный электропривод | 1977 |
|
SU692050A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Способ реверсирования частоты вращения многодвигательного электропривода | 1978 |
|
SU792522A1 |
| Двухдвигательный электропривод | 1984 |
|
SU1249687A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |