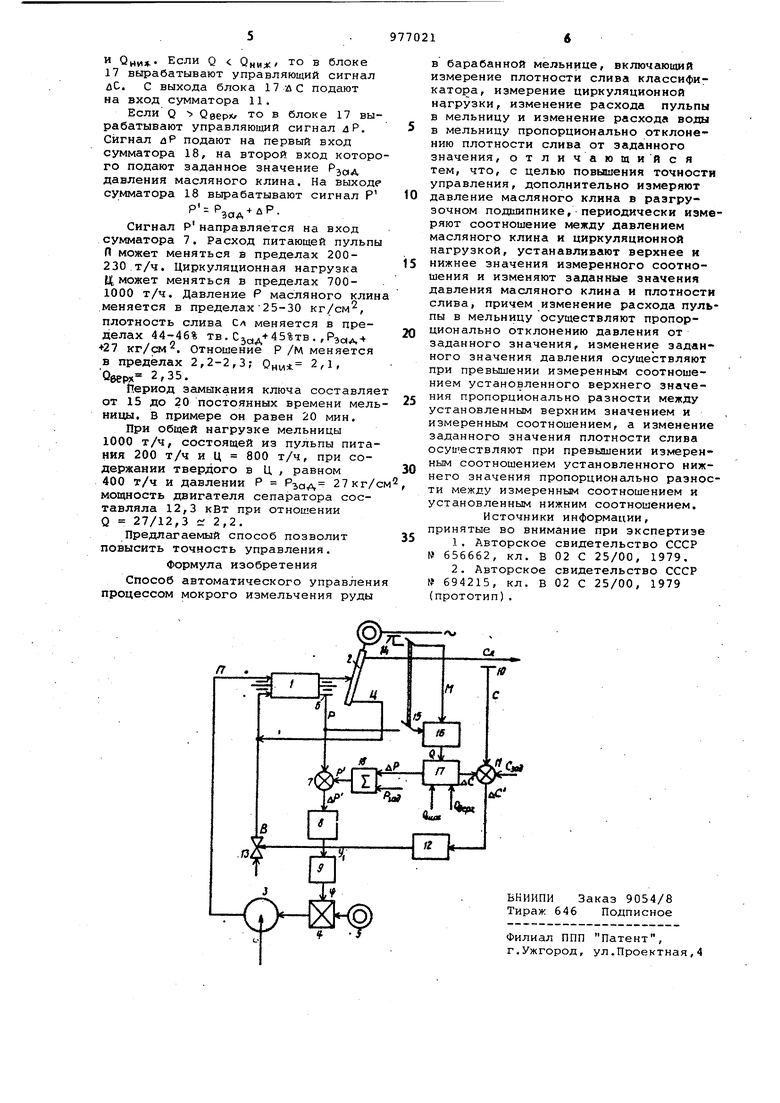
крупности в сливе классификатора из-за малой точности измерения весо вого расхода и влагосодержания песков , Цель изобретения - повышение точности управления. Поставленная цель достигается тем, что В способе автоматического управления процессом мокрого измель чения руды в барабанной мельнице, включающем измерение плотности слива классификатора, измерение циркуляционной нагрузки, изменение расхо пульпы в мельницу, и изменение расхода воды в мельницу пропорциональн отклонению плотности слива от задан ного значения, дополнительно измеряют давление масляного клина в раз грузочном подшипнике, периодически измеряют соотношение между давление масляного клина и циркуляционной на рузкой, устанавливают верхнее и ниж нее значения измеренного соотношени и изменяют заданные значения давления масляного клина и плотности сли ва, причем изменение расхода пульпы в мельницу осуществляют пропорционально отклонению давления от задан ного значения, изменение заданного значения давления осуществляют при превышении измеренным соотношением установленного верхнего значения пропорционально разности между уста новленным верхним значением и измеренным соотношением, а изменение заданного значения плотности слива осуществляют при превьзшении измеренным соотношением установленного нижнего значения пропорционально разности между измеренным соотношением и установленным нижним соотношением. На чертеже представлена функциональная схема системы, реализующей способ. Система содержит барабанн-ую мель ницу 1 мокрого помола, сепаратор 2 с электроприводом, насос 3, питающий мельницу пульпой, свариатором 4 и двигателем 5, датчик 6 давления масляного клина, сумматор 7, регулятор 8, исполнительный механизм 9, датчик 10 плотности слива, сумматор 11, регулятор 12 с преобразователем, исполнительный механизм (клапан) 13, датчик 14 мощности электродвигателя сепаратора 2, ключ 15, арифметическое устройство 16, вычислительное устройство 17, сумма тор 18, Выход датчика б давления Р соеди нен с первым входом сумматора 7, выход которого соединен с входом регулятора 8. Выход регулятора 8 соединен с входом исполнительного механизма 9, выход которого соединен с вариатором 4 числа оборотов насоса 3, Выход насоса соединен с входом мельницы 1, Выход датчика 10 соединен с первым входом сумматора 11, на второй вход которого подают заданное значение плотности слива 3ctA- Выход cyNtMaTopa 11 соединен с входом регулятора 12, выход которого соединен с регулирующим клапаном 13, регулирующим поток воды В , направляемый в мельницу 1. Выход датчика 14 мощности W через ключ 15соединен с первым входом арифметического устройства 16, вход которого через ключ 15 соединен с выходом датчика б. Выход устройства 16соединен с первым входом вычислительного устройства 17, на второй и третий вход которого подают верхнее йверхи нижнее Оц установленные значения отношения измеренных величин Рим. Первый выход блока 17 соединен с первым входом сумматора 18, на второй вход которэго подают заданное значение Pj давления масляного клина. Выход сумматора 18 соединен с вторым входом сумматора 7, Второй выход блока 17 соединен с третьим входом сумматора 11. Способ осуществляется следующим образом. Сигнал Р с выхода датчика 6 подают на вход сумматора 7, на второй вход которого подают Ьигнал Р . в сумматоре 7 производят сравнение этих сигналов. Сигнал сравнения с выхода сумматора 7 подают ha вход регулятора В, реализующего ПИ-закон управления и вырабатывающего, управляющий сигнал. Управляющий сигнал преобразуют с помощью исполнительного механизма 9 в угловое перемещение Ч вала вариатора 4, связывающего двигатель 5 с насосом 3. При этом меняют число оборотов насоса 3 и расход пульпы, подаваемой на вход мельницы. Изменение расхода происходит до тех пор, пока сигнал сравнения не становится равным нулю. Плотность слива С измеряют датчиком 10 и сигнал С , пропорциональный плотности слива, подают на вход сумматора 11, в котором производят сравнение и на выходе которого вырабатывают сигнал, направляемый на вход регулятора 12, управляющего с помощью -клапана 13 потоком воды В по пи-закону. Периодически (по мере замыкания ключа 15) измеряют с помощью датчика 14 мощность IA двигателя привода клао,сификатора 2,. пропорциональную циркуляционной загрузке П. Сигнал с выхода датчика-14 одновременно с сигналом Р с выхода датчика 6 подают на входы блока 16, где находят их отношение Q. Q Р/М Сигнал Q подают на вход блока 17 где производят сравнение его с Qgepx
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом мокрого измельчения руды в шаровой мельнице | 1982 |
|
SU1039560A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Система автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491579A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ МЕЛЬНИЦЫ СЛИВНОГО ТИПА В ЗАМКНУТОМ ЦИКЛЕ | 1997 |
|
RU2146176C1 |
| Способ автоматического управления двухстадийным циклом мокрого измельчения | 1980 |
|
SU874185A1 |
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ИЗМЕЛЬЧИТЕЛЬНЫМ АГРЕГАТОМ ЗАМКНУТОГО ЦИКЛА | 1997 |
|
RU2146175C1 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491580A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВУХСТАДИАЛЬНЫМ ЗАМКНУТЫМ ЦИКЛОМ МОКРОГО ИЗМЕЛЬЧЕНИЯ | 2010 |
|
RU2463111C2 |
| Система управления измельчительным комплексом | 1982 |
|
SU1021472A1 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1414461A1 |
